

1 Теоретична частина
1.1 Електродвигуни для хімічних установок та їх вибір
Вибір двигуна до електроприводу полягає у визначенні типу двигуна і його номінальних даних; потужності, номінальних значень напруги і частоти обертання, перевантажувальної здатності і т.д. Правильний вибір привідного двигуна забезпечує електроприводам тривалу надійну роботу в усіх заданих режимах. Вибір двигуна пов’язаний з забезпеченням цілої низки вимог, обумовлених параметрами мережі живлення, способом монтажу двигуна, зовнішніми умовами його експлуатації, режимом роботи електроприводу.
Параметри мережі живлення, визначають вибір типу двигуна (постійного або змінного струму, однофазний або трифазний) і його номінальну напругу. Спосіб монтажу і зовнішні умови експлуатації визначають будову двигуна (двигун на лапах або фланцевого кріплення, закритого або захищеного виконання) і його кліматичне виконання (для помірного, холодного, тропічного клімату і т.д.). Режим роботи електроприводу визначає вимоги до динамічних і статичних властивостей двигуна.
Вимоги до динамічних властивостей двигуна залежать від частоти пуску і гальмування, характеру доповнення і зняття навантаження до двигуна. Наприклад, при частих пусках і гальмуванні необхідний двигун із малим моментом інерції ротора (якоря), тобто холодіючий невеликим маховим моментом GD2, де G і D-відповідно маса ротора (якоря) і його зовнішній діаметр.
Статичні властивості двигуна оцінюються механічною характеристикою, тобто залежністю частоти обертання n від електромагнітного моменту М або струму якоря Іа. В залежності від виду механічної характеристики усі електродвигуни поділяють на три групи:
1) електродвигуни з абсолютною жорсткою механічною характеристикою,
що має вигляд прямої, паралельної вісі абсцис (рис.1.1,а, графік 1). Такою механічною характеристикою володіють синхронні двигуни, у яких частота обертання в усьому діапазоні припустимих навантажувальних моментів залишається постійною;
2) електродвигуни з жорсткою механічною характеристикою, у яких збільшення навантажувального моменту на валу супроводжується незначним зменшенням частоти обертання. Таку характеристику мають асинхронні двигуни загального призначення (рис.1.1,а, графік 2) і двигуни постійного струму незалежного (паралельного) збудження (рис.1.1,б, графік 1);
3) електродвигуни з м’якою механічною характеристикою, у яких з підвищенням навантаження частота обертання значно зменшується. Такою характеристикою володіють асинхронні двигуни з підвищеним активним опором у колі обмотки ротора. Наприклад, асинхронні виконавчі двигуни (рис.1.1,а, графік 3), двигуни постійного струму послідовного збудження (рис.1.1,б, графік 2) і паралельного збудження з додатковим резистором у колі якоря (рис.1.1, б, графік 3).
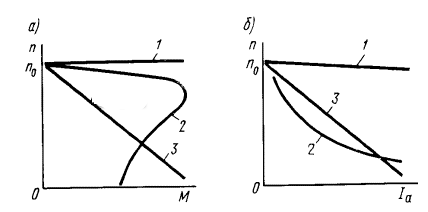
Рисунок 1.1 − Механічні характеристики асинхронного і синхронного двигунів (а) і електромеханічні характеристики двигунів постійного струму (б).
Вибір типу двигуна варто починати з розгляду питання про можливість використання трифазного асинхронного двигуна з короткозамкненим ротором, тому що ці двигуни найбільш прості за будовою, надійні, мають високі енергетичні показники. Недоліки цих двигунів: невеликий пусковий момент і великий пусковий струм, що у 5-7 разів перевищує номінальне значення робочого струму. У електроприводі великої потужності виправдовується застосування трифазних синхронних двигунів, що мають найбільш високі енергетичні показники (ККД і коефіцієнт потужності).
При необхідності регулювання частоти обертання варто розглянути питання про доцільність застосування в електроприводі трифазного асинхронного двигуна з короткозамкненим ротором сумісно з регулюючим перетворювачем частоти, трифазного асинхронного двигуна з фазним ротором або двигуна постійного струму незалежного збудження. Основні недоліки двигунів постійного струму: необхідність у джерелі постійного струму, висока вартість, необхідність у систематичному догляді в процесі експлуатації, понижена надійність через часті неполадки в щітково-колекторному вузлі, неможливість встановлення у вибухо- і пожежонебезпечних середовищах, завади радіоприйому, для усунення яких приходиться застосовувати спеціальні міри. Проте двигуни постійного струму переважають асинхронні двигуни з короткозамкненим ротором за регулюючими і пусковими властивостями.
При виборі двигуна за потужністю необхідно намагатися, щоб номінальна потужність двигуна була достатньо близькою до необхідної потужності. Вибір двигуна з номінальною потужністю, що набагато перевищує необхідну, призводить до того, що двигун протягом усього періоду експлуатації працює недовантаженим, а отже, із низькими значеннями ККД і коефіцієнта потужності, що веде до неоправданих експлуатаційних витрат, при цьому зростають габаритні розміри, маса і
Вартість електроприводу. Визначаючи необхідну номінальну потужність
привідного двигуна, спочатку обчислюють його розрахункову потужністьPрозр.. Методика визначення Pрозр. залежить від режиму роботи електроприводу.
Якщо режим роботи електроприводу тривалий з постійним навантажувальним моментом, то розрахункова потужність привідного двигуна, кВт.
Pрозр. =Мсω·10-3=0,105·10-3·Мсn2 , (1.1)
Мс – статичний момент, Н×м; n2 – частота обертання вала двигуна, об/хв.
По каталогу на електродвигуни прийнятого принципу дії з урахуванням напруги і частоти обертання вибирають двигун із номінальною потужністю, на 10-20% перевищуючий розрахункову, тобто Pном. =(1,1/1,2)Pрозр.
Тут Pрозр. – розрахункова потужність двигуна для тривалого режиму роботи (1.1). По розрахунковому значенню потужності Pрозр. вибирають двигун, номінальна потужність якого перевищує розрахункову на 10-20% .
Вибраний
тип двигуна варто перевірити на
перевантажувальну здатність і на
величину початкового пускового моменту.
Мінімально допустиме значення
перевантажувальної здатності двигуна
Мmax/Мном
 (якщо
за умовами роботи електроприводу не
має потреби в ще більшому значенні
перевантажувальної здатності).
(якщо
за умовами роботи електроприводу не
має потреби в ще більшому значенні
перевантажувальної здатності).
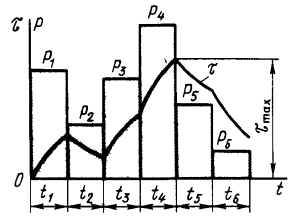
Рисунок 1.2 − Графік змінного навантаження електродвигуна.
Якщо режим роботи електроприводу тривалий із змінним навантаженням, то навантаження на валу двигуна змінне, тобто статичний момент електроприводу змінюється в часі. При цьому в привідному двигуні має місце несталий тепловий процес (рис.1.2), так як в різні відрізки часу t1,t2,t3,… втрати потужності неоднакові. Графік нагрівання двигуна τ=f (t)у цьому режимі має вигляд ломаної кривої лінії.
Для визначення необхідної номінальної потужності привідного двигуна в цьому режимі поступають наступним чином. Спочатку визначають попереднє розрахункове значення потужності двигуна, кВт,
P'розр.=(Р1+Р2+…)/nt, (1.2)
де Р1,Р2…- потужності на валу двигуна в різні відрізки часу, кВт;
nt - кількість відрізків часу, що відповідають різноманітній потужності на валу двигуна.
За отриманим значенням P'розр , попередньо вибирають привідний двигун, номінальна потужність якого на 10-20% .
Потім, користуючись технічними даними вибраного типу двигуна, визначають уточнене значення розрахункової потужності Pрозр.( Для цього застосовують метод еквівалентного струму, який базується на тому, що електричні втрати двигуна пропорційні квадрату струму навантаження, тобто cp - коефіцієнт пропорційності між струмом навантаження двигуна і потужністю змінних втрат. Скориставшись графіком змінного навантаження двигуна (рис.1.2), запишемо формулу для розрахунку сумарних втрат енергії за увесь час роботи електроприводу:
 (1.3)
(1.3)
 – сумарні
втрати двигуна, рівні сумі магнітних і
механічних втрат;
I1,I2,I3
– струми, споживані двигуном у відрізки
часу
t1,t2,t3,…
відповідно.
– сумарні
втрати двигуна, рівні сумі магнітних і
механічних втрат;
I1,I2,I3
– струми, споживані двигуном у відрізки
часу
t1,t2,t3,…
відповідно.
Якби привідний двигун працював протягом часу t із постійною навантаження, то втрати енергії в ньому;
 (1.4)
(1.4)
де Iекв – еквівалентний струм двигуна, працюючи з яким при постійному навантаженні двигун за час t нагрівається до такої ж температури, як і при роботі зі змінним навантаженням за той же час.
Таким чином, втрати енергії в двигуні при роботі з тривалою змінною навантаження відповідно до графіка навантаження за час t рівні втратам енергії цього ж двигуна, який працює з постійним навантаженням і струмом Іекв, тобто Використовуючи (1.3) і (1.4), після відповідних перетворень одержимо вираз для еквівалентного струму, А.
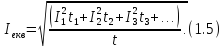
Струм Іекв не повинен перевищувати номінальний струм попередньо обраного двигуна (Іекв £ Іном). Якщо ця умова не виконується, то варто вибрати тип двигуна з великою номінальною потужністю.
Метод
еквівалентного струму при визначенні
номінальної потужності привідного
двигуна припускає сталість магнітних
і механічних втрат
 Якщо ж двигун працює при змінних магнітних
і механічних втратах, то метод дає значну
помилку. Це відноситься, наприклад, до
двигунів із послідовним збудженням, у
яких зміна струму якоря супроводжується
зміною магнітного потоку, а отже, і
величини магнітних втрат.
Якщо ж двигун працює при змінних магнітних
і механічних втратах, то метод дає значну
помилку. Це відноситься, наприклад, до
двигунів із послідовним збудженням, у
яких зміна струму якоря супроводжується
зміною магнітного потоку, а отже, і
величини магнітних втрат.
Вибраний по каталогу двигун варто перевірити на перевантажувальну здатність, тобто переконатися, що найбільший навантажувальний момент, зумовлений навантажувальною діаграмою (рис. 1.2), не порушить стійкої роботи двигуна. При цьому необхідно врахувати можливі зниження напруги в мережі живлення. Двигун також потрібно перевірити по величині початкового пускового моменту з урахуванням як статичного навантажувального моменту, так і динамічного моменту.
При виборі привідного електродвигуна варто мати на увазі спосіб монтажу і виконання двигуна по виду захисту: горизонтальне або вертикальне розташування валу, монтаж двигуна на лапах або за допомогою фланця на передньому підшипниковому щиті, закрите або захищене виконання або ж двигун вибухозахищеного виконання.
При виборі асинхронних двигунів варто скористатися каталогом на трифазні асинхронні двигуни серії 4А, а при виборі двигуна постійного струму – каталогом на машини постійного струму серії 2П. Двигуни вказаних
серій є найбільш удосконаленими за своїми техніко-економічними показниками і широко застосовуються в усіх галузях народного господарства. Якщо ж двигуни вказаних серій не задовольняють пред’явленим вимогам, то доцільно обрати двигун якої-небудь серії спеціального застосування.