

15 Передаточные функции разомкнутой, замкнутой сау и ошибки регулирования.
Характеристические уравнения систем
Типовая структура замкнутой САУ, передаточная функция и характеристическое уравнение разомкнутой системы.
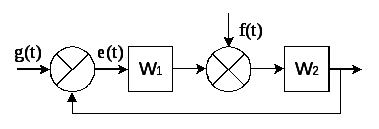
![]() –передаточная
функция разомкнутой системы.
–передаточная
функция разомкнутой системы.
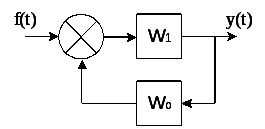
Для линейных систем применим принцип суперпозиции воздействий (независимых воздействий).
![]() - Передаточная
функция замкнутой системы относительно
регулирующей величины по задающему
воздействию.
- Передаточная
функция замкнутой системы относительно
регулирующей величины по задающему
воздействию.
![]() –передаточная
функция замкнутой системы относительно
задающей величины по возмущающему
воздействию.
–передаточная
функция замкнутой системы относительно
задающей величины по возмущающему
воздействию.
![]() –передаточная
функция замкнутой системы относительно
ошибки регулирования, по задающему
воздействию.
–передаточная
функция замкнутой системы относительно
ошибки регулирования, по задающему
воздействию.
![]() –передаточная
функция замкнутой системы относительно
ошибки регулирования, по возмущающему
воздействию.
–передаточная
функция замкнутой системы относительно
ошибки регулирования, по возмущающему
воздействию.
![]() –передаточная
функция разомкнутой системы
–передаточная
функция разомкнутой системы

![]() –Характеристическое
уравнение разомкнутой системы получается
приравниванием к нулю знаменателя
передаточной функции разомкнутой
системы.
–Характеристическое
уравнение разомкнутой системы получается
приравниванием к нулю знаменателя
передаточной функции разомкнутой
системы.
Для нахождения характеристического уравнения замкнутой системы необходимо также приравнять к нулю знаменатель передаточной функции замкнутой системы
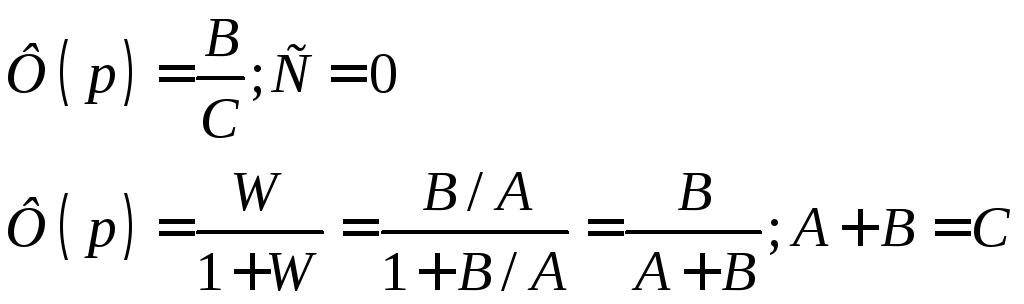
Характеристическое уравнение замкнутой системы может быть получено приравниванием к 0 суммы числителя и знаменателя передаточной функции разомкнутой системы.
16 Устойчивость линейных систем.
Под действием возмущений управ-я вел-на отклоняется от заданного состояния. В ответ на это УУ (регулятор) формирует управл-е воздействие на объект стремясь вернуть регулир-ую величину к заданному значению. В результате совместного действия управл-его и возм-его воздействий в системе происходит переходный процесс. Возможны 4 варианта его протекания: 1) с течением времени управл-я велич. возвращается с некоторой точностью в заданное равновесное состояние. Такой переходный процесс назыв. сходящимся, а система устойчивой.
Г еометр.
интерпретация системы:
еометр.
интерпретация системы:

2) Система не может восстановить равновесное состояние. Управляемая вел-на все больше удал-ся от заданного значения. Такой перех. процесс назыв. расходящимся, а система не устойчивой.
Г еометр.
интерпр.
еометр.
интерпр.

3 )
Пограничный между 1и2. В системе возникают
незатухающие колебания регулируемой
величины. Такой перех. процесс назыв.
незатух-им колебат., а система считается
находящимся на границе устойчивости.
)
Пограничный между 1и2. В системе возникают
незатухающие колебания регулируемой
величины. Такой перех. процесс назыв.
незатух-им колебат., а система считается
находящимся на границе устойчивости.
Г еометр.
интерпр.
еометр.
интерпр.
4








 )
В системе не возникает переходного
процесса. Значение управл. переменной
остается на том же уровне при котором
оно достигло под действ. возмущения.
Это будет нейтрально устойчивая система.
)
В системе не возникает переходного
процесса. Значение управл. переменной
остается на том же уровне при котором
оно достигло под действ. возмущения.
Это будет нейтрально устойчивая система.
Вывод: устойчивость- это способность САУ возвращаться с некоторой точностью в заданное равновесное состояние после того как она была выведена из него в результате какого-либо воздействия. Более точная математ-я формулировка понятие точности принадлежит А.А. Ляпунову. Def невозмущенное движение y(t) (установив. режим) будет устойчивым если для любого наперед заданного положительного числа δ как бы оно мало не было можно выбрать другое положит. число λ(δ) такое что для любого возмущения удовлет. условию: Σni=1Δ2fio< λ(δ), то возмущенное движение будет удовлет. условию Σni=1Δ2yi<δ начиная со времени t>t0. Геометр. это выглядит так:
Э та
формулировка отражает то что при
нарушении равновесия абсолютная величина
отклонения управляемой переменной
та
формулировка отражает то что при
нарушении равновесия абсолютная величина
отклонения управляемой переменной
должна по истечению достаточно длительного промежутка времени стать меньше некоторого заранее заданного числа δ. Понятие устойчивости можно сформулировать: линейное САУ назыв. устойчивой если ее выходная величина остается огран. при любых ограниченных по величине возмущениях. Следует отметить что геометр. интерпретация устойчивости соотв. линейным системам. Реальные системы как правило не линейны и характер устойчивости САУ может иметь след. вид:
О пределение
устойчивости САУ:
а) прямые т.е путем решения диф. ур.
системы и анализа системы, б) по корням
харак-го
пределение
устойчивости САУ:
а) прямые т.е путем решения диф. ур.
системы и анализа системы, б) по корням
харак-го
уравнения, в) с помощью критерия устойчивости.