

5.3 Синтез корректирующих звеньев
Назначением корректирующих звеньев (КЗ) является обеспечение желаемых динамических и точностных показателей ЭП. Поэтому фактически с ПУ и УМ является регулятором привода, реализующим закон управления, обеспечивающий заданное качество, в линейном ЭП желаемые показатели полностью определяются видом ЖЛАХ, поэтому вид и параметры КЗ могут быть определены по взаимному расположению ЖЛАХ и РЛАХ разомкнутого ЭП. [1] Электропривод можно представить как произведение располагаемой передаточной функции ЭП Wр(р) и передаточной функции некоторого КЗ Wк(р):
Wж (р) = Wр(р) * Wкз (р),
откуда следует
Lк = Lж – Lр, (5.12)
где
![]() -ЛАХ
корректирующего звена;
-ЛАХ
корректирующего звена;
![]() -ЛАХ
желаемого звена;
-ЛАХ
желаемого звена;
![]() -ЛАХ
располагаемого звена.
-ЛАХ
располагаемого звена.
Lk=66–56=10Дб
Запишем новые значения постоянных времени Т, определенных по рисунку 5.7 ЖЛАХ:
Теперь представим общий вид передаточной функции, заметим, что в ней присутствует новый коэффициент:
(5.13)
С учетом всех посчитанных значений передаточная функция КЗ будет выглядеть так:
![]() (5.14)
(5.14)

Рисунок 5.10. Структурная схема скорректированной системы

Рисунок 5.11 Переходный процесс скорректированной системы

Рисунок 5.12 ЛАХ корректирующего звена
Такой способ коррекции дал желаемые результаты. Они удовлетворяют требованиям, заданным в техническом задании показателя M=1.4, наш процесс не превышает заданного значения.
5.4 Расчет принципиальной схемы
Корректирующее устройство реализуется на двух последовательных схемах. Передаточные функции первого и второго КЗ имеют вид: 5.16, 5.17 соответственно.

Рисунок 5.10 Первое корректирующие звено
Передаточная функция первого КЗ выглядит так:
![]()
![]() (5.16)
(5.16)
Передаточная функция этого звена определяется в виде:
![]()
Далее приведены расчетные соотношения для данного звена:

![]()
Таким образом,

Передаточная функция второго КЗ выглядит так:

![]() (5.17)
(5.17)

Рисунок 5.11 Второе корректирующие звено
Передаточная функция этого звена определяется в виде:

Далее приведены расчетные соотношения для данного звена:

Таким образом,

6. Расчет точности работы привода при случайных воздействиях
В реальных условиях эксплуатации систем управления характер как управляющих, та и возмущающих воздействий таков, что эти воздействия нельзя считать строго определенными функциями времени. В радиолокационной системе сопровождения, отраженный от цели сигнал содержит в себе помехи в виде многочисленных флуктуации, происходящие от вибраций и поворотов цели, замирания сигнала. Поскольку величина воздействий в каждый момент времени и процесс их зависит от множества разнообразных факторов случайным образом связанных друг с другом, то в следящих системах не только возмущающие воздействия и помехи представляются случайными функциями, но и сам полезный сигнал, как правило, носит случайный характер.
Задача исследования формируется следующим образом. Необходимо рассчитать оценку ошибки электропривода, если известны структура ЭП и его параметры, а также задан вид и параметры задающего и возмущающего воздействий, которые в общем случае представляют собой сумму регулярно и случайной составляющих.
Структурная схема привода антенны может быть приведена к виду, показанному на рисунке 6.1, где приняты следующие обозначения:
g(t) – задающее воздействие;
f(t) – возмущающее воздействие;
Θ(t) – координата выхода ЭП;
W1(p), W2(p) – передаточные функции, которые в общем случае определяются следующим образом:
 (6.1)
(6.1)
 (6.2)
(6.2)
Задающее воздействие g(t) в общем виде определяется выражением:
![]() ,
(6.3)
,
(6.3)
где
-![]() регулярная составляющая, математическое
ожидание задающего воздействия;
регулярная составляющая, математическое
ожидание задающего воздействия;
![]() -случайная
составляющая задающего воздействия,
которая задается спектральной плотностью
Sg(ω)
стационарного случайного процесса.
-случайная
составляющая задающего воздействия,
которая задается спектральной плотностью
Sg(ω)
стационарного случайного процесса.
Возмущающее воздействие в общем виде может быть задано следующим образом:
![]() ,
(6.4)
,
(6.4)
где–fp(t) регулярная составляющая возмущающего воздействия, представляющая собой ступенчатую функцию;
fc(t) – случайная составляющая возмущающего воздействия, которая задается спектральной плотностью Sf(ω) стационарного случайного процесса
Анализ
установившегося режима работы
проектируемого ЭП производится исходя
из предположения, что исследуемая
система является устойчивой, а сигналы
![]() и
f(t)
некоррелированные, то есть:
и
f(t)
некоррелированные, то есть:
![]()
Математические ожидания ошибки находятся в операторной форме по выражениям (6.5) – (6.7):
![]() (6.5)
(6.5)
![]() (6.6)
(6.6)
![]() (6.7)
(6.7)
здесь g(p) и f(p) – изображения по Лапласу процессов g(t) в f(t).
Передаточная функция Фέg(p) и Фέf(p) для системы, представленный на рисунке 6.1, определяется следующим образом:
![]() (6.8)
(6.8)
либо с учетом 6.1 и 6.2 имеем:
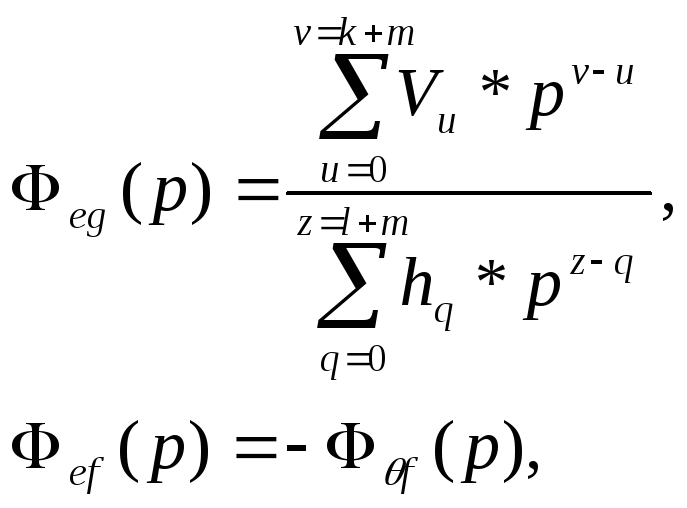 (6.9)
(6.9)
где Феf(p) – передаточная функция от помехи к выходу ЭП, определяемый по соотношению:
![]() (6.10)
(6.10)
либо с учетом 6.1 и 6.2 имеем:
 (6.11)
(6.11)
Дисперсия ошибки может быть определенна следующим образом:
![]() (6.12)
(6.12)
где
![]() и
и
![]() –
слагаемые дисперсии ошибки от воздействия
g(p)
и f(p),
соответственно.
–
слагаемые дисперсии ошибки от воздействия
g(p)
и f(p),
соответственно.
Дисперсии![]() и
и
![]() вычисляются следующим образом:
вычисляются следующим образом:
![]() (6.13)
(6.13)
![]() (6.14)
(6.14)

Pиcунок 6.1. Структурная схема ЭП при случайных воздействиях

Рисунок 6.2, Структурная схема ЭП воздействия фединга
Соотношение 6.13 и 6.14 могут быть приведены к интегралу вида
![]() (6.15)
(6.15)
где
![]() (6.16)
(6.16)
![]() (6.17)
(6.17)
здесь n‑степень полинома A(jw).
В общем случае при любом n для устройства САУ интеграл In может быть представлен в виде:
![]() (6.18)
(6.18)
где
 (6.19)
(6.19)
совпадает с точностью до знака со старшим определителем Гурвица, а числитель Mn определяется выражением:
 (6.20)
(6.20)
Соотношения, определяется в общем виде интегралы In, вычислены до n=7.
Примером случайного воздействия, влияющего на точность работы привода антенны, является фединг. Этим термином определяют флуктуации амплитуды принимаемого радиолокационного сигнала, обусловленные характером отражения электромагнитных волн от сложных поверхностей и изменениями плотности атмосферы. Основную роль в возникновении фединга играет главный фактор, если отражающая поверхность имеет сложную конфигурацию и случайным образом изменяет свою ориентацию в пространстве, то отраженный от нее сигнал будет иметь случайную амплитуду. Эта амплитуда есть модуль векторного сигнала, представляющего собой результат наложения сигналов, отраженных от элементарных площадок поверхности. [8]
Влияние фединга обычно учитывают в виде случайного изменения угловой ошибки слежения РЛС. Спектральная плотность фединга определяется следующим выражением:
 (6.21)
(6.21)
где Gф – среднее квадратичное отклонение;
α, β – числовые значения.
Спектральная плотность имеет максимум на частотах ω=±β, равных величине
![]()
![]() (6.22)
(6.22)
График спектральной плотности изображен на рисунке 6.3
Корреляционная функция фединга, соответствующая спектральной плотности 6.21, имеет вид
![]() (6.23)
(6.23)
Значение
параметров равных:
![]() ;
;
![]()
![]()

Рисунок 6.3. Спектральная плотность фединга
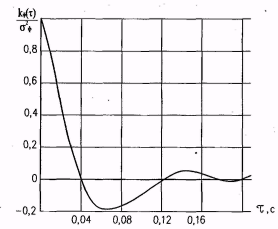
Рисунок 6.4. Корреляционная функция фединга
Рассчитаем точность разработанного в данном проекте привода антенны, задаваясь этими исходными данными для спектральной плотности.
Спектральная плотность Sф(ω) есть спектральная плотность возмущающего случайного воздействия.
Структурную схему привода антенны рисунок 6.1 при рассмотрении влияния на систему фединга можно привести к виду, показанному на рисунке 6.2.
![]()
![]()
Коэффициенты числителя передаточной функции по возмущению:
v0=0.00000093;
v1=0.00088;
v2=0.109;
v3=3.036;
v4=1;
Коэффициенты знаменателя передаточной функции по возмущению:
h0=0.00000093;
h1=0.00088;
h2=0.109;
h3=3.036;
h4=5.08;
h5=255;
Коэффициенты подынтегрального выражения по выражению для Sф находятся следующим образом:

Теперь подставим в эти выражения коэффициенты числителя передаточной функции по возмущению:

Выведем коэффициенты подынтегрального выражения по выражению для Sф, для знаменателя:
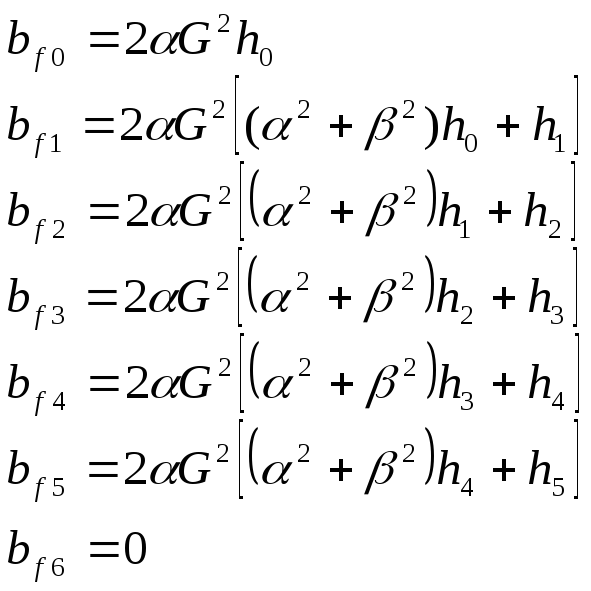
Теперь подставим в эти выражения коэффициенты числителя передаточной функции по возмущению:
![]()
Найдем интегральное выражение In, по формуле 6.18:
![]()
Исходя из величины полученного результата, можно сделать вывод, что система устойчива к данной помехе, т. е. это случайное воздействие не значительно влияет на качество привода и, следовательно, регулятор не требует дополнительной доработки.