

3.5. Модуляция в цифровых системах мобильной связи
Историческое развитие средств мобильной связи вплоть до 1990-х гг. опиралось на использование аналоговых методов модуляции. Однако уже задолго до окончания эры стандартов первого поколения стала очевидна бесперспективность таких методов. И если для передачи речевых сообщений еще использовалась качественная ЧМ, то уже для передачи служебной информации – цифровой по своей природе – использовались методы цифровой модуляции. В настоящее время наряду с появлением эффективных методов множественного доступа, сжатия информации, помехоустойчивого кодирования, а главное – недорогими и удобными устройствами их реализации, методы цифровой модуляции в мобильной связи давно и прочно вытеснили своих аналоговых предшественников.
При передаче цифровой информации по каналам связи главной задачей модулятора является отображение цифровой информации – последовательности двоичных символов, представленной на рис. 3.5 – на форму физических переносчиков информации посредством изменения значений их параметров. Поскольку такое изменение, как правило, оказывается дискретным, то термин “модуляция” заменяют термином “манипуляция”. Если для передачи информации имеется M возможных значений физических параметров, то указанное отображение осуществляется посредством выбора набора из K = log2M двоичных символов и его сопоставления одной из M = 2K форм, каждая из которых определяется конкретными значениями параметров сигналов, имеющих определенную энергию.
3.5.1. Фазовая манипуляция
Простейшим случаем цифровой модуляции является двоичная фазовая манипуляция (ФМ-2) (BPSK, Binary Phase Shift Keying), при которой для передачи любого из двух двоичных символов 0 или 1 используется два значения начальной фазы отрезка гармонического колебания на интервале [0; T]:
![]() ;
;
![]() . (3.52)
. (3.52)
Сигналы ФМ-2, являясь противоположными сигналами, обладают наилучшей (потенциальной) помехоустойчивостью, т.е. при заданном отношении сигнал/шум имеют наименьшую вероятность ошибочного приема, однако ее достижение возможно лишь в таких приемных устройствах, в которых обеспечивается постоянство фазы опорного колебания, например, путем применения сложных систем фазовой автоподстройки частоты (ФАПЧ).
Попытки принимать сигналы ФМ-2 на достаточно простые приемники чреваты тем, что в произвольный момент времени под влиянием любых флуктуаций даже в отсутствии внешней помехи возможен скачок фазы на π в устройстве получения опорного колебания, который приведет к возникновению потока ошибочных решений вплоть до следующего скачка фазы.
|
Передаваемые символы |
…0110▼100011011101▼▼011… |
|
Начальные фазы передаваемых сигналов |
…0ππ0▼π000ππ0πππ0π▼▼0ππ… |
|
Решение приемника о начальных фазах принятых сигналов |
…0πππ▼0πππ00π000ππ▼▼0ππ… |
|
Решение приемника о принятых символах |
…0111▼011100100010▼▼011… |
|
Рис. 3.16. Возникновение пакета ошибок при ФМ-2 |
|
На рис. 3.16 приведены последовательности передаваемых символов, начальные фазы передаваемых сигналов, решения приемника о начальных фазах сигналов и, наконец, решения приемника относительно переданных символов. Если при приеме четвертого сигнала (помеченного знаком ▼) в приемнике происходит скачок π в фазе опорного колебания, то это приводит к потоку ошибочных решений (подчеркнутые символы) вплоть до того момента, когда не произойдет повторный скачок фазы (помечено ▼▼).
Указанный недостаток удается преодолеть при использовании относительной фазовой манипуляции (ОФМ) (DQPSK, Differential Binary Phase Shift Keying), заключающийся в том, что информация содержится не в абсолютном значении начальных фаз, а в разности начальных фаз двух соседних сигналов.
Например, для передачи символа 0 начальная фаза на текущем тактовом интервале остается неизменной по отношению к предыдущему интервалу, а для передачи символа 1 происходит смена начальной фазы колебания на π. Такое же правило (скачок фазы или его отсутствие) используется в приемнике для выноса решения о переданном символе.
На рис. 3.17 приведена та же последовательность передаваемых символов, что и на рис. 3.16, начальные фазы сигналов с ОФМ и вынесенные в приемнике решения по начальным фазам сигнала и по символам. Видно, что ошибочные решения принимаются лишь в момент случайного скачка фазы без возникновения потока ошибок.
|
Передаваемые символы |
….…0110▼100011011101▼▼011… |
|
Начальные фазы передаваемых сигналов |
…(0)0π00▼ππππ0ππ0π00π▼▼π0π… |
|
Решение приемника о начальных фазах принятых сигналов |
…(0)0π0π▼0000π00π0ππ0▼▼π0 π … |
|
Решение приемника о принятых символах |
…….0111▼100011011101▼▼101… |
|
Рис. 3.17. Борьба с пакетами ошибок при использовании ОФМ |
|
Нетрудно определить цену энергетического проигрыша сигналов с ОФМ по сравнению с ФМ-2 [10]: она не превосходит 1 дБ, в то время как упрощение (удешевление) приемника оказывается существенным.
Заметим, что метод ОФМ можно рассматривать как традиционную систему ФМ-2 с дополнительным кодированием передаваемого сообщения. Пусть {ak} (k = 0, 1, 2, …) – исходный двоичный поток сообщений. Кодирование начинается с установки предопределенного первого бита последовательности b0. Далее последовательность закодированных бит {bk} формируется одним из двух эквивалентных способов:
![]() (3.53а)
(3.53а)
либо
![]() , (3.53б)
, (3.53б)
где символ
![]() означает сложение по модулю два.
означает сложение по модулю два.
Несмотря на то, что сигналы ФМ-2 обладают наилучшей помехоустойчивостью, они не обеспечивают высоких скоростей передачи информации, поскольку каждому значению сигнала ставится в соответствие только один информационный символ. Возможность существенного повышения скорости связана с использованием многопозиционных сигналов, когда значение какого-либо сигнального параметра на одном тактовом интервале отражает значение целого набора из M информационных символов.
Ансамбль многопозиционных сигналов обычно удается получить из соответствующих двоичных сигналов путем введения большей градации значений модуляционного параметра. Так, сигналы с многопозиционной фазовой манипуляцией (ФМ-M), каждый из которых имеет энергию E на интервале [0; T], представимы в виде
![]()
![]() ,
r = 1,
…, M, (3.54)
,
r = 1,
…, M, (3.54)
где функция A(t)
выбирается, исходя из требования к
спектральной эффективности, параметр
φr = 2π(r – 1)/M
определяет
M
возможных значений начальной фазы
отрезка гармонического колебания.
Полагая M = 2
и выбирая в качестве A(t)
прямоугольный импульс, получаем как
частный случай рассмотренные выше
сигналы ФМ-2, у которых амплитуда A0
равна
![]() .
.
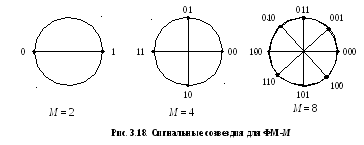
На рис. 3.18 показаны сигнальные диаграммы (созвездия) для сигналов с многопозиционной фазовой манипуляцией для некоторых значений M. Правило, по которому каждому набору из M = 2K информационных символов ставится в соответствие точка сигнального созвездия называется манипуляционном кодом. Обычно при формировании такого кода руководствуются основной идеей, заключающейся в том, что близко расположенные точки созвездия не должны сильно различаться своим манипуляционным кодом. В частности, для представленных сигнальных созвездий используется манипуляционный код Грея, при котором расположенные на окружности соседние точки различаются в одном двоичном символе. В этом случае наиболее вероятные ошибки, вызванные шумами, будут возникать только в одном разряде K-разрядного набора.
Сигналы с многопозиционной ФМ можно записать в квадратурном виде:
![]()
![]() , (3.55)
, (3.55)
т.е. как линейную комбинацию в базисе из двух ортонормированных сигналов
![]()
![]() , (3.56)
, (3.56)
где
![]() – энергия огибающей A(t),
а соответствующий двумерный сигнальный
вектор sr = [sr1
sr2]
имеет компоненты
– энергия огибающей A(t),
а соответствующий двумерный сигнальный
вектор sr = [sr1
sr2]
имеет компоненты
![]() ,
,
![]() . (3.57)
. (3.57)
Заметим, что если M = 2, то вторая компонента обнуляется, и сигнал становится одномерным (рис. 3.18).
Эвклидово расстояние между сигналами ФМ-M равно
![]() , (3.58)
, (3.58)
и его минимальное значение соответствует случаю, когда |m – k| = 1, т.е. соседним значениям фаз. При этом
![]() . (3.59)
. (3.59)
Широко используемым вариантом многопозиционной фазовой модуляции является четырехпозиционная, или квадратурная фазовая манипуляция ФМ-4 (КФМ), которая, с одной стороны, позволяет в два раза повысить скорость передачи информации, а с другой – обладает помехоустойчивостью, почти такой же, как и ФМ-2.
Формирование и прием сигналов с КФМ, как это следует из их названия, удобно производить квадратурным способом на основе подпоследовательностей четных и нечетных бит исходного сообщения [4]. При этом, если интервал, отводимый на передачу исходных бит равен T, то длительность бит в формируемых подпоследовательностях удваивается. Так, при формировании сигналов с КФМ из N-элементной последовательности с прямоугольной формой огибающей
![]() ,
,
![]() , (3.60)
, (3.60)
формируются подпоследовательности (рис. 3.19)
![]() (3.61а)
(3.61а)
и
![]() , (3.61б)
, (3.61б)
где, ради простоты, предполагается, что число (N – 1)/2 – целое.
|
|
|
Рис. 3.19. Формирование сигналов с КФМ и КФМС |
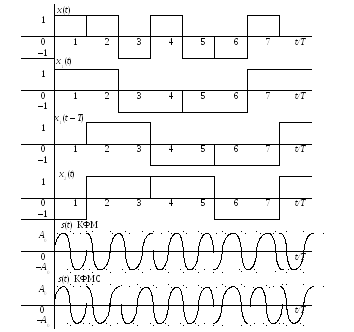
Далее, формируемая последовательность сигналов представляется в виде суммы двух квадратурных составляющих:
![]() , (3.62)
, (3.62)
где
![]() , (3.63а)
, (3.63а)
![]() . (3.63б)
. (3.63б)
|
Таблица 3.2. |
||||
|
|
1 |
1 |
–1 |
–1 |
|
|
1 |
–1 |
1 |
–1 |
|
φ |
π/2 |
0 |
π |
– π/2 |
Указанный недостаток традиционной КФМ можно значительно уменьшить, используя модифицированный вариант КФМ – квадратурную фазовую манипуляцию со сдвигом (КФМС). В нем результирующее колебание по-прежнему формируется квадратурным способом в виде (3.62), однако в синфазной квадратуре несущее колебание sin(ω0t + π/4) модулируется непосредственно подпоследовательностью x1(t):
![]() , (3.64а)
, (3.64а)
![]() . (3.64б)
. (3.64б)
При таком способе
гарантируется, что смена знака любой
из подпоследовательностей x1(t)
и x2(t)
возможна только тогда, когда значение
другой подпоследовательности остается
постоянным. В табл. 3.3 представлены
значения начальной фазы φ и ее скачков
Δφ для различных сочетаний четного
![]() и нечетных символов
и нечетных символов
![]() и
и
![]() (r,
p,
q = 1,
2).
(r,
p,
q = 1,
2).
|
Таблица 3.3. |
||||||||||||||||
|
|
1 |
1 |
1 |
1 |
–1 |
–1 |
–1 |
–1 |
||||||||
|
|
1 |
1 |
1 |
–1 |
–1 |
1 |
–1 |
–1 |
1 |
1 |
1 |
–1 |
–1 |
1 |
–1 |
–1 |
|
φ |
|
|
|
0 |
0 |
|
0 |
0 |
π |
π |
π |
|
|
π |
|
|
|
Δφ |
0 |
|
|
0 |
0 |
|
|
0 |
||||||||
Как следует из анализа значений, представленных в табл. 3.3., скачки начальной фазы колебания возможны лишь на ±π/2, что существенно снижает паразитную амплитудную модуляцию при прохождении сигналов через частотно-избирательные цепи.