

27 Построение желаемой лах.
Она строится на основе некоторых технических требований: 1) υ порядок астатизма 2) tрег≤tрег*
σ ≤ σ* 4) требования по точности: Ест ≤ Ест*, Еск ≤ Еск*, Еуск ≤ Еуск* => (c0,c1,c2) .
![]()
![]()
g(t) = Vmax*t Kv ≥ Vmax/Eск* = 1/c1

![]()
![]()

![]()
![]()
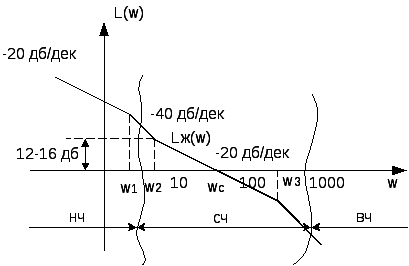
Если перегиб однократный λ = 1 -20→ -40 [дб/дек]
![]()
Если перегиб двукратный λ = 2 -20→ -60 [дб/дек]
![]()
![]()
![]()
![]()
В ВЧ динамич. параметры не учитывают.
29 Виды корректирующих устройств.
Под синтезом САУ понимается задача выбора и расчета специальных корректирующих устройств, обеспечивающих заданные статические и динамические св-ва. Синтез САУ: структурный, параметрический. При синтезе предполагается, что в основные ф-ые элементы исполн. и измерит. уже выбраны в соответствии с ТЗ и составляют вместе с объектом управления неизменяемую часть системы. К изменяемой части относятся коррект. устройства, определяемые в результате синтеза.
Методы синтеза: 1. аналитический – оптимальный метод, м-д Боднера, м-д Соколова, м-д стандартных коэффициентов. 2. графо-аналитические – м-д ЛАХ, м-д корневого годографа, частотный м-д.
![]() Виды
корректирующих устройств. Последовательные
корр. уст-ва
Виды
корректирующих устройств. Последовательные
корр. уст-ва
1. Введение производной от ошибки.
![]()
W(S) = Wнч(S) * (1+Ts)
![]()
φ(w) = φнч(w) + arctg(Tw)

2. Увеличение общего к-та усиления разомкнутой системы
![]()
3. Введение интеграла от ошибки
![]()
W(S) = Wнч(S)/S
![]()
![]()
Параллельные корректирующие устройства
![]()
![]()
1. Жесткая обратная связь
Wку(S) = K
Wоу(S) = K/(ToS+1) ПОС(+) ООС(-)

![]()
![]()
Если К↑ то вместо Wоу(S) поставим Ko/S
W(S) = K1/(T1S+1), K1=1/K↓ T1=1/(K0K)↓ при К↑
2. Инерционная жесткая обратная связь.
 ООС
(-)
ООС
(-)
![]()
3. Гибкая обратная связь
Wky(S) = KS
![]()
![]()
![]()
![]()
30 Нелинейные сау. Типовые нелинейные звенья.
САУ называется нелинейной, если хотя бы одно звено системы описывается нелинейным уравнением. Различают статические и динамические нелинейности. Статические нелинейности представляются в виде статических нелинейных характеристик. Динамические в виде нелинейных дифф-ых характеристик.
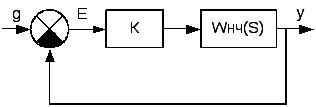
Структурная схема, состоящая из одного нелинейного звена и линейной части может быть представлена схемой
![]()
К такой структуре приводятся все системы с одним нелинейным элементом (НЭ) и произвольной линейной частью (ЛЧ) по правилам преобразования структур линейных звеньев.
Существенные нелинейности, с которыми приходится иметь дело на практике, можно разделить на однозначные и неоднозначные.
|
|
|
|
| |
|
|
|
|
Звено типа нечувств-ть | |
|
|
|
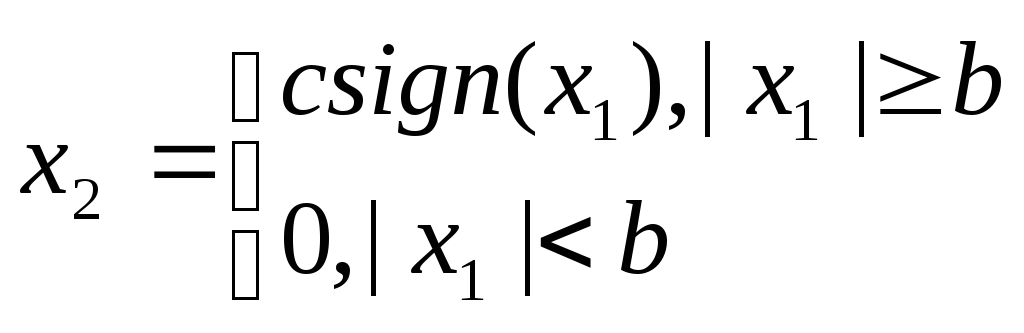
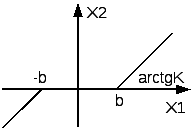
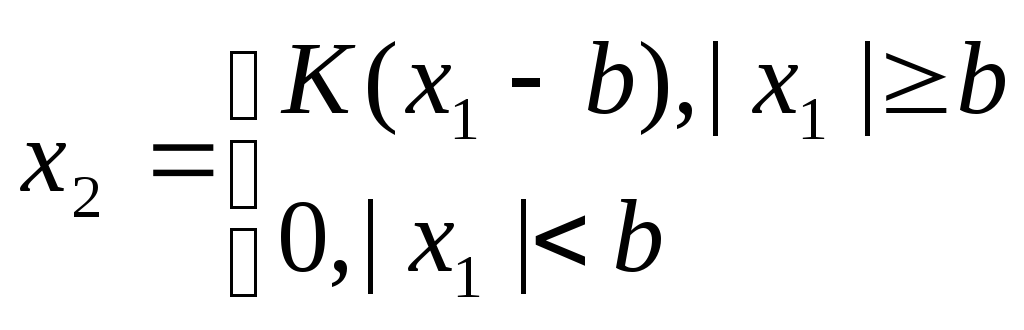
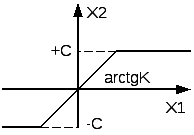
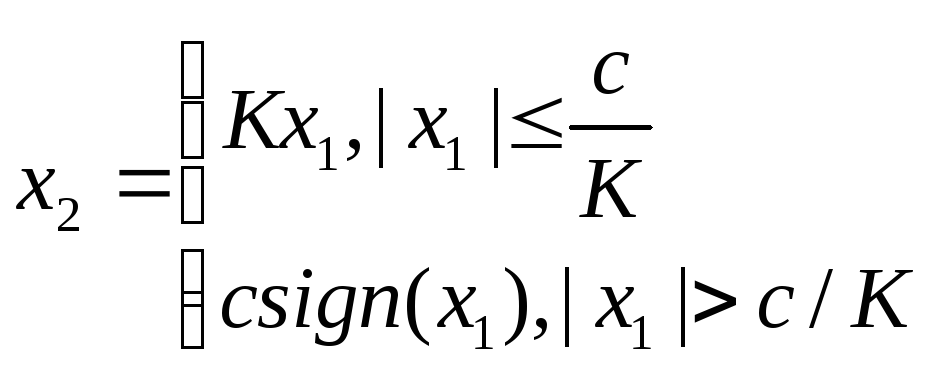
Звено типа ограничения
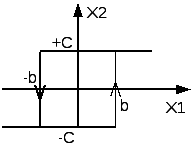
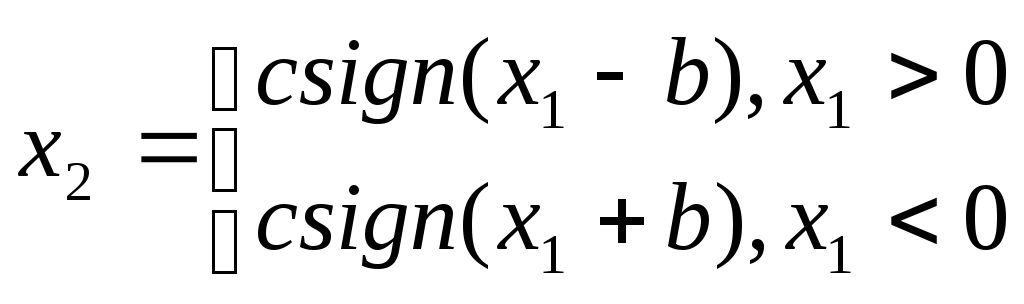
Звено типа двухпозиционное реле (реле с гистерезисом)
31 Соединения нелинейных элементов.
Если система содержит несколько нелинейных элементов, которые соединены либо последовательно, либо параллельно, либо встречно – параллельно, то такую систему можно заменить одним эквивалентом нелин. элементов с результирующей статической характеристикой.