

3.3 Оценка качества регулирования в различных режимах работы
По полученным кривым переходного процесса для каждого режима осуществляется оценка качества регулирования САУ РЭП по т.н. прямым показателям качества: время переходного процесса и статической погрешности в установившемся режиме, причем данная погрешность должна соответствовать погрешности, полученной при построении статической упорной характеристики РЭП в замкнутой САУ. Это условие является одним из критериев правильности решения.
-
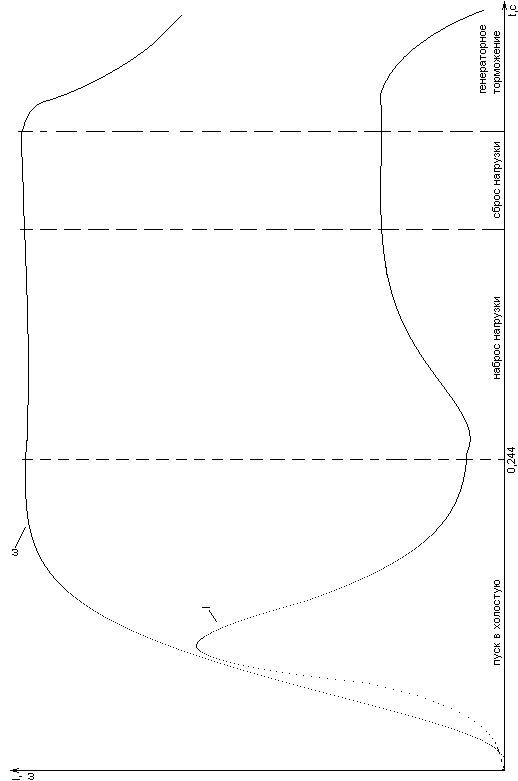
Рисунок 3.4 – Кривые переходных процессов скорости и тока
Пуск РЭП главного движения осуществляется
в холостую. По таблице А.1 в «Приложении
А» определим, что динамический ток
составляет 10,592 А, что не превышает двух
номинальных токов. Время переходного
процесса составляет 0,244 с. Статическая
погрешность в установившемся режиме
определится как
![]() не превышает 5% величины.
не превышает 5% величины.
При набросе нагрузки (таблица А.2) ток
двигателя колеблется около номинального
(5,3 А) с амплитудой 0,1…0,2 А. Статическая
ошибка
![]() не превышает 5% величины. Просадка по
скорости составляет 0,067
не превышает 5% величины. Просадка по
скорости составляет 0,067
![]() ,
что позволяет охарактеризовать данную
САУ РЭП как высокоточную и устойчивую
при работе под нагрузкой.
,
что позволяет охарактеризовать данную
САУ РЭП как высокоточную и устойчивую
при работе под нагрузкой.
При сбросе нагрузки (таблица А.3) величина
тока колеблется около значения 5,59 и
наблюдается небольшой скачок скорости
(0,3), после чего скорость стабилизируется.
Статическая ошибка
![]() не превышает 5% величины.
не превышает 5% величины.
При генераторном торможении наблюдается
стабильное снижение тока и скорости до
5,1 А и 93,325
![]() соответственно (таблица А.4).
соответственно (таблица А.4).
Согласно полученным данным исследования можно сделать вывод о том, что проектируемая система соответствует требованиям по устойчивости и точности САУ РЭП, что говорит о правильности проведенного расчета.
4 Расчет цифрового электропривода – контура скорости в рэп
Управление тиристорным регулируемым электроприводом производится путем изменения угла управления тиристоров через дискретные промежутки времени. Эти свойства регулируемого электропривода создают предпосылки для использования цифровых регуляторов на основе микроЭВМ. При таком подходе процесс проектирования электропривода сводится к выбору оптимальной структуры системы и ее программированию.
4.1 Определение периода дискретного времени управления в цифровом электроприводе
Проектирование средств сопряжения МПС
с объектом связано с определением
конкретных величин, обеспечивающих
требуемые показатели работы цифрового
электропривода по точности и быстродействию,
которые зависят от периода дискретности
![]() времени управления в цифровом
электроприводе.
времени управления в цифровом
электроприводе.
При выборе периода дискретности возможно
использование различных подходов. В
качестве расчетного значения
![]() принимают наименьшее.
принимают наименьшее.
-
Для электропривода с тиристорным преобразователем период дискретности равен:
![]() (4.1)
(4.1)
где
![]() – число фаз преобразователя;
– число фаз преобразователя;
![]() – частота питающей сети. Тогда
– частота питающей сети. Тогда
![]() .
.
-
Для выбранного порядка астатизма период дискретности рассчитывается по формуле:
![]() (4.2)
(4.2)
где
![]() – порядок астатизма;
– порядок астатизма;
![]() – линейное ускорение.
– линейное ускорение.
Принимая усредненные значения
![]() ,
,
![]() ,
получим
,
получим
![]() .
Тогда
.
Тогда
![]() .
.
-
Для избранной точности управления период дискретности рассчитывается по формуле:
 (4.3)
(4.3)
где
![]() – порядок экстраполяции для данного
цифрового электропривода. Тогда
– порядок экстраполяции для данного
цифрового электропривода. Тогда
![]() .
.
Исходя из полученных значений периода
дискретности, выбираем период дискретности
![]() .
.