

23 Оценка качества регулирования.
Устойчивость САУ – необходимое, но не достаточное свойство. Устойчивая система при отработке различных воздействий может оказаться недостаточно точной, переходные процессы управления в ней могут затухать медленно, с большими или малыми отклонениями регулируемого параметра от заданного значения. Все эти и другие факторы отражают так называемое качество процесса управления и требуют специального исследования, т.е. не менее важной является проблема качества процессов регулирования. Под качеством процесса регулирования понимают способность автоматического регулятора поддерживать с достаточной точностью заданный закон изменения регулируемого параметра. Качество процесса регулирования тем выше, чем меньше отклонение регулируемого параметра от заданного значения и чем быстрее достигается заданный установившийся режим. Наиболее распространенными критериями качества в автоматике являются: статическая и динамическая ошибки регулирования, время регулирования, степень колебательности, интегральные критерии. Оценки качества регулирования, полученные на основе анализа графиков переходного процессов в САР при типовых воздействиях, называются прямыми оценками. Оценки качества регулирования, базирующиеся на анализе различных промежуточных характеристик, например на анализе передаточной функции, называются косвенными оценками.
24 Интегральные оценки качества регулирования.
Отклонение регулируемой величины от установившегося значения переходного процесса и время этого процесса можно охарактеризовать одним числом. Для этого применяются интегральные оценки качества переходного процесса.
Применяются интегральные оценки качества относительно задающего воздействия и относительно возмущения.
Линейная интегральная оценка
Численно она равна площади, ограниченной кривой отклонения x(t) и выражается через изображение по Лапласу X(s) отклонения x(t).
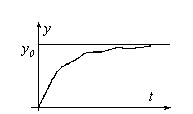
x(t)=y0+y(t).
![]() .
.
25 Повышение качества регулирования.
Существ разл требования системы автоматического управления. Основными явл: обеспечение устойчивости, повышение запаса устойчивости, повыш точности регулирования, повышение качества переходных процессов. В сложных системах многие из этих задач объединяют и иногда они явл противоречивыми и в зависимости от назнач системы одно ее условие делают приоритетным. Если необх параметры системы не м/б достигнты, изменения коэфф отдельных звеньев, тогда задача обеспечения кач-ва или точности решается введением в систему дополнит устройств, кот нзв корректирующими устройствами. Выделяют 3 вида корр устройств:
1) последовательные
2)параллельные
3)встречно-параллельные
Последовательная коррекция корр устройства вкл напрямую цепь устройства. Применяют в таких системах, где управляющим сигналом явл либо пост ток, либо напряжение
26 Синтез последовательных корректирующих устройств.
Корректирующие устройства могут включаться последовательно и параллельно элементам прямой цепи и встречно-параллельно, т. е. в виде корректирующих обратных связей.
Последовательное корректирующее устройство включают непосредственно после элемента сравнения или после каскадов предварительного усиления.
Параллельное корректирующее устройство – используется гораздо реже, но в некоторых случаях позволяет достаточно простыми способами достичь эффективного решения.
![]()
W(p)=k/p+k0=k(τp+1)/p; Встречно – параллельные корректирующие устройства охватывает исполнительный элемент и конечные каскады усилителей мощности.
![]()
![]()
![]()
![]() Подберем
таким образом, чтобы в рабочем диапазоне
частот W2(jw)*Wk(jw)>>1;
Wэ=1/Wk;
Свойства цепи со встречно – параллельным
корректирующим устройством будут
определяться только свойствами самого
корректирующего устройства. Рекомендуется
охватывать наиболее неблагоприятные
участки.
Подберем
таким образом, чтобы в рабочем диапазоне
частот W2(jw)*Wk(jw)>>1;
Wэ=1/Wk;
Свойства цепи со встречно – параллельным
корректирующим устройством будут
определяться только свойствами самого
корректирующего устройства. Рекомендуется
охватывать наиболее неблагоприятные
участки.
Корректирующие обратные связи делятся на жесткие и гибкие.
Жесткие образуются в безинерционном и инерционном звеньях.; W(p)=k0; W(p)=k0/(T0p+1)
Жесткие обратные связи действуют как в переходных так и в установившемся режиме, поэтому могут использоваться для коррекции точностных показателей и динамических свойств системы.
Гибкие обратные связи образуются идеальным и реальным дифференцирующим звеньями.
W(p)=k0p; W(p)=k0p/(T0p+1); Действуют только в переходных режимах, поэтому используются для коррекции динамических свойств системы.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()