

1.Кінематичне та кіностатичне дослідження механізму
-
Вхідні данні
Таблиця 1.1
|
Довжина ланок, мм |
|
Вага ланок, кг |
|||||||||
|
l1 |
l2 |
l3 |
l4 |
ῳ,c-1 |
m1 |
m2 |
m3 |
m4 |
m5 |
||
|
70 |
200 |
175 |
210 |
40 |
0,5 |
0,85 |
0,8 |
0,9 |
1,4 |
||
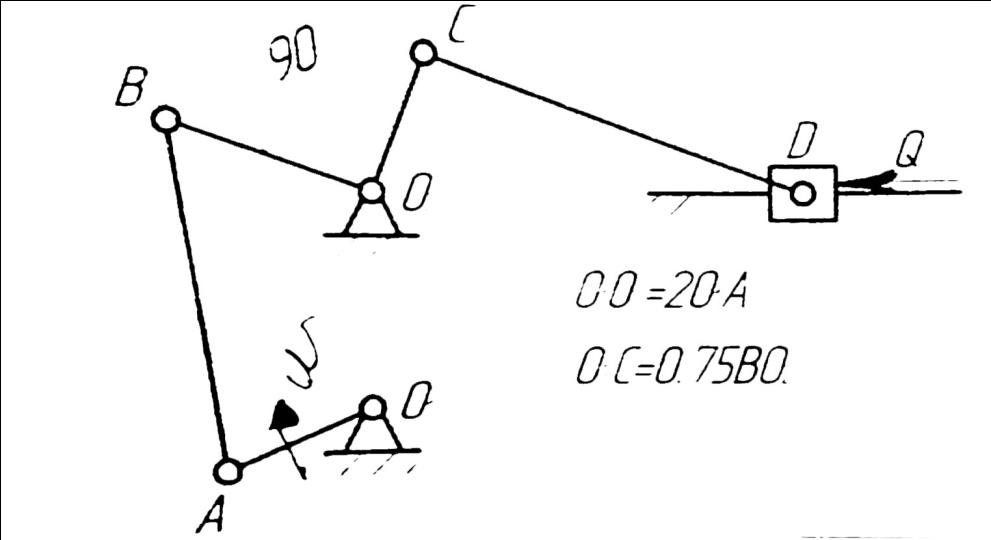
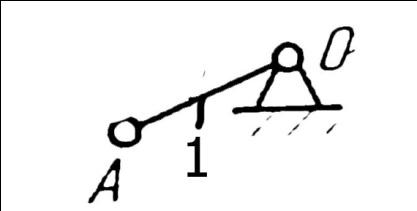
Рис.1.1 Схема преса
-
Структурний аналіз механізму.
Під структурним аналізом механізму мають на увазі визначення кількості
ланок, кінематичних пар з яких складається механізм їх кваліфікація, визначення рухомості, а також визначення класу і порядку механізму.
Даний механізм має шість ланок з яких п’ять рухливих.
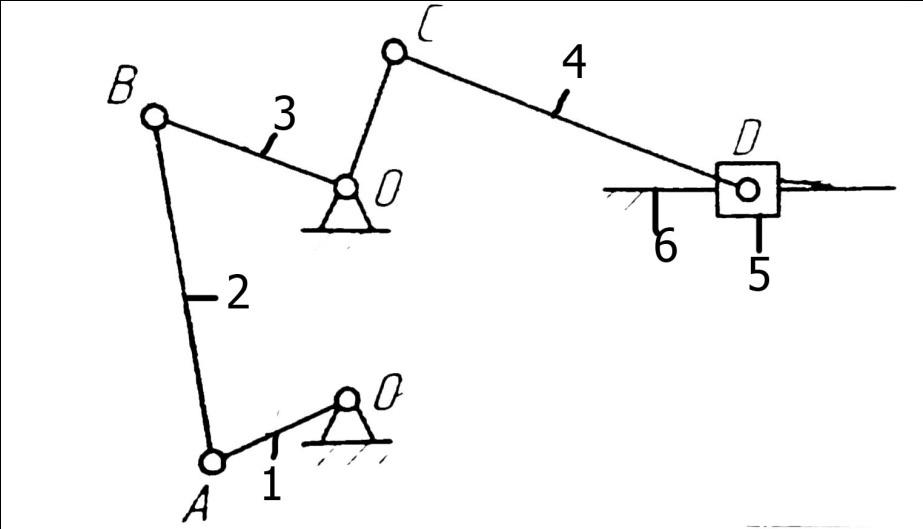
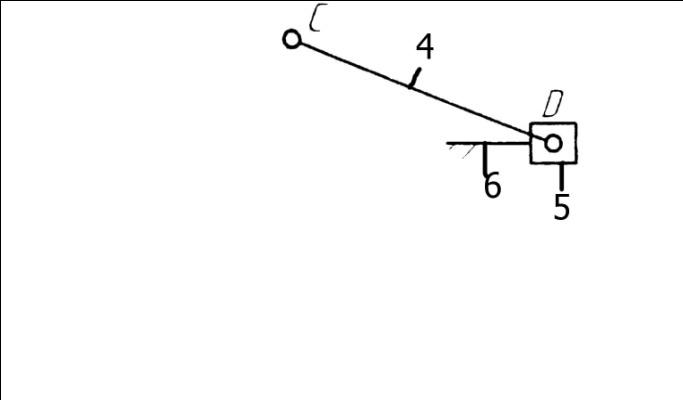
Рис.1.2 Схема преса
1 – кривошип, 2,4 – шатун, 3 – коромисло, 5 – ползун, 6 – стойка.
1–6, 1–2, 2–3, 3–4, 3–6, 4–5 – обертальні пари п’ятого класу.
5-6 – поступальна пара п’ятого класу.
Визначимо ступінь вільності даного механізму за формулою Чебишева.
W=3n-2P5-P4=3*5-2*7-0=1 (1.1)
Де n – кількість рухомих ланок.
P5 – кількість кінематичних пар п’ятого класу.
P4 – кількість кінематичних пар четвертого класу.
Зробимо класифікацію механізму по Ассуру – Артоболевському де клас механізму дорівнює найбільшому порядку групи Ассура, яка входить до цього механізму. Групою Ассура називається група ланок рухомість яких дорівнює 0. Клас групи Ассура дорівнює числу закритих кінематичних пар, а порядок числу можливих приєднань.
Даний
механізм має наступні пари.

1 Клас 2 клас, 2 вид
2 Клас, 1 вид
Рис.1.3 групи Ассура
Даний механізм є механізмом 2 класу.
1.3 Побудова восьми положень механізму.
З
довільної вибраної точки О1
проводимо коло радіусом О1А=70
мм. І по величині О1А
знаходимо масштабний коефіцієнт плану
механізму. Якщо на кресленні кривошип
зображений відрізком
 ,
а його дійсна величина
,
а його дійсна величина
 ,
то:
,
то:

Де
 –
дійсна величина 1 ланки, м:
–
дійсна величина 1 ланки, м:
О1А – креслярський розмір 1 ланки, мм.
Знаходимо мертві положення точки В.


На колі
радіусом О1А
знаходимо мертві положення точки А.
Мертві положення – це коли точки А в
крайньому верхньому і нижньому положенні.
Положення точки В знаходимо за формулами
(1.3) та (1,4), коли відрізок
 приймає верхнє мертве положення на АВ,
і навпаки, коли АВ накладається на
приймає верхнє мертве положення на АВ,
і навпаки, коли АВ накладається на
 .
Розбиваємо отримані кути: робочий кут
на 4 частини, і холостий кут на 4 частин.
Знаходимо точки В на дузі О2В=175
мм. Положення точки С знаходимо із
подібності О2С=0,75
О2В.
Відкладаємо с точки С відрізок DC=
210 мм і отримуємо переміщення повзуна
D.
.
Розбиваємо отримані кути: робочий кут
на 4 частини, і холостий кут на 4 частин.
Знаходимо точки В на дузі О2В=175
мм. Положення точки С знаходимо із
подібності О2С=0,75
О2В.
Відкладаємо с точки С відрізок DC=
210 мм і отримуємо переміщення повзуна
D.
1.4 Побудова плану швидкостей.
Знаходимо швидкість т.А для 6го положення.
 (1.5)
(1.5)
З
довільно вибраного полюса p
проводим промінь
 О1А
і на ньому відкладам відрізок pa=60мм.
По величині pa
знаходимо масштабній коефіцієнт плану
швидкості.
О1А
і на ньому відкладам відрізок pa=60мм.
По величині pa
знаходимо масштабній коефіцієнт плану
швидкості.
 (1.6)
(1.6)
де pa– графічна довжина швидкості т.А.
Для знаходження швидкості точки B вирішимо систему рівнянь.
 (1.7)
(1.7)
 (1.8)
(1.8)
де
 - переносна швидкості
т.В.
- переносна швидкості
т.В.
де
 - відносна швидкості т.В.
- відносна швидкості т.В.
Вирішуємо
(1.7) рівняння, з т.а проводимо промінь
 ,
а вирішуємо (1.8) рівняння через і на
перетині т.р.
,
а вирішуємо (1.8) рівняння через і на
перетині т.р.
 і на перетині отримуємо т.b.
З побудованого плану швидкості знаходимо.
і на перетині отримуємо т.b.
З побудованого плану швидкості знаходимо.
 (1.9)
(1.9)
 (1.10)
(1.10)
де pb– графічна довжина швидкості т.B.
ba–
графічна довжина швидкості
 .
.
Знаходимо швидкість точки С.
 (1.11)
(1.11)
де pс– графічна довжина швидкості т.С.
Для знаходження швидкості точки D вирішимо систему рівняння.
 (1.12)
(1.12)
 (1.13)
(1.13)
де
 - переносна швидкості
т.D.
- переносна швидкості
т.D.
де
 - відносна швидкості т.D.
- відносна швидкості т.D.
Вирішуємо
рівняння (1.12) з т.c
проводимо промінь
 DС
і на перетині з
горизонталлю
отримуємо т.d.
З побудованого плану швидкості знаходимо.
DС
і на перетині з
горизонталлю
отримуємо т.d.
З побудованого плану швидкості знаходимо.
 (1.14)
(1.14)
 (1.15)
(1.15)
де pd– графічна довжина швидкості т.D.
dc–
графічна довжина швидкості V .
.
Табл.1.2 Швидкості
|
№ |
VA, м/с |
VB, м/с |
VBA, м/с |
VC, м/с |
VD, м/с |
VDС, м/с |
|
4 |
2.8 |
0 |
0 |
0 |
0 |
0 |
|
5 |
2.8 |
6.21 |
7.36 |
4.6 |
5.29 |
1.288 |
|
6 |
2.8 |
5.244 |
3.634 |
3.933 |
2.507 |
1.932 |
|
7 |
2.8 |
1.84 |
1.15 |
1.38 |
0.667 |
0.966 |
|
0 |
2.8 |
0 |
0 |
0 |
0 |
0 |
|
1 |
2.8 |
1.633 |
2.806 |
1.242 |
0.506 |
0.69 |
|
2 |
2.8 |
2,89 |
2.05 |
2.17 |
1.63 |
0,84 |
|
3 |
2.8 |
3.312 |
0.874 |
2.484 |
2.76 |
0.575 |
Для
знаходження кутової швидкості ланки переносимо вектор
переносимо вектор
 в т.В
плану механізму.
в т.В
плану механізму.
 (1.16)
(1.16)
Щоб
отримати кутову швидкість
 переносимо вектор
переносимо вектор
 в т.В
плану механізму.
в т.В
плану механізму.
 (1.17)
(1.17)
Щоб
отримати кутову швидкість
 переносимо вектор
переносимо вектор
 в т.D
плану механізму.
в т.D
плану механізму.
 (1.18)
(1.18)