

Лекція 13. Управління системами. Сау та асу тп
Термін “управління” використовується скрізь, де є вплив людини на зовнішнє середовище. Під управлінням розуміють цілеспрямований вплив на об’єкт чи систему з метою зміни її функціонування, властивостей чи параметрів. В рідкісних випадках управління передбачає фізичний вплив (сортування деталей машин у відділі ТК), але частіше вплив має інформаційний характер. Теорія керування системами і об’єктами – значний за обсягами розділ науки, яким займаються системні аналітики.
Всі існуючи в світі системи управління поділяються, насамперед, за своєю природою. Виділяють наступні класи:
-
Технічні системи – як об’єкт управління, так і система управління є штучними елементами, виготовленими людьми.
-
Біологічні системи – повна протилежність технічним – всі їх елементи створені самою природою.
-
Біотехнічні системи – комбінація об’єкту живої природи і технічної системи керування (штучне серце, система поливу полів), або навпаки – технічний об’єкт і біологічна система керування (поки що фантастика).
-
Антропологічні системи – включають в себе виключно людей, направлені на управління процесами людської діяльності (футбольна команда).
-
Антропотехнічні системи – одним з елементів є людина, іншим – технічна система. Коли людина керує системою і без неї технічна система працювати не може – це 19 сторіччя, коли навпаки – технічна система керує людьми – це страшна фантастика.
-
Організаційні системи – також не містить інших елементів крім людей, але об’єктами керування, а іноді й системами управління є не окремі люди, а їх великі групи (колективи, народи, соціальні групи).
-
Екологічні системи – відрізняються від усіх попередніх тим, що об’єктом управління є процес взаємодії людини або технічної системи з природою. При цьому система керування може бути як технічною, так і природною.
В теорії управління виділяють 3 основні напрямки:
-
технічний;
-
психолого-педагогічний;
-
соціально-економічний.
Результатами досліджень у всіх трьох напрямках є досить докладні і об’ємні теорія систем автоматичного управління (САУ) та теорія автоматизованих систем управління технологічними процесами (АСУ ТП). Теорія САУ (в іншій літературі просто теорія автоматизованого управління – ТАУ) найбільш поширена в технічних системах, адже передбачає, що об’єкти управляння добре описані і визначені. Теорія АСУ ТП більш поширена як в технічному управлінні, так і в психолого-педагогічному, і в соціально-економічному, оскільки може оперувати з невизначеними і слабко формалізованими об’єктами.
До числа основних задач управління, відносяться (в порядку зростання складності):
-
задача підтримки заданого стану
 ,
,
 ;
; -
задача підтримання певного процесу в часі
 ,
,
 ,
,
 ;
; -
задача зміни стану з одного заданого на інший
 ,
,
 ;
; -
задача зміни процесу з одного на інший
 ,
,
 ,
,
 ;
; -
задача організації певної поведінки, коли множина одних станів змінюється множиною інших і водночас декілька процесів змінюються іншими процесами
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
З точки зору математики рішення будь-якої задачі управління – це зменшення ентропії системи, тобто обмеження множини можливих станів системи або можливих процесів у ній певним бажаним станом чи процесом. Звичайно, що результатом управління повинно бути зменшення ймовірності настання небажаного стану системи та часу перебування системи в такому стані.
Серед усіх можливих станів системи виділяють так звані оптимальні стани. Про них говорять, коли той чи інший показник діяльності системи (критерій), або їх група досягають свого екстремуму (оптимуму). Системи управління, що налагоджуються на пошук і забезпечення таких оптимальних станів називаються системами оптимального керування.
С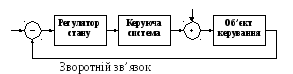 клад
типової системи автоматичного управління
(САУ) представлений на наступній схемі.
клад
типової системи автоматичного управління
(САУ) представлений на наступній схемі.
Поруч
з регулятором, керуючою системою і
об’єктом управління вона завжди містить
зворотній зв’язок, який показує,
наскільки бажаний стан
![]() співпадає з реальним станом
співпадає з реальним станом
![]() або навпаки. Також на схемі можна помітити
головний фактор, чому ці речі в реальних
системах частіше за все не співпадають
– випадковий вплив зовнішнього середовища
або навпаки. Також на схемі можна помітити
головний фактор, чому ці речі в реальних
системах частіше за все не співпадають
– випадковий вплив зовнішнього середовища
![]() .
Цей вплив частіше за все називають
перешкодою
або небажаним
відхиленням.
Більшість існуючих систем управління
побудовані з метою компенсації впливу
на роботу певного об’єкту чи системи
небажаних відхилень.
.
Цей вплив частіше за все називають
перешкодою
або небажаним
відхиленням.
Більшість існуючих систем управління
побудовані з метою компенсації впливу
на роботу певного об’єкту чи системи
небажаних відхилень.
Робота АСУ ТП набагато складніша. Вони передбачають не просто забезпечення певного стану системи чи процесу її роботи, а частіше за все, передбачають синтез рішень стосовно управління технологічним процесом, які не є запрограмованими. До того ж, ці рішення можуть стосуватися як роботи технічних систем, так і людської поведінки, а ситуації, які виникають можуть бути елементами множини можливих станів або непередбаченим заздалегідь.