

2. Математическая модель безинерционного звена
Безинерционное
звено отличается от апериодического
звена первого порядка наличием очень
малой постоянной времени,
которой пренебрегают. При ступенчатом
изменении входного сигнала выходная
переменная практически мгновенно
выходит на новое значение
(Рис. 5). При нулевом значении постоянной
времени апериодического звена оно
превращается в безинерционное с
передаточной функцией
![]() .
Коэффициент передачи безинерционного
звена находится по статической
характеристике элемента, построенной
на основании паспортных или
экспериментальных данных (см. пример
1, рис. 1)см.
ментальныхдачи безинерционного звена
находится по статической характеристике
элемента на основании паспортных данных
или э или
по переходному процессу при ступенчатом
изменении входного сигнала (рис. 5).
.
Коэффициент передачи безинерционного
звена находится по статической
характеристике элемента, построенной
на основании паспортных или
экспериментальных данных (см. пример
1, рис. 1)см.
ментальныхдачи безинерционного звена
находится по статической характеристике
элемента на основании паспортных данных
или э или
по переходному процессу при ступенчатом
изменении входного сигнала (рис. 5).
3. Математическая модель интегрирующего элемента
Интегрирующее
звено является астатическим звеном. К
астатическим относятся звенья, для
которых нельзя построить статическую
характеристику, т.е. однозначную
зависимость выходного сигнала от
входного
![]() .
Важным случаем статической зависимости
является линейная зависимость
.
Важным случаем статической зависимости
является линейная зависимость
![]() ,которая,
в основном, используется в теории
управления. Апериодическое звено первого
порядка после окончания переходного
процесса (выходная величина выходит на
установившееся значение и производная
выходной величины становится равной
нулю) описывается статической
характеристикой
,которая,
в основном, используется в теории
управления. Апериодическое звено первого
порядка после окончания переходного
процесса (выходная величина выходит на
установившееся значение и производная
выходной величины становится равной
нулю) описывается статической
характеристикой
![]() ,т.е.
каждому значению x
соответствует свое значение y.
,т.е.
каждому значению x
соответствует свое значение y.
Для интегрирующего звена нет однозначной зависимости между y и x. При открытии крана на входе емкости уровень жидкости в емкости будет расти постоянно и нельзя построить зависимость между уровнем жидкости в емкости и расходом жидкости через кран. Аналогично при подаче напряжения на электрический двигатель нельзя построить зависимость между углом поворота вала двигателя и величиной напряжения.
Но
интегрирующие звенья имеют однозначную
зависимость между величиной входного
сигнала и скоростью изменения выходного
сигнала. Интегрирующее звено описывается
дифференциальным уравнением
![]() .Интегрирующее
звено имеет один параметр – коэффициент
пропорциональности между входным
сигналом и скоростью изменения выходного
сигнала k.
.Интегрирующее
звено имеет один параметр – коэффициент
пропорциональности между входным
сигналом и скоростью изменения выходного
сигнала k.
Передаточную
функцию звена получим путем преобразования
по Лапласу исходного дифференциального
уравнения. Для этого заменим знак
дифференцирования на оператор p
и заменим функций времени
![]() на функции оператора Лапласа
на функции оператора Лапласа![]() .
Модель интегрирующего звена в операторной
форме будет иметь вид
.
Модель интегрирующего звена в операторной
форме будет иметь вид
![]() .
.
Найдем отношение изображения выходной величины к изображению по входной величины, которое является передаточной функцией звена
![]() .
.
Рассмотрим на примерах построение модели интегрирующего звеньев аналитическим методом, затем построение модели на основании экспериментальных данных.
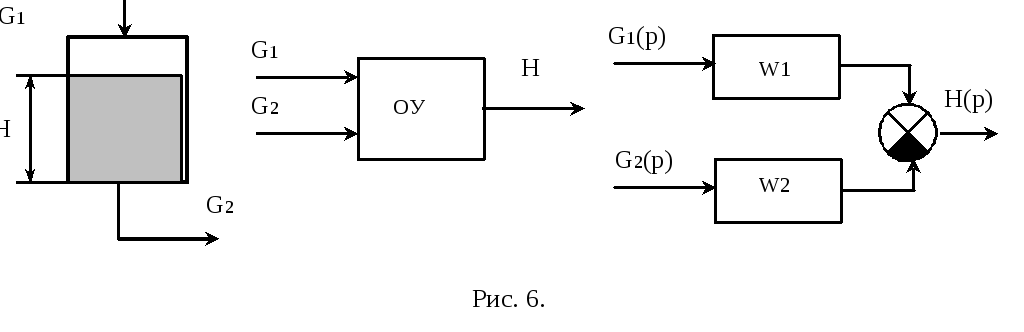
Пример
1. Построение
математической модели объекта управления
ОУ системы регулирования уровня
аналитическим методом. Имеется емкость,
в которой необходимо стабилизировать
уровень реагента. Функциональная и
структурные схемы ОУ приведены на рис.
6. Объемные расходы реагентов на входе
и выходе, соответственно,
![]() .
Геометрические размеры емкости – объемV,
сечение S.
.
Геометрические размеры емкости – объемV,
сечение S.
Запишем уравнение материального баланса:
пусть начальный объем реагента в емкости при
 равен
равен ,
,за время
 в емкость пришло жидкости
в емкость пришло жидкости ,
ушло из емкости
,
ушло из емкости ,
,значение объема на момент времени
 равно
равно ,
,изменение объема dV за время dt равно разности объемов реагента, поступившего в емкость и вышедшего из емкости:
![]()
или
![]() ,
,
объем жидкости равен
 ,
тогда
,
тогда
 ,
,уравнение, описывающее зависимость уровня от входного и выходного расходов будет иметь вид
 .
.
Используя преобразование Лапласа при нулевых начальных условиях, запишем
![]()
![]()
![]() .
.
При
использовании в качестве управляющего
воздействия
![]() запишем
запишем![]() .
.
Тогда
передаточные функции по управляющим
воздействиям, соответственно, будут
![]() .
.
 Пример
2. Построение
модели на основании экспериментальных
данных. Пусть имеется емкость, объем
которой
Пример
2. Построение
модели на основании экспериментальных
данных. Пусть имеется емкость, объем
которой
![]() ,
сечение
,
сечение![]() ,
но нам размеры неизвестны. Произведем
эксперимент. Откроем входной вентиль
на заданное значение расхода, например
,
но нам размеры неизвестны. Произведем
эксперимент. Откроем входной вентиль
на заданное значение расхода, например![]() и запишем график изменения уровня
жидкости в емкости. Уровень будет расти
от начального значения
и запишем график изменения уровня
жидкости в емкости. Уровень будет расти
от начального значения![]() с постоянной скоростью (см. рис. 7). При
данном расходе за
с постоянной скоростью (см. рис. 7). При
данном расходе за![]() в емкость поступит
в емкость поступит![]() жидкости и уровень увеличится на
жидкости и уровень увеличится на![]() ,
что и отображено на экспериментально
полученном графике на рис. 9.
,
что и отображено на экспериментально
полученном графике на рис. 9.
Нам
известен расход жидкости и имеется
график изменения уровня жидкости в
процессе эксперимента. При постоянном
значении входного сигнала
![]() выходная переменная изменяется с
постоянной скоростью, следовательно,
мы имеем интегрирующее звено. Запишем
уравнение математической модели
интегрирующего звена - скорость изменения
выходной переменной пропорционально
входному сигналу
выходная переменная изменяется с
постоянной скоростью, следовательно,
мы имеем интегрирующее звено. Запишем
уравнение математической модели
интегрирующего звена - скорость изменения
выходной переменной пропорционально
входному сигналу
![]() или
в приращениях
или
в приращениях
![]()
Согласно
графику,
![]() ,
,
Значение
 .
.
Тогда
передаточная функция объекта управления
![]() .
Полученное значение коэффициента
совпадает с исходными данными
.
Полученное значение коэффициента
совпадает с исходными данными![]() .
.