

3 Динамика сау рэп
3.1 Составление структурной схемы в соответствии с заданным порядком астатизма и функциональным назначением электропривода
Структура САУ РЭП реализует идею подчиненного регулирования с последовательной коррекцией. Данная система является астатической системой первого порядка (системой однократного интегрирования).
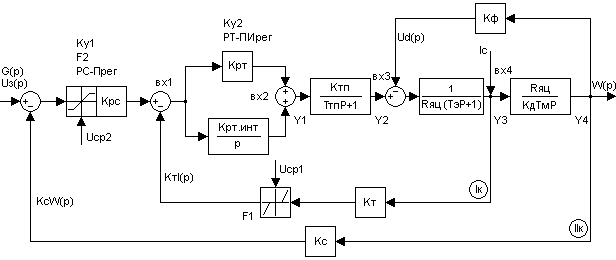
Рисунок 3.1 – Структурная схема РЭП
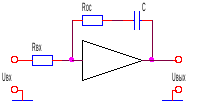
Регулятор во внутреннем токовом контуре
РЭП представляется ПИ-регулятором с
передаточной функцией
![]() ,
полученной в результате суммирования
усилительного
,
полученной в результате суммирования
усилительного
![]() и интегрирующего звена
и интегрирующего звена
![]() ,
где
,
где
![]() – коэффициент регулятора тока
интегрирующий:
– коэффициент регулятора тока
интегрирующий:
![]() (3.1)
(3.1)
где
![]() – некомпенсируемая постоянная времени.
– некомпенсируемая постоянная времени.
![]() (3.2)
(3.2)
![]() (3.3)
(3.3)
где
![]() ;
;
![]() .
Тогда
.
Тогда
![]() .
.
Учитывая, что
![]() ,
получим:
,
получим:
![]() (3.4)
(3.4)
|
|
|
Рисунок 3.2 – Структура регулятора тока |
Величины сопротивлений
![]() и
и
![]() рассчитаны в п.2.3:
рассчитаны в п.2.3:
![]() ,
,
![]() .
Учитывая, что
.
Учитывая, что
![]() и
и
![]() ,
принимаем емкость конденсатора C
60 мкФ.
,
принимаем емкость конденсатора C
60 мкФ.
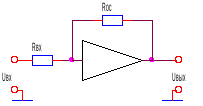
Регулятор во внешнем контуре скорости
РЭП является П-регулятором с коэффициентом
усиления
![]() .
Регулятор реализован на операционном
усилителе, охваченном обратной связью.
.
Регулятор реализован на операционном
усилителе, охваченном обратной связью.
|
|
|
Рисунок 3.3 – Структура регулятора скорости |
Задатчик интенсивности, коэффициенты обратной связи, нелинейные элементы схемы 3.3 рассчитаны ранее.
Тиристорный преобразователь является апериодическим звеном САУ со следующей передаточной функцией:
![]() (3.5)
(3.5)
где
![]() .
.
Электрическая часть двигателя (статор) имеет передаточную функцию:
![]() (3.6)
(3.6)
где
![]() .
.
Статический ток, соответствующий приложенной нагрузке:
![]() .
(3.7)
.
(3.7)
Механическая часть двигателя (ротор) имеет передаточную функцию:
![]() (3.8)
(3.8)
3.2 Расчет переходных процессов в рэп
Переходный процесс по определенному параметру представляет собой графическое решение дифференциального уравнения, описывающего движение исследуемой системы по соответствующей координате. Поэтому переходные процессы по току и скорости в РЭП рассчитываются на основе решения соответствующих дифференциальных уравнений.
3.2.1 Составление дифференциальных уравнений в форме Коши и уравнений связи
Система дифференциальных уравнений
составляется на основе структурной
схемы, показанной на рисунке 3.1. На схеме
выходные и выходные параметры звеньев,
в знаменателе передаточных функций
которых содержится оператор p,
обозначаются через
![]() и y с соответствующими
индексами. Нелинейные звенья НЗ1 и НЗ2
представлены в виде функций F1
и F2 соответственно.
Дифференциальные уравнения, описывающие
каждое из указанных звеньев, получают
путем преобразования их передаточных
функций. Уравнения, записанные в форме
Коши, имеют следующий вид:
и y с соответствующими
индексами. Нелинейные звенья НЗ1 и НЗ2
представлены в виде функций F1
и F2 соответственно.
Дифференциальные уравнения, описывающие
каждое из указанных звеньев, получают
путем преобразования их передаточных
функций. Уравнения, записанные в форме
Коши, имеют следующий вид:
-
интегральная часть регулятора тока:
![]()
-
тиристорный преобразователь:

-
электрическая часть двигателя (статор):
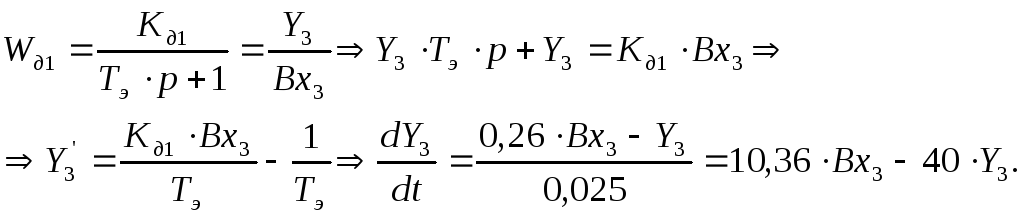
-
механическая часть двигателя (ротор):
![]()
Входные параметры
![]() описываются следующими алгебраическими
уравнениями:
описываются следующими алгебраическими
уравнениями:

3.2.2 Составление таблицы исходных расчетных данных для реализации стандартных программ построения переходных процессов в рэп
Расчет переходных процессов по току и скорости осуществляется на основе стандартной программы «РЭП-СЭП». Решение системы уравнений, приведенных в п.3.2.1, производится методом Рунге-Кутта с автоматическим выбором шага.
Таблица 3.1 – Исходные данные для программы «РЭП-СЭП»
|
№ |
Параметр |
Идентификатор |
Значение и единица измерения |
Наименование параметра |
|
1 |
|
|
0,244 c |
Время переходного процесса |
|
2 |
|
|
7,78 |
Коэффициент передачи регулятора скорости |
|
3 |
|
|
7,78 |
Коэффициент передачи регулятора тока |
|
4 |
|
|
0,84 |
Коэффициент передачи интегральной части |
|
5 |
|
|
31,17 |
Коэффициент передачи тиристорного преобразователя |
|
6 |
|
|
0,01 c |
Постоянная времени тиристорного преобразователя |
|
7 |
|
|
|
Коэффициент передачи Д1 |
|
8 |
|
|
0,025 c |
Электромагнитная постоянная времени |
|
9 |
|
|
|
Коэффициент передачи Д2 |
|
10 |
|
|
|
Коэффициент обратной связи по току |
|
11 |
|
|
|
Коэффициент обратной связи по скорости |
|
12 |
|
|
10 В |
Напряжение задания |
|
13 |
|
|
0,53…10,6 А |
Статический ток нагрузки |
|
14 |
|
|
0,061 с |
Механическая постоянная времени |
|
15 |
|
|
3,42 В |
Напряжение сравнения в НЗ1 |
|
16 |
|
|
0,15 В |
Напряжение сравнения в НЗ2 |
|
17 |
|
|
В |
Выходное напряжение с ПИ-регулятора |
|
18 |
|
|
В |
ЭДС тиристорного преобразователя |
|
19 |
|
|
А |
Сила тока |
|
20 |
|
|
|
Скорость электродвигателя |
Параметры
![]() принимаются по результатам расчета
предыдущего этапа, поэтому в случае
пуска в холостую эти параметры принимаются
равными нулю. Расчет производится для
четырех этапов: пуск в холостую, наброс
нагрузки, снятие нагрузки, генераторное
торможение. При набросе нагрузки
статический ток принимают равным
номинальному току двигателя. Задающее
напряжение при генераторном напряжении
снижается до 57 В.
принимаются по результатам расчета
предыдущего этапа, поэтому в случае
пуска в холостую эти параметры принимаются
равными нулю. Расчет производится для
четырех этапов: пуск в холостую, наброс
нагрузки, снятие нагрузки, генераторное
торможение. При набросе нагрузки
статический ток принимают равным
номинальному току двигателя. Задающее
напряжение при генераторном напряжении
снижается до 57 В.