

Лекція 9. Моделювання систем
Основою вивчення і моделювання процесів знаходиться експеримент – реальний або логічний. При реальному експерименті вивчаються властивості тої чи іншої системи в ході безпосереднього спостереження за нею. В логічному експерименті досліджують властивості математичної чи імітаційної моделі, яка ізоморфна об’єкту.
Б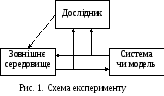 удь-який
експеримент виконується за схемою,
представленою на рис. 1. До неї входять
три обов’язкових елементи: дослідник,
об’єкт дослідження - система або
модель та зовнішнє середовище. До
останнього відносяться будь-які об’єкти,
явища та фактори, що мають той чи інший
вплив на систему як цілеспрямований,
так і випадковий.
удь-який
експеримент виконується за схемою,
представленою на рис. 1. До неї входять
три обов’язкових елементи: дослідник,
об’єкт дослідження - система або
модель та зовнішнє середовище. До
останнього відносяться будь-які об’єкти,
явища та фактори, що мають той чи інший
вплив на систему як цілеспрямований,
так і випадковий.
Дослідник може пасивно спостерігати за впливом на систему зовнішнього середовища і реакціями системи, не проявляючи своєї наявності. Такий експеримент називається пасивним. Якщо ж дослідник починає корегувати зовнішній вплив, задаючи інтенсивність, порядок та величини вхідних сигналів, такий експеримент називається активний. Сьогодні пасивний експеримент поширений в соціальних та природничих науках, а також при дослідженні маловідомих і унікальних об’єктів, активний вплив на які може призвести до небажаних наслідків. В техніці та економіці більш поширений активний експеримент, оскільки системи та моделі, що досліджуються є відкритими активними системами, тобто потребують для свого вдалого функціонування певних зовнішніх впливів.
Функціонування системи завжди
розглядається на певному, скінченому
проміжку часу
![]() .
На ньому в певному вигляді може бути
сформульовано опис потоку зовнішнього
впливу (як множина значень, часова
функція, інтервальна дискретна функція
тощо)
.
На ньому в певному вигляді може бути
сформульовано опис потоку зовнішнього
впливу (як множина значень, часова
функція, інтервальна дискретна функція
тощо)
![]() .
В ході проведення експерименту дослідників
цікавить реакція системи на той або
інший вхідний вплив
.
В ході проведення експерименту дослідників
цікавить реакція системи на той або
інший вхідний вплив
![]() .
Найбільш простою моделлю функціонування
системи може бути рівняння “вхід-вихід”,
яке пов’язує певний набір значень
вхідного і вихідного процесів.
.
Найбільш простою моделлю функціонування
системи може бути рівняння “вхід-вихід”,
яке пов’язує певний набір значень
вхідного і вихідного процесів.
![]() (1)
(1)
Таке рівняння не враховує попереднього функціонування системи, а також можливість наявності внутрішніх факторів, які впливають на вихід системи.
Врахування таких факторів при моделюванні
систем виконується за рахунок так званих
змінних стану
![]() .
Введення цих змінних дозволяє пояснити
чому одна й та сама система може реагувати
на однакові вхідні величини по-різному.
Урахування змінних стану дозволяє
вивести більш складну модель функціонування
системи, ніж “вхід-вихід”. Ця модель
побудована на операторі виходу та
операторі стану.
.
Введення цих змінних дозволяє пояснити
чому одна й та сама система може реагувати
на однакові вхідні величини по-різному.
Урахування змінних стану дозволяє
вивести більш складну модель функціонування
системи, ніж “вхід-вихід”. Ця модель
побудована на операторі виходу та
операторі стану.
![]() (2)
(2)
![]() (3)
(3)
Оператор виходу G пов’язує вихід системи з поточними значеннями часу, внутрішнього стану та входу системи. Оператор стану H пов’язує поточний стан системи з поточними ж значеннями часу та входу системи і попереднім значенням її стану. Простіше кажучи, оператор виходу є модифікацією моделі “вхід-вихід”, як враховує внутрішній стан системи, а оператор стану – дозволяє дізнатися яким буде наступний стан системи якщо вона знаходиться в поточному стані і на вході має місце вплив.
Оператори виходу та внутрішнього стану мають загальну властивість: вони не залежать від значення часу, тобто в будь-який момент можна спрогнозувати наступні значення виходу і внутрішнього стану системи, користуючись виключно поточними значеннями, а не історією поведінки системи. Оператори G та H можуть бути записані для певного об’єкта чи системи сумісно у вигляді так званої таблиці переходів-виходів. Приклад – завдання скінченого автомату в дискретній математиці.
Все викладене досі передбачає, що є одна вхідна змінна, один внутрішній стан та одна вихідні змінна. В реальності таких систем не існує. В загальному випадку вхідним впливом називають множину припустимих значень на усіх входах систем, а виходом – множину значень на виході. Якщо розмірність цих множин відома заздалегідь, зручно представляти вхід або вихід вектором такої розмірності, що складається з цілих, дійсних, або логічних компонентів. Кожен з елементів такого вектора називається відповідно вхідною чи вихідною координатою або окремим виміром.
Далеко не завжди області припустимих значень по окремих координатах в добутку дають область припустимих значень для всієї системи, оскільки для реальних фізичних систем можливі стани, які не можуть бути реалізовані в тій чи іншій комбінації вхідних координат. Вважають, що модель функціонування багатокоординатної (багатовимірної) системи задана, коли визначені припустимі діапазони вхідних та вихідних координат, часу, внутрішніх станів та задані багатовимірні оператори виходу та стану. Система вважається описаною лише в межах цих діапазонів.
![]() (4)
(4)
Наприклад: робота і рух автомобіля розглядається при швидкості від 0 до 250 км на годину і нахилі поверхні не більше 20 градусів. Коли функціонування такої системи відбувається поза описаними умовами, воно не відповідає традиційній моделі, отже відбувається за іншими законами.