

Классификация сау.
Все САУ можно разделить на:
1. линейные и нелинейные.
Линейные системы – это системы, которые можно описать с помощью линейных уравнений.
Нелинейные системы – это системы, которые можно описать с помощью нелинейных уравнений.
2. непрерывные и дискретные.
Непрерывные системы – это системы, состояние которых задано на непрерывном множестве. Эти системы описываются с помощью алгебраических, дифференциальных, интегральных уравнений.
Для дискретных систем характерно наличие дискретных или импульсных элементов. При математическом описании таких систем используются конечно-разностные уравнения.
3. стационарные и нестационарные.
Стационарные системы описываются с помощью уравнений с постоянными коэффициентами.
4. с распределенными и с сосредоточенными параметрами.
Для описания систем с сосредоточенными параметрами используются обыкновенные дифференциальные уравнения; с распределенными – дифференциальные уравнения с частными производными.
5. детерминированные и стохастические.
Детерминированные системы – это системы, в которых отсутствуют случайные воздействия, и в этом случае в каждый момент времени есть только одно значение выходной величины; в стохастических системах, то есть в системах с наличием случайных воздействий выходная величина в каждый момент времени может принимать несколько различных значений.
6. статические и динамические.
Статические системы описываются однородными уравнениями, а динамические – неоднородными.
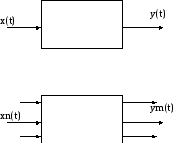
7. Одномерные и многомерные.
Одномерные системы – это системы с одним входом и одним выходом.
Многомерные системы – это системы, которые могут иметь много входов и много выходов.
Вопросы для самоконтроля.
1 Охарактеризуйте способы математического описании систем управления.
2 Назовите типы воздействий на систему, чем они характеризуются.
3 По каким признакам можно классифицировать системы автоматического управления.
4 Чем статические системы отличаются от динамических систем.
5 В чем особенности детерминированных и стохастических систем.
6 Назовите отличительные признаки дискретных и непрерывных систем
Лекция 2. Математические модели динамических систем.
Цель. Изучение математических моделей динамических систем.
Задачи:
Изучить математические модели линейных динамических систем
Изучить математические модели нелинейных динамических систем.
Изучить понятие и формы записи передаточной функции.
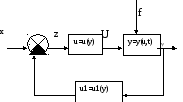
На первом этапе составления математической модели системы составляется функциональная схема системы, представляющая собой набор блоков, в которых записывается наименование элементов системы.
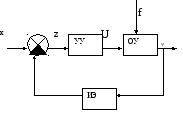
По функциональной схеме составляется структурная схема, представляющая собой набор блоков, внутри которых записывается функциональная зависимость между входом и выходом этого элемента.
Определение.
Уравнения, описывающие изменяющееся во времени состояния системы, называются уравнениями динамики.
Линеаризация.
При математическом описании и исследовании систем используются линейные уравнения. Для описания нелинейных систем используются нелинейные уравнения. При исследовании таких систем исходные нелинейные уравнения заменяются приближенными линейными.
Рассмотрим метод малых отклонений.
Пусть некоторый элемент описывается нелинейным дифференциальным уравнением вида:
![]()
Обозначим
невозмущенное состояние через
![]() ,
а малые отклонения через
,
а малые отклонения через![]() ,
тогда входной сигнал нашей системы
будет иметь вид:
,
тогда входной сигнал нашей системы
будет иметь вид:![]() ,
а выходной -
,
а выходной -![]() .
.
Рассмотрим левую часть уравнения:
![]()
Правая
часть уравнения [1] – нелинейная функция.
Разложим ее в ряд Тейлора в окрестности
точки
![]() ,
являющейся точкой установившегося
состояния. В результате получим:
,
являющейся точкой установившегося
состояния. В результате получим:

В
случае малых отклонений остаточным
членом ![]() можно пренебречь.
Подставим [2] и [3] в [1].
можно пренебречь.
Подставим [2] и [3] в [1].

Обозначим:
Тогда [4] примет вид:
![]()
В
том случае, когда отклонения
![]() равны
0, то есть система находится в невозмущенном
состоянии [5] примет вид:
равны
0, то есть система находится в невозмущенном
состоянии [5] примет вид:
![]()
Вычитая [6] из [5] получим уравнения в приращениях, являющиеся линейными:
![]() .
.