

1. Способ замены плоскостей проекций
Сущность способа
состоит в том, что одну из заданных
плоскостей проекций (П1
или П2)
заменяют новой плоскостью П4.
При этом положение второй плоскости
проекций и заданных геометрических
фигур остается неизменным. Новая
плоскость проекций П4
выбирается с таким расчетом, чтобы она
занимала частное положение по отношению
к рассматриваемой геометрической фигуре
и была при этом перпендикулярной к
незаменяемой плоскости проекций. Таким
образом, исходная (старая) система
плоскостей проекций П2/П1
может быть преобразована в новую систему
П2/
П4
при замене плоскости П1
плоскостью П4
![]() П2
или в систему П4/П1
при замене плоскости П2
плоскостью П4
П2
или в систему П4/П1
при замене плоскости П2
плоскостью П4![]() П1.
Каждая из этих полученных систем может
быть преобразована в новую путем замены
плоскости проекций, не заменявшейся в
предыдущем преобразовании. Таким
образом, система П2/
П4
может быть преобразована в систему
П5/П4
при замене плоскости П2
плоскостью П5
П1.
Каждая из этих полученных систем может
быть преобразована в новую путем замены
плоскости проекций, не заменявшейся в
предыдущем преобразовании. Таким
образом, система П2/
П4
может быть преобразована в систему
П5/П4
при замене плоскости П2
плоскостью П5
![]() П4,
а система П4/П1
- в систему П4/П5
- при замене плоскости П1
плоскостью
П5
П4,
а система П4/П1
- в систему П4/П5
- при замене плоскости П1
плоскостью
П5![]() П4
и т. д.
Такое последовательное
преобразование исходной системы
плоскостей проекций позволяет получить
новую систему, в которой рассматриваемые
геометрические фигуры окажутся в
наивыгоднейшем положении относительно
плоскостей проекций. Большинство задач
решается с применением одного или двух
последовательных преобразований
исходной системы плоскостей проекций.
Одновременно можно заменять только
одну плоскость проекций П1
(или П2),
другая плоскость П2
(или П1)
должна оставаться неизменной.
Все
свойства геометрических фигур и их
изображений, ранее рассмотренные в
исходной П2/П1
системе, справедливы и для новой системы
плоскостей проекций.
Каждая новая
плоскость проекций П4,
П5,
... условно называется так же, как та из
основных, которую она заменяет. Так,
например, плоскость П4,
заменяющая горизонтальную плоскость
П1,
условно называется также "горизонтальной",
хотя она не занимает горизонтального
положения в пространстве.
Рассмотрим
инварианты преобразования, позволяющие
по чертежу объекта, выполненному в
старой системе, построить чертеж в новой
системе плоскостей проекций.
П4
и т. д.
Такое последовательное
преобразование исходной системы
плоскостей проекций позволяет получить
новую систему, в которой рассматриваемые
геометрические фигуры окажутся в
наивыгоднейшем положении относительно
плоскостей проекций. Большинство задач
решается с применением одного или двух
последовательных преобразований
исходной системы плоскостей проекций.
Одновременно можно заменять только
одну плоскость проекций П1
(или П2),
другая плоскость П2
(или П1)
должна оставаться неизменной.
Все
свойства геометрических фигур и их
изображений, ранее рассмотренные в
исходной П2/П1
системе, справедливы и для новой системы
плоскостей проекций.
Каждая новая
плоскость проекций П4,
П5,
... условно называется так же, как та из
основных, которую она заменяет. Так,
например, плоскость П4,
заменяющая горизонтальную плоскость
П1,
условно называется также "горизонтальной",
хотя она не занимает горизонтального
положения в пространстве.
Рассмотрим
инварианты преобразования, позволяющие
по чертежу объекта, выполненному в
старой системе, построить чертеж в новой
системе плоскостей проекций.
Замена фронтальной плоскости проекций (преобразование системы п2/п1 в систему п4/п1)
Исходная (старая)
система плоскостей проекций П2/П1,
точка А пространства, ее ортогональные,
проекции А1
и А2,
изображены на рис. 3.2.
Р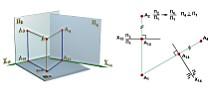 ис.
3.2
ис.
3.2
Заменим фронтальную
плоскость проекций П2,
новой плоскостью П4
(которую условно будем называть тоже
фронтальной), перпендикулярной к П1,
и образующей с плоскостью П2
некоторый угол (в случае проецирования
точки этот угол произволен). В результате
получим новую систему плоскостей
проекций П4/П1.
Плоскость П1
является общей для старой и новой систем
плоскостей проекций.
В новой системе
П4/П1
имеем: X14
= П1
![]() П4
- новая ось проекций, А1
и А4
- ортогональные проекции точки А.
При
переходе от старой системы П2/П1
к новой П4/П1
остаются неизменными (являются
инвариантами преобразования): 1) плоскость
П1
и точка А; 2) горизонтальная проекция
А1,
точки А; 3) расстояние точки А до плоскости
П1,
т. е. | AA1
| = | A2A12
| = | A4A14
|.
На динамическом рисунке 3.3 показан
механизм рассмотренного проекционного
преобразования.
Р
П4
- новая ось проекций, А1
и А4
- ортогональные проекции точки А.
При
переходе от старой системы П2/П1
к новой П4/П1
остаются неизменными (являются
инвариантами преобразования): 1) плоскость
П1
и точка А; 2) горизонтальная проекция
А1,
точки А; 3) расстояние точки А до плоскости
П1,
т. е. | AA1
| = | A2A12
| = | A4A14
|.
На динамическом рисунке 3.3 показан
механизм рассмотренного проекционного
преобразования.
Р ис.
3.3 (анимационный)
ис.
3.3 (анимационный)
Выявленные инварианты преобразования позволяют построить по комплексному чертежу точки в старой системе плоскостей проекций ее комплексный чертеж в повой системе. Для этого на комплексном чертеже точки А (А1,А2) проводим новую ось проекций х14 (рис. 3.2), положение которой определяется положением новой фронтальной плоскости проекций П4. Из точки А1 проводим линию связи, перпендикулярную новой оси проекций х14. На линии связи от точки А14 откладываем отрезок | А14А4 | = | А12А2 |. Полученная таким образом точка А4 является проекцией точки А на плоскость П4. В новой системе плоскостей проекций П4/П1 положение точки А определяется проекциями А1 и А4.