

1. Кинематика точки
1.1 Способы задания движения точки.
1.1.1 Векторный способ задания движения точки.
Определение скорости и ускорения точки.
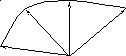
Положение точки в пространстве однозначно
определяется заданием радиуса-вектора
![]() ,
проведённого из некоторого неподвижного
центра О в данную точку М (рисунок 1.1).
,
проведённого из некоторого неподвижного
центра О в данную точку М (рисунок 1.1).
При движении точки М вектор
![]() будет изменяться с течением времени и
по модулю, и по направлению. Следовательно,
будет изменяться с течением времени и
по модулю, и по направлению. Следовательно,
![]() является переменным вектором, зависящим
от времени, т.е.
является переменным вектором, зависящим
от времени, т.е.
![]() =
=
![]() (t) (1.1)
(t) (1.1)
М2
 М1
М3
М1
М3
![]()
![]()
![]()
М0
![]() 0
0
Рисунок 1.1
Равенство (1.1) и является законом
движения точки в векторной форме, так
как оно позволяет в любой момент времени
построить вектор
![]() и найти положение движущейся точки.
и найти положение движущейся точки.
Геометрическое место концов вектора
![]() ,
т.е. годограф этого вектора, определяет
траекторию движущейся точки, т. е. линию,
которую описывает точка при движении.
,
т.е. годограф этого вектора, определяет
траекторию движущейся точки, т. е. линию,
которую описывает точка при движении.
Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки - эта величина характеризует быстроту изменения вектора перемещения точки.
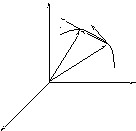
Определение скорости точки
Пусть движущаяся точка в момент времени t находится в положении М, а в момент времени t1 приходит в положение М1 (рисунок 1.2)
 z
z
![]() м1
м1
![]()
м
![]()
![]()
 r
r
o y
х
Рисунок 1.2
Тогда перемещение точки за промежуток времени t = t1 – t определяется вектором ММ1, который называется вектором перемещения точки, т. е. вектор перемещения – это вектор, проведённый из начального положения точки в конечное.
![]() =
=
![]() –
–
![]() =
=
![]() (1.2)
(1.2)
Отношение вектора перемещения точки к соответствующему промежутку времени равно векторной величине средней по модулю и направлению, называемой средней скоростью точки за промежуток времени t.
![]() ,
,
![]() (1.3)
(1.3)
Направлен вектор
![]() также как вектор
также как вектор
![]() ,
т.е. вдоль хорды ММ1 в сторону
движения точки.
,
т.е. вдоль хорды ММ1 в сторону
движения точки.
Очевидно, чем меньше промежуток времени t, тем точнее будет вычисление величины.
Чтобы получить точную характеристику движения вводят понятие скорости точки в данный момент времени, которую называют мгновенной скоростью
![]() (1.4)
(1.4)
Размерность скорости м/с.
Таким образом, вектор скорости точки в данный момент времени равен первой производной от радиуса – вектора точки по времени.
Вектор мгновенной скорости
![]() направлен по касательной к
траектории точки в сторону её движения.
направлен по касательной к
траектории точки в сторону её движения.
При прямолинейном движении вектор
скорости
![]() всегда направлен вдоль прямой, по которой
движется точка, и может изменяться
только по величине; при криволинейном
движении вектор скорости изменяется и
по величине, и по направлению.
всегда направлен вдоль прямой, по которой
движется точка, и может изменяться
только по величине; при криволинейном
движении вектор скорости изменяется и
по величине, и по направлению.