

2.3 Расчет задатчика интенсивности
Для получения постоянного динамического тока якоря в переходных режимах система управления электропривода должна обеспечить постоянное ускорение двигателя. Это достигается с помощью задатчика интенсивности.
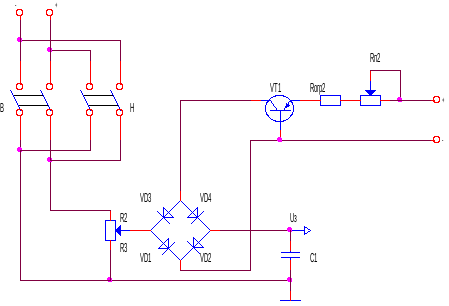
Рисунок 2.4 – Схема электрическая принципиальная задатчика интенсивности
Входное постоянное напряжение, пропорциональное заданной скорости привода, заряжает конденсатор C1, в цепи которого установлен транзистор VT1, регламентирующий зарядный ток, который остается постоянным вплоть до очень малого напряжения на переходе «коллектор-база». Величина этого тока регулируется током смещения через эмиттерный переход. Требуемая полярность напряжения на транзисторе VT1 обеспечивается мостом VD1VD4.
Напряжение на конденсаторе C1 изменяется по закону:
![]() (2.20)
(2.20)
где
![]()
![]() – заданное допустимое угловое ускорение,
– заданное допустимое угловое ускорение,
![]() – постоянная времени заряда,
– постоянная времени заряда,
![]() – сопротивление в цепи заряда.
– сопротивление в цепи заряда.
Из соотношения
 получим
получим
![]() .
Из справочника выбираем конденсатор
типа КБГТ-33МС емкостью 33 мкФ.
.
Из справочника выбираем конденсатор
типа КБГТ-33МС емкостью 33 мкФ.
Если к зажимам конденсатора подключить
вход СУ, охваченной отрицательной
обратной связью, то напряжение на
конденсаторе и напряжение (скорость)
на двигателе будет изменяться по
линейному закону:
![]() .
.
2.4 Построение упорной электромеханической характеристики рэп в замкнутой системе
Значение угловой скорости определяется из уравнения статической характеристики для замкнутой САУ:
![]() (12.21)
(12.21)
Упорная характеристика строится по
пяти характерным точкам, каждая из
которых определяется двумя координатами:
значением угловой скорости
![]() и заданным значением силы тока I.
и заданным значением силы тока I.
Точка 1 – точка идеального холостого
хода:
![]() .
.
Скорость идеального холостого хода:
![]() (12.22)
(12.22)
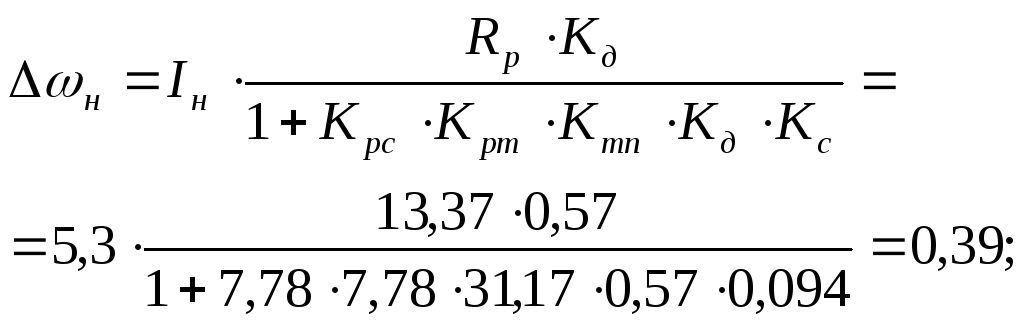
Точка 2 – точка номинального режима:
![]() .
.
 (12.23)
(12.23)
![]() (12.24)
(12.24)
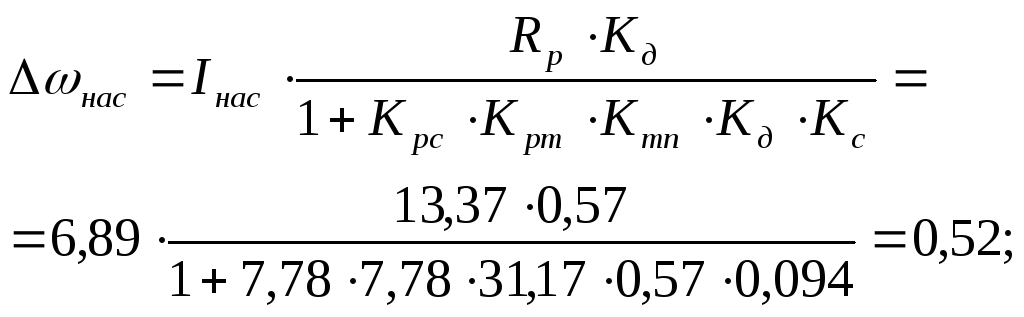
Точка 3 – точка, в которой регулятор
скорости переходит в режим насыщения
(обратная связь по скорости прекращает
свое действие):
![]() .
.
![]() (12.25)
(12.25)
 (12.26)
(12.26)
![]() (12.27)
(12.27)
Точка 4 – точка, в которой вступает
в действие отсечка по току:
![]() .
.
![]() (12.28)
(12.28)
![]() (12.29)
(12.29)
![]() (12.30)
(12.30)
Точка 5 – точка, в которой наступает
стопорный режим:
![]() .
.
![]() (12.31)
(12.31)
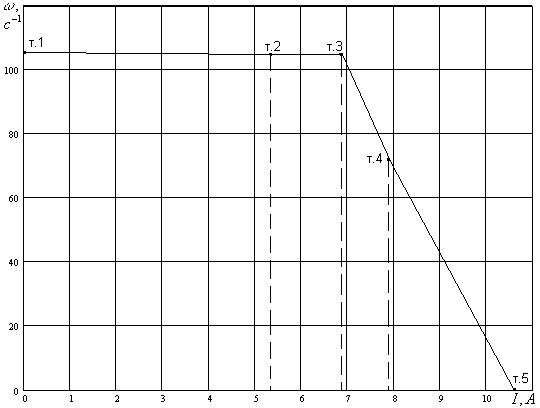
Рисунок 2.5 – Упорная электромеханическая характеристика в замкнутой САУ ЭП
2.5 Расчет и выбор регуляторов скорости и тока и их нелинейных звеньев
|
|
|
|
Рисунок 2.6 – Схема НЗ2 и регулятора скорости |
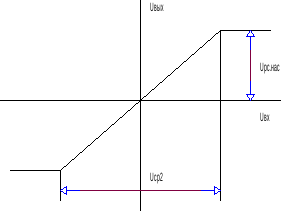
Рисунок 2.7 – Статическая характеристика регулятора скорости и НЗ2 |
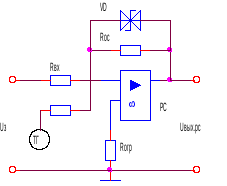
Выбор регулятора скорости и зоны насыщения НЗ2 осуществляется в соответствии с рисунком 2.6.
Входное напряжение на НЗ2 (определяется разностью между напряжением задания и сигналом обратной связи по скорости):
![]() (12.32)
(12.32)
Напряжение на выходе регулятора скорости
при
![]() :
:
![]() (12.33)
(12.33)
|
|
|
|
Рисунок 2.8 – Схема НЗ1 и регулятора тока |
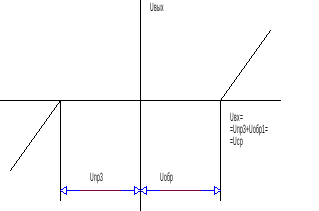
Рисунок 2.9 – Сигнал на входе регулятора тока – напряжение сравнения внутреннего контура |
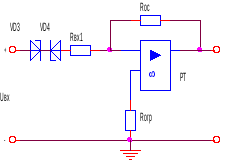
Реализация регулятора тока
![]() и зоны нечувствительности в контуре
тока НЗ1 осуществляется в соответствии
с рисунком 2.8.
и зоны нечувствительности в контуре
тока НЗ1 осуществляется в соответствии
с рисунком 2.8.
Значение коэффициента обратной связи
по току
![]() выбирается из соотношения:
выбирается из соотношения:
![]() (12.34)
(12.34)
Напряжение сравнения:
![]() (12.35)
(12.35)
Для осуществления отсечки по току
принимаем стабилитроны на напряжение
срабатывания
![]() ,
для формирования зоны насыщения принимаем
стабисторы, так как
,
для формирования зоны насыщения принимаем
стабисторы, так как
![]() .
.
По справочнику выбираем стабилитрон
типа Д815В (![]() )
и стабистор типа 2С107А (
)
и стабистор типа 2С107А (![]() ).
).