32 Основные различия между линейными и нелинейными системами.
1.В лин. системах применим метод суперпозиции.
В нелин. Системах метод суперпозиции не применим.
2. Устойчивость лин. систем зависит только от свойств самой системы и не зависит от величины самого сигнала.
В нелинейных системах устойчивость определяется параметрами системы, нач. условиями и амплитудой входного сигнала. Устойчивость нелинейной системы оценивают по 3 признакам:
– устойчивость в малом – это устойчивость системы при бесконечно малых отклонениях от исходного режима. При чуть больших отклонениях система становится неустойчивой.
– система устойчива в большом, если система устойчива при бесконечно больших отклонениях, которые возможны в данной системе. При малых система может быть неустойчива.
– система устойчива в целом, если система устойчива при любых воздействиях.
3. В линейных системах при отсутствии внешнего воздействия никогда не возникает установившееся колебание (автоколебание). Данное колебание возможно только в системе, которая находиться на границе устойчивости, но данное состояние неустойчивое. Малое изменение параметров системы может привести к неустойчивому, либо к устойчивому состоянию.
В нелинейных системах характерны автоколебания которые вызваны только свойствами самой системы, т.е. не являются реакцией на внешнее воздействие. При этом может быть несколько автоколебательных режимов с различной амплитудой и частотой.
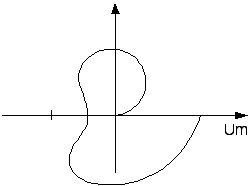
33 Устойчивость нсау. Метод гармонического баланса.
![]()
В этом случае будет динамически устойч. система, т.е. войдёт в автоколебательный режим.
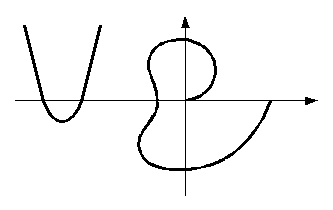
Изобразим это графически:
A:
0…![]()
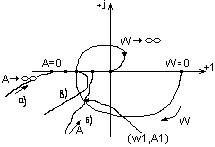
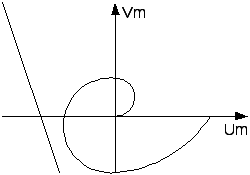
Z(A)= -1/J(A)
a) if годографы не пересекаются => решений ур-ния нет => автоколебаний нет.
б) if годографы пересекаются, then т. пересечения опред. частоту колебаний и конкретн. амплитуду, т.е. пар-ры (режим) автоколебаний.
в) Годографы пересекаются дважды (либо несколько).
(W1,A1) (W2,A2)
Метод применяется для исследования устойчивости иавтоколебаний линейной системы. С помощью данного метода исследуется отсутствие колебаний в нелинейной замкнутой системе и исследуется автоколебания.
y=F(x) (1)
![]() x
= asinwt
x
= asinwt
34 Устойчивость нсау. Устойчивость автоколебаний.
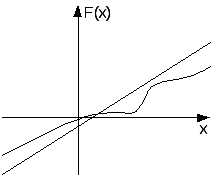
35 Устойчивость нсау. Абсолютная устойчивость. Критерий Попова.
Данный критерий дает дост. условия абсолютной устойчивости нелинейной системы по виду частот. характеристики линейной части системы.
Нелинейность лежит внутри [0, kmax]
0<F(x)<kmaxX
![]()
Состояние равновесия
нелинейной системы будет абсолютно
устойчивым, если нелинейная характеристика
находится в секторе [0,kmax]
и существует такое действительное число
h,
что при всех частотах w≥0
выполняется
![]()
![]()
Нелинейность лежит внутри [0, kmax]
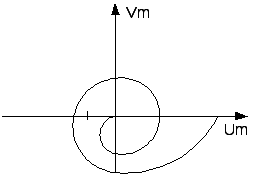
Графическая интерпретация.
1.Состояние равновесия нелинейной системы абсолютно устойчиво, если нелинейная характеристика F(x) находится внутри сектора [0,kmax] и можно привести через точку (-1/kmax,0) прямую таким образом, что она не пересечет модифицированную частотную характеристику вида: Wм(jw)=Uлч(w)+jwVлч(w)
 2.
[kmin,kmax]
2.
[kmin,kmax]
kminX<F(x)<kmaxX
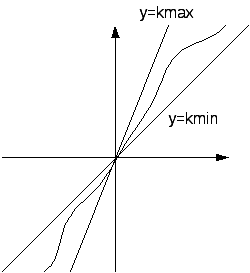
Геометрическая интерпретация. Состояние равновесия нелинейной системы абсолютно устойчиво, если через точки -1/kmin, -1/kmax можно провести параболу таким образом, чтобы она не пересекала модифицированную АФХ.