

7.3. Порядок проведения работы
7.3.1. Используя методические указания, плакаты и кинофильм, изучить общее устройство и назначение машин и оборудования для уплотнения грунтов.
7.3.2. Определить основные параметры и производительность машин и оборудования для уплотнения грунтов по исходным данным (табл. П.6), используя выражение (7.1).
Техническая производительность катка для уплотнения грунтов:
![]() ,
м3/ч,
(7.1)
,
м3/ч,
(7.1)
где h0 – толщина уплотняемого слоя грунта, h0 = 0,2 м; В – ширина рабочего органа, м; b – величина перекрытия, b = 0,1…0,3 м; VД – средняя действительная скорость, км/ч; kП – коэффициент, учитывающий потери, связанные с поворотом машин для уплотнения грунта, kП = 0,8…0,95; n – количество проходов для достижения необходимой плотности, n = 4…6.
7.4. ФОРМА ОТЧЁТА
7.4.1. Цель работы.
7.4.2. Описание назначения, устройства и классификации машин и оборудования для уплотнения грунтов.
7.4.3. Определение основных параметров и производительности по формуле (7.1).
7.4.4. Формулирование кратких выводов по лабораторной работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
-
Назовите, какие машины и механизмы применяют для уплотнения грунтов.
-
Поясните назначение и принцип работы прицепного виброкатка.
-
Перечислите машины динамического действия на грунт.
-
Поясните принцип действия виброплит и виброударных плит, их отличие.
-
Приведите уравнение производительности уплотняющего катка.
ЛАБОРАТОРНАЯ РАБОТА №8
ИЗУЧЕНИЕ РАБОЧЕГО ПРОЦЕССА И КОНСТРУКЦИИ
МАШИН ДЛЯ РАЗРАБОТКИ МЁРЗЛЫХ ГРУНТОВ
8.1. ЦЕЛЬ РАБОТЫ
Цель работы заключается в изучении студентами рабочего процесса, конструкции и определении производительности машин для разработки мёрзлых грунтов.
8.2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Для подготовки мёрзлых грунтов к экскавации чаще других применяют механический способ их разрушения. Основными группами машин, работающих по этому способу, являются навесные рыхлители, машины для нарезания щелей и разработки траншей, оборудование ударного и вибрационного действия.
Машины для рытья траншей и нарезания щелей разрабатывают мерзлый грунт резанием – снимая рабочими органами стружки небольшой толщины. Вследствие этого энергоемкость рабочего процесса получается большая, а производительность машин невысокая. Щели в мерзлом грунте нарезают для укладки кабеля, трубопроводов малого диаметра, а также для послойной разработки грунтов. В первом случае ширина щели определяется технологическими требованиями, во втором – она должна быть минимальной, так как нарезанные щели только разделяют массив на блоки, вследствие чего грунт можно удалять одноковшовым экскаватором. Размер блоков должен соответствовать размерам ковша экскаватора, а глубина прорези в сезонномёрзлом грунте составляет не менее 0,7…0,8 от глубины промерзания. Ниже этого уровня прочность замерзшего грунта значительно уменьшается и обычно его можно разрабатывать экскаватором. При небольшой ширине щели средняя энергоемкость процесса в 3…5 раз меньшая, чем при разработке сплошного массива мерзлого грунта резанием.
Основными рабочими органами для нарезания щелей служат баровые устройства, дисковые и кольцевые фрезы. Общий вид и схема баровой машины показана на рис. 8.1, 8.2. В нее входят базовая машина 4, гидроцилиндр подъема 3, трансмиссия 2 и баровый рабочий орган 1.
В качестве базовых машин используют тракторы с ходоуменьшителем (минимальная скорость – 30 м/ч) или цепные траншейные экскаваторы. С помощью гидропривода можно регулировать усилие прижатия резцов к забою. При наличии нескольких рабочих органов целесообразно устанавливать гидроцилиндры на каждый из них, что позволяет нарезать одну или несколько щелей одновременно.

Рис. 8.1. Общий вид баровой машины на базе трактора Т-130

Рис. 8.2. Принципиальная схема баровой землеройной машины
Баровый рабочий орган состоит из рамы и бесконечной цепи со сменными резцами. Цепь опирается на часто установленные направляющие ролики, не дающие ей свободно провисать и позволяющие получить достаточное напорное усилие. Одним комплектом резцов можно нарезать щели длиной 800…1000 м. Быстрый выход из строя резцов и баровой цепи – один из важнейших эксплуатационных недостатков баровых машин.
Принцип работы баровой машины подобен принципу работы цепного траншейного экскаватора. При движении цепи рабочий орган опускается на грунт и постепенно врезается до необходимой глубины. Разрушенный грунт выносится на поверхность цепью. В результате сочетания перемещения машины и движения цепи зубья срезают стружку и прорезают щель.
К основным конструктивным параметрам баровых машин относят длину рабочего органа, ширину щели, скорости движения баровой цепи и перемещения машины, число одновременно прорезаемых щелей, максимальное тяговое усилие, усилие подъема (перевода в транспортное положение) и опускания (прижатия к забою) рабочего органа.
Фрезерные машины (рис. 8.3) создают на базе гусеничных тракторов или роторных траншейных экскаваторов. Их конструктивная схема, как и принцип работы, аналогичны роторным экскаваторам.

Рис. 8.3. Схема фрезерной машины:
1 – гусеничный тягач; 2 – кронштейн; 3 – гидроцилиндр подъема;
4 – фрезерный рабочий орган
Основным отличием является небольшая ширина отрываемой щели и небольшая по сравнению с диаметром фрезы глубина щели, которая ограничена условиями выноса разрушенного грунта на поверхность.
На эффективность баровых и фрезерных рабочих органов влияют скорости резания и подачи, геометрия зубьев и их рациональная расстановка. Резцы нужно устанавливать так, чтобы предыдущие обеспечивали последующим работу в условиях полублокированного или свободного резания.
Мерзлый грунт легко разрушается растягивающими усилиями. Поэтому наиболее выгодным с энергетической точки зрения представляется разрушение мерзлых грунтов отрывом. Машины с винтовым рабочим органом, основанные на таком принципе разрушения, прикладывают к грунту нагрузку, направленную в сторону открытой поверхности. Исследования и производственные испытания показали, что способ разрушения мерзлого грунта растяжением достаточно эффективен.
Рабочие органы, разрушающие мерзлый грунт растягивающими усилиями, работают по двум схемам: с завинчивающимся анкером и с внедрением клина на границе замерзания. В первом случае (рис. 8.4, а) в грунт завинчивают до определенной глубины анкерное устройство. Затем усилием, направленным вдоль анкера, от поверхности отрывают конусообразные глыбы грунта, которые одновременно разрыхляются. Усилие может быть как статическим, так и динамическим. При наличии открытого забоя анкер (рис. 8.4, б) заглубляет клин, вдавливаемый тяговым усилием, развиваемым винтовым наконечником, до скола грунта в сторону открытой поверхности.

Рис. 8.4. Винтовой рабочий орган:
1 – штанга; 2 – упорный подшипник; 3 – клин; 4 – винтовой наконечник
Для внедрения клина в грунт на границе замерзания необходимо предварительно подготовить забой в виде уступа, из которого начинает работать машина. Обычно такой рабочий орган (рис. 8.5) устанавливают на трактор вместо отвала бульдозера. В этом случае клин заглубляется тяговым усилием трактора, а скол грунта происходит при подъеме клина гидроцилиндром. Усилие Рпод на подъем клина несложно рассчитать исходя из прочности грунта на разрыв σр, глубины промерзания Нц и угла скола грунта ψ. При этом прочность грунта σр нужно принимать равной прочности промерзшего слоя при средней температуре Тср.

Рис. 8.5. Разрушение грунта клином, внедряемым на границе замерзания:
h – глубина промерзания; 1 – тягач; 2 – рама; 3 – гидроцилиндр; 4 – клин
Перспективность применения таких машин очевидна, т.к. они воздействуют на мерзлый грунт, начиная от границы промерзания, где он наименее прочен по сравнению с более прочным поверхностным слоем.
Мерзлый грунт может разрушаться при соударении рабочего органа машины с грунтом (рис. 8.6), если кинетическая энергия его в значительной степени преобразуется в энергию деформации грунта. От места соударения в грунте распространяется волна, вызывающая в конечном счете разрушение грунта. Основная причина разрушения – появление наряду со сжатием под рабочим органом растяжения контактной поверхности в прилегающем районе. В результате в мерзлом грунте появляются трещины, опережающие начало скалывания. При забивании в грунт клина появляется, кроме того, расклинивающее усилие. При наличии свободной поверхности, в направлении которой происходит скол, это вызывает разрушение грунта, в основном, растяжением.
Способы вибрационного и виброударного разрушения мерзлых грунтов отличаются от способа ударного разрушения сравнительно большой частотой силовых импульсов при меньшей их энергии. Обычно механизмы, вызывающие колебания рабочего органа, обеспечивают частоту 8…120 Гц при энергии одного импульса от 0,1 до 30 кДж. Рабочие органы землеройных машин, у которых инструмент движется не только вместе с рабочим органом, но и относительно него, называют активными. Активизация рабочих органов позволяет подводить к забою дополнительную энергию, увеличивающую производительность и эффективность рабочего процесса.

Рис. 8.6. Конструктивные схемы клиновых рыхлителей:
а – с падающим рабочим органом; б – с забиваемым рабочим органом;
в – для послойного рыхления грунта
В зависимости от схемы крепления вибратора на рабочем органе различают три типа таких машин (рис. 8.7): вибрационные, виброударные и частоударные.
Вибрационный рабочий орган (рис. 8.7, а) состоит из вибратора, который жестко закреплен на рабочем инструменте. Под действием синусоидальной вынуждающей силы рабочий орган совершает колебания, передающиеся инструментом грунту. Более эффективны вибраторы направленного действия, которые обычно применяют для активизации рабочих органов землеройных машин.
Виброударный рабочий орган (вибромолот) производит как вибрационное, так и ударное воздействие на грунт. Он состоит из вибратора (см. рис. 8.7, б) и рабочего инструмента, соединенных пружинами. При движении вибратора под действием вынуждающей силы пружины вначале запасают энергию, а затем отдают ее инструменту, увеличивая силу соударения бойка и наковальни. Режим работы вибромолота зависит от регулировки механизма. Число ударов может быть равным частоте колебаний вибратора или быть меньше ее. Это число в значительной степени зависит от зазора х между бойком и наковальней, который может быть положительным, нулевым или отрицательным (боек прижимается к наковальне с определенной силой).
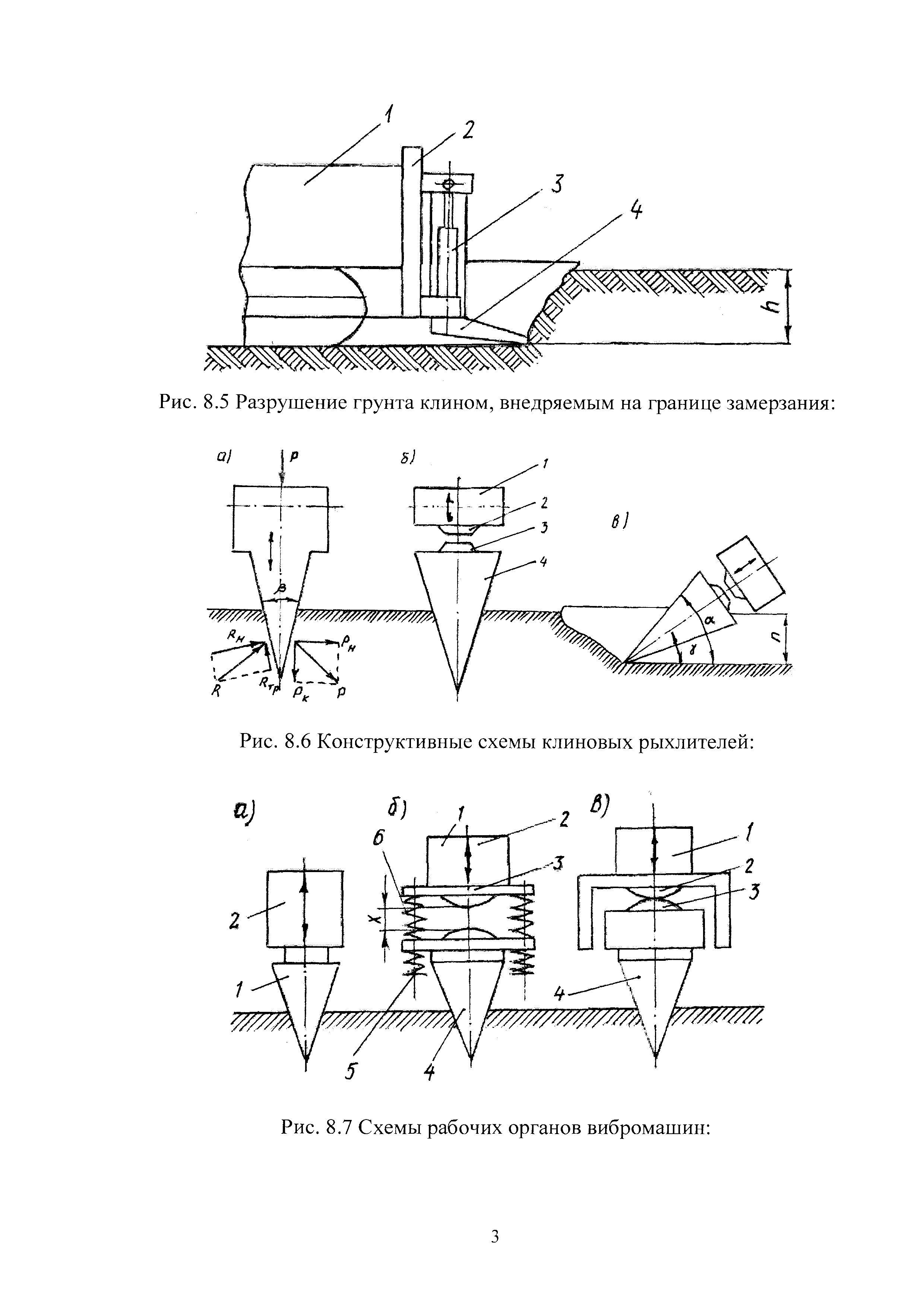
Рис. 8.7. Схемы рабочих органов вибромашин:
а – вибрационного действия; б – виброударного действия; в – частоударного действия; 1 – вибратор; 2 – боёк; 3 – наковальня; 4 – рабочий инструмент;
5, 6 – пружины
Когда вибратор и рабочий инструмент (см. рис. 8.7, в) не соединены, на грунт передаются частоударные нагрузки. По данным исследований, такие рабочие органы несколько менее эффективны, чем виброударные.