

2. Основные аксиомы статики
В основе учения о равновесии абсолютно твердых тел лежат некоторые простые положения, которые являются постулатами или аксиомами статики. Эти аксиомы выражают те основные факты, которые дают нам опыт и наблюдения при изучении действия сил на твердое тело.
-
Если на свободное абсолютно твердое тело действуют две силы, то тело может находится в равновесии тогда и только тогда, когда эти силы равны по модулю
 и направлены вдоль одной прямой в
противоположные стороны. (рисунок 2.1)
и направлены вдоль одной прямой в
противоположные стороны. (рисунок 2.1)
A


![]()
![]()
F


B
Рисунок 2.1![]() Рисунок 2.2
Рисунок 2.2
-
Действие данной системы сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил. Следствие: действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль линии ее действия в любую другую точку тела (Рисунок 2.2).
-
З
 акон
параллелограмма сил: две силы, приложенные
к телу в одной точке, имеют равнодействующую,
равную геометрической (векторной) сумме
этих сил и приложенную в той же точке
(рисунок 2.3).
акон
параллелограмма сил: две силы, приложенные
к телу в одной точке, имеют равнодействующую,
равную геометрической (векторной) сумме
этих сил и приложенную в той же точке
(рисунок 2.3).
![]()
Вектор
![]() ,
равный диагонали параллелограмма,
построенного на векторах
,
равный диагонали параллелограмма,
построенного на векторах
![]() и
и
![]() (рисунок 2.3) называется геометрической
суммой векторов
(рисунок 2.3) называется геометрической
суммой векторов
![]() и
и
![]() .
.
-
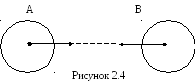
Закон действия и противодействия: силы, с которыми действуют друг на друга два тела всегда равны по модулю и направлены по одной прямой в противоположные стороны. Этот закон является одним из основных законов механики. Из него следует, что если тело А действует на тело В с некоторой силой
 ,
то одновременно тело В действует на
тело А с такой же по модулю и направленной
вдоль той же прямой, но в противоположную
сторону силой
,
то одновременно тело В действует на
тело А с такой же по модулю и направленной
вдоль той же прямой, но в противоположную
сторону силой
 (Рисунок 2.4). Силы
(Рисунок 2.4). Силы
 и
и
 , как приложенные к разным телам, не
образуют уравновешенную систему сил.
, как приложенные к разным телам, не
образуют уравновешенную систему сил.
3. Связи и их реакции
По определению, тело, движение которого ограничено в каком-либо направлении, называется несвободным..
Все то, что ограничивает перемещение данного тела в пространстве, называется связью.
Примерами несвободных тел являются груз, лежащий на столе, дверь, подвешенная на петлях, и т.д. Связями в этих случаях будут: для груза – плоскость стола; не дающая перемещаться по вертикале вниз; для двери – петли, не позволяющие двери отойти от косяка.
Тело, стремясь под действием приложенных сил осуществить перемещение, которому препятствует связь, будет действовать на нее с некоторой силой, называемой силой давления на связь.
Сила, с которой данная связь действует на тело, препятствуя его перемещениям, называется реакцией связи.
Реакция связи направлена противоположно тому направлению, куда тело перемещаться не может.
Правильное определение направлений реакций связей играет при решении задач важную роль. Рассмотрим, как направлены реакции некоторых основных видов связей:
3.1 Гладкая плоскость (поверхность) или опора.
Гладкой называется поверхность, трением о которую можно пренебречь.
Р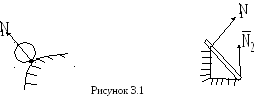 еакция
гладкой поверхности
еакция
гладкой поверхности
![]() направлена перпендикулярно к общей
поверхности соприкасающихся тел в точке
их касания и приложена в этой точке
(рисунок 3.1).
направлена перпендикулярно к общей
поверхности соприкасающихся тел в точке
их касания и приложена в этой точке
(рисунок 3.1).
3.2 Гибкая связь (нить, канат, цепь и т.д.)
Нить не дает телу М (Рисунок 3.2) удаляться
от точки подвеса А по направлению АМ,
поэтому реакция
![]() натянутой нити направлена вдоль нити
к точке ее подвеса.
натянутой нити направлена вдоль нити
к точке ее подвеса.


Рисунок 3.2
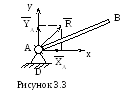
3.3 Цилиндрический шарнир
( или
подшипник) осуществляет такое соединение
двух тел, при котором одно тело может
вращаться по отношению к другому вокруг
общей оси, называемой осью шарнира.
Реакция
или
подшипник) осуществляет такое соединение
двух тел, при котором одно тело может
вращаться по отношению к другому вокруг
общей оси, называемой осью шарнира.
Реакция
![]() шарнира может иметь любое направление
в плоскости, перпендикулярной оси
шарнира. Для силы
шарнира может иметь любое направление
в плоскости, перпендикулярной оси
шарнира. Для силы
![]() неизвестны ни ее модуль, ни направление,
поэтому определяют ее проекции на оси
неизвестны ни ее модуль, ни направление,
поэтому определяют ее проекции на оси
![]() и
и
![]() и
и![]() ( Рисунок 3.3). Тело АВ прикреплено с
помощью шарнира А к неподвижной опоре
D.
( Рисунок 3.3). Тело АВ прикреплено с
помощью шарнира А к неподвижной опоре
D.
3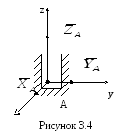 .4
Сферический шарнир (подпятник).
.4
Сферический шарнир (подпятник).
Т
x![]() сферического шарнира может иметь любое
направление в пространстве (неизвестны
ни ее модуль, ни ее направление), поэтому
определяют ее проекции на оси X,
Y, Z, -
сферического шарнира может иметь любое
направление в пространстве (неизвестны
ни ее модуль, ни ее направление), поэтому
определяют ее проекции на оси X,
Y, Z, -
![]() (Рисунок 3.4):
(Рисунок 3.4):
3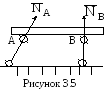 .5
Невесомый стержень
.5
Невесомый стержень
(Его весом по сравнению с воспринимаемой им нагрузкой пренебрегают). рисунок 3.5
Реакция
![]() такого стержня направлена вдоль оси
стержня.
такого стержня направлена вдоль оси
стержня.
При решении задач реакции связей обычно являются неизвестными, определив их, тем самым определяют по закону действия и противодействия и силы давления на связи, рассчитывают прочность соответствующих частей конструкций.