

Линейные динамические системы.
В общем, виде линейную динамическую систему можно описать с помощью дифференциального уравнения, определяющего связь между входной величиной x(t) и выходной y(t). Это уравнение будет иметь вид:
![]()
![]() -
постоянные величины, характеризующие
параметры звена. Коэффициенты
-
постоянные величины, характеризующие
параметры звена. Коэффициенты
![]() - константы, определяющие параметры
входного сигнала.
- константы, определяющие параметры
входного сигнала.
Задавая различные выражения для входного сигнала по уравнению [7], можно определить выходной сигнал y(t), при этом должно быть задано n начальных условий.
![]()
Запишем уравнение установившегося состояния или статическую характеристику элемента. Определить все свойства исследуемого элемента и его переходный процесс можно, решив дифференциальное уравнение [7].
Методы решения.
1. Аналитический – в этом случае решение дифференциального уравнения ищется в общем виде.
2. Численный – в этом случае в общем виде решение не получают, а получают численное значение для заданных входных параметров.
3. Качественный – в этом случае решения уравнения не получают, а определяют некоторые требуемые его свойства.
При аналитическом методе решения уравнения, решение получают в виде:
![]() ,
,
где
![]() -представляет
собой решение однородного дифференциального
уравнения [8].
-представляет
собой решение однородного дифференциального
уравнения [8].
![]()
![]() -
частное решение неоднородного уравнения
[7].
-
частное решение неоднородного уравнения
[7].
Общее решение однородного дифференциального уравнения [8] можно представить в виде:
![]()
где
![]() - некоторые коэффициенты, определяемые
из начальных условий, а pi
– корни характеристического уравнения
[9].
- некоторые коэффициенты, определяемые
из начальных условий, а pi
– корни характеристического уравнения
[9].
![]()
Частное решение уравнения [7] будет зависеть от свойств и вида входного сигнала.
Определить корни характеристического уравнения порядка выше 3 практически невозможно, поэтому для получения аналитических зависимостей выходного сигнала от входного используют операторные методы, основанные на преобразовании Лапласа. В этом случае используется понятие передаточной функции элемента или системы.
Передаточная функция системы.
Рассмотрим некоторый элемент или систему, на вход которой подали сигнал «x», а на выходе получили «y».

Передаточной функцией системы или элемента называют отношение выходной величины к входной при нулевых начальных условиях.
![]()
Передаточная функция может быть записана в 4 формах:
1. операторная.
2. стандартная.
3. в форме изображений по Лапласу.
4. частотная.
Операторная форма записи передаточной функции.
Введем
в уравнение [7] оператор дифференцирования
«р»
![]() ,
тогда [7] примет вид:
,
тогда [7] примет вид:
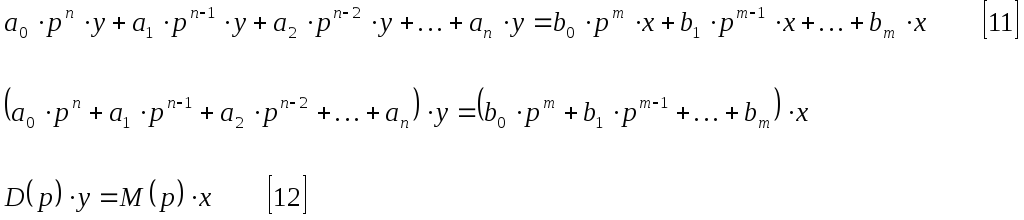
D(p)
– характеристический многочлен, а
![]() - характеристическое уравнение.
- характеристическое уравнение.
Используя [12], определим передаточную функцию элемента:

Полученное выражение для передаточной функции называется операторной формой записи передаточной функции.
Стандартная форма записи передаточной функции.
Преобразуем [13] к виду:

это стандартная форма записи передаточной функции.
Величина
![]() называется коэффициентом передачи
системы,
называется коэффициентом передачи
системы,
Величины

- постоянные времени. Тогда [14] примет вид:

Передаточная функция в форме изображений по Лапласу.
Для получения передаточной функции в форме изображений по Лапласу используют преобразования, приводящие функцию действительного аргумента t в функцию мнимого переменного р.
![]() -
преобразование Лапласа
-
преобразование Лапласа
![]()
Рассмотрим уравнение [7]. Преобразуем функцию y(t) по Лапласу.
![]()

Для правой части [7] можно получить, что:

Подставляя в [7], получим:


обратное преобразование Лапласа преобразует функцию комплексного переменного р в функцию действительного переменного t.
![]()
Свойства:
1).
![]()
![]()
2).
Если
![]() ,
,![]() ,
то:
,
то:
![]()
3).
![]()
4).
если оригинал смещается на некоторую
величину
![]() , причем
, причем![]() и
и![]() ,
то смещенная функция примет вид:
,
то смещенная функция примет вид:
![]() .
.
5). Если изображение смещается на р0, то оно соответственно будет равно:.
![]()
6). Произведение 2 изображений равно:
![]()
7).
![]()
![]()
8).
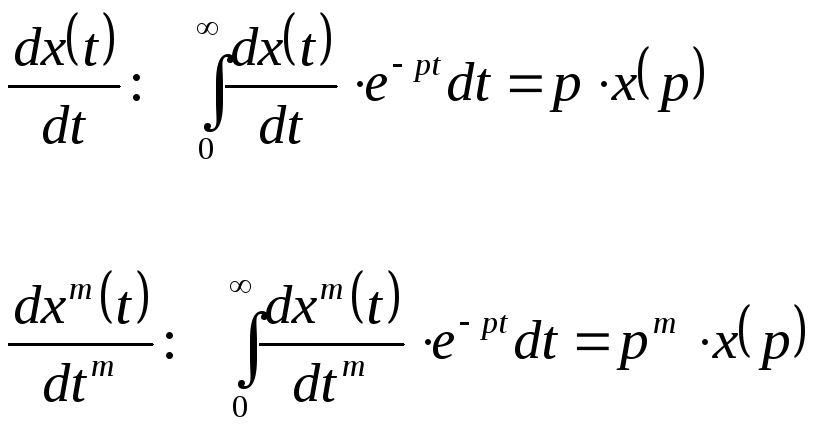
Свойство дифференцирования. Если
![]() иf(t)
непрерывно дифференцируема, то производная
порядка n
будет равна:
иf(t)
непрерывно дифференцируема, то производная
порядка n
будет равна:
![]()
9). Свойство интегрирования.
![]()