

4.4.1 Составление дискретной передаточной функции замкнутой сау рэп по замкнутым звеньям
![]() (4.18)
(4.18)
где
![]() – коэффициент передачи непрерывной
части по скорости;
– коэффициент передачи непрерывной
части по скорости;
![]() ;
;
![]() .
.
![]() .
(4.19)
.
(4.19)
Дискретную передаточную функцию разомкнутой системы получаем путем перемножения дискретной передаточной функции контура скорости и дискретной передаточной функции ЦАП:
![]() .
(4.20)
.
(4.20)
Дискретная передаточная функция замкнутой системы имеет вид:
 (4.21)
(4.21)
4.4.2 Составление дискретной передаточной функции замкнутой сау рэп по желаемой передаточной функции
Желаемая передаточная функция контура скорости в соответствии с идеей технического оптимума имеет вид:
![]() (4.22)
(4.22)
Осуществим Z-преобразование
передаточной функции
![]() :
:
 .
(4.23)
.
(4.23)
![]() (4.24)
(4.24)
![]() (4.25)
(4.25)
Для замкнутой САУ цифрового электропривода дискретная передаточная функция будет иметь вид:
 (4.26)
(4.26)
4.5 Выбор цифровых датчиков скорости
Для высокоточных цифровых систем
стабилизации скорости двигателей
применяются частотные тахогенераторы
– импульсные датчики скорости. Датчик
состоит из ротора с нарезанными на нем
зубцами и сердечника из трансформаторной
стали. Зазор между сердечником и ротором
– не более 1 мм. Обмотка сердечника
питается постоянным током, создающим
магнитный поток через ротор. При вращении
ротора величина зазора периодически
меняется, вследствие чего в обмотке
наводится ЭДС датчика скорости с частотой
![]() ,
где p – число зубцов
ротора.
,
где p – число зубцов
ротора.
Формирование прямолинейных импульсных
сигналов производится двухкаскадным
усилителем на транзисторах. Импульсы
датчика преобразуются далее в сигнал
в цифровом коде при помощи цифрового
преобразователя частоты и поступают в
систему управления. Посредством
интегрирующего усилителя импульсы тока
преобразуются в дальнейшем в аналоговый
сигнал, пропорциональный скорости (для
аналоговых систем). Импульсные датчики
с индукционными частотными тахогенераторами
могут работать при скоростях свыше
![]() .
.
4.6 Выбор средств сопряжения микропроцессора с измерительными преобразователями и исполнительными органами
Сигналы в САУ РЭП являются аналоговыми и имеют различную форму. ЭВМ, напротив, оперирует строго определенными формой и уровнем. В связи с этим встает задача сопряжения САУ РЭП с ЭВМ.
Из ЭВМ код задания передается на
регистр-защелку, который поддерживает
его постоянным на время преобразования
в сигнал управления
![]() .
Преобразование осуществляет ЦАП. Далее
сигнал поступает на регулятор тока и
тиристорный преобразователь, управляющие
скоростью двигателя. Скорость двигателя
определяется датчиком импульсов, который
преобразует скорость вращения ротора
двигателя в последовательность импульсов
– сигнал обратной связи
.
Преобразование осуществляет ЦАП. Далее
сигнал поступает на регулятор тока и
тиристорный преобразователь, управляющие
скоростью двигателя. Скорость двигателя
определяется датчиком импульсов, который
преобразует скорость вращения ротора
двигателя в последовательность импульсов
– сигнал обратной связи
![]() .
Количество импульсов данного сигнала
подсчитывается счетчиком импульсов,
который преобразует его в код
.
Количество импульсов данного сигнала
подсчитывается счетчиком импульсов,
который преобразует его в код
![]() и передает на регистр-защелку и далее
в ЭВМ. Все операции записи-чтения
синхронизируются ЭВМ. Полный цикл
вычисления производится за время
и передает на регистр-защелку и далее
в ЭВМ. Все операции записи-чтения
синхронизируются ЭВМ. Полный цикл
вычисления производится за время
![]() – период дискретности системы.
– период дискретности системы.
Регистры-защелки выбираем из серии К580: К580ИР82 – 8-миразрядные регистры с управлением по уровню и тремя состояниями входных-выходных линий, напряжение питания +5 В, максимальный ток – 32 мА.
Преобразователь ЦАП имеет следующие характеристики: 10 разрядов, время установления – 5 мкс, абсолютная погрешность 3%, опорное напряжение 17 В, ток потребления 2 мА, напряжение питания 517 В.
Для формирования последовательности
импульсов, число которых прямо
пропорционально зависит от скорости
вращения ротора двигателя, используем
датчик импульсов ВЕ178 с частотой импульсов
–
![]() .
Он представляет собой источник и приемник
светового сигнала, разделенные диском
с прорезями. Диск связан с валом ротора
и при его вращении перекрывает и открывает
доступ светового сигнала от источника
к приемнику, формируя импульсы.
.
Он представляет собой источник и приемник
светового сигнала, разделенные диском
с прорезями. Диск связан с валом ротора
и при его вращении перекрывает и открывает
доступ светового сигнала от источника
к приемнику, формируя импульсы.
Количество импульсов подсчитывается
двумя счетчиками импульсов СТ16 555 4Е 19,
работающих совместно (для обеспечения
8-миразрядности). Питание СТ16 производится
от напряжения 15 В.
Подсчитанное количество импульсов за
период дискретности
![]() счетчик преобразует в код
счетчик преобразует в код
![]() и передает на регистр-защелку и далее
в ЭВМ, и обнуляется сигналом с ЭВМ,
поданным на вход R.
и передает на регистр-защелку и далее
в ЭВМ, и обнуляется сигналом с ЭВМ,
поданным на вход R.
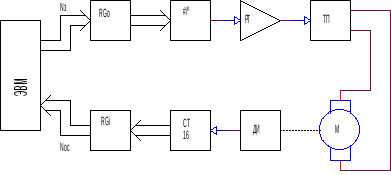
Рисунок 4.5 – Схема цифрового контура скорости