

Приложение б
Таблица Б.1 – Переходный процесс в ЦЭП
|
Время |
Значение |
|
0,00100 |
0,05000 |
|
0,00600 |
0,24427 |
|
0,00700 |
0,27815 |
|
0,00800 |
0,31052 |
|
0,00900 |
0,34143 |
|
0,01000 |
0,37096 |
|
0,01100 |
0,39917 |
|
0,01200 |
0,42611 |
|
0,01300 |
0,45184 |
|
0,01400 |
0,47642 |
|
0,01500 |
0,49989 |
|
0,01600 |
0,52232 |
|
0,01700 |
0,54373 |
|
0,01800 |
0,56419 |
|
0,01900 |
0,58373 |
|
0,02000 |
0,60240 |
|
0,02100 |
0,62022 |
|
0,02900 |
0,73689 |
|
0,03000 |
0,74868 |
|
0,03100 |
0,75995 |
|
0,03200 |
0,77071 |
|
0,03300 |
0,78100 |
|
0,03400 |
0,79082 |
|
0,03700 |
0,81771 |
|
0,03800 |
0,82588 |
|
0,03900 |
0,83369 |
|
0,04000 |
0,84115 |
|
0,04100 |
0,84827 |
|
0,05000 |
0,89960 |
|
0,05100 |
0,90410 |
|
0,05200 |
0,90840 |
|
0,05300 |
0,91251 |
|
0,05400 |
0,91643 |
|
0,05500 |
0,92018 |
|
0,05600 |
0,92376 |
|
0,05700 |
0,92717 |
|
0,05800 |
0,93044 |
|
0,05900 |
0,93356 |
|
0,06000 |
0,93654 |
|
0,06100 |
0,93938 |
|
0,06200 |
0,94210 |
|
0,06300 |
0,94470 |
|
0,06400 |
0,94718 |
|
0,06500 |
0,94955 |
|
0,06600 |
0,95181 |
|
0,06700 |
0,95397 |
|
0,06800 |
0,95604 |
Приложение в
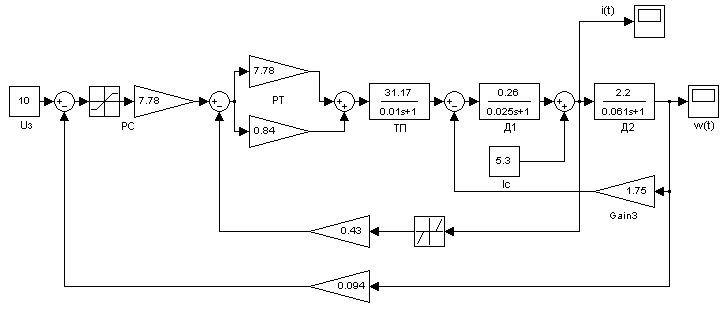
Рисунок В.1 – Модель двухконтурной САУ РЭП
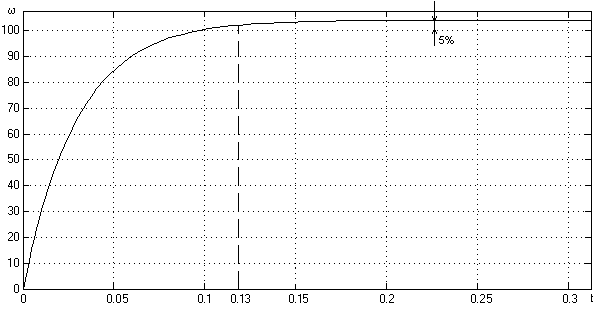
Рисунок В.2 – Переходный процесс в системе по скорости
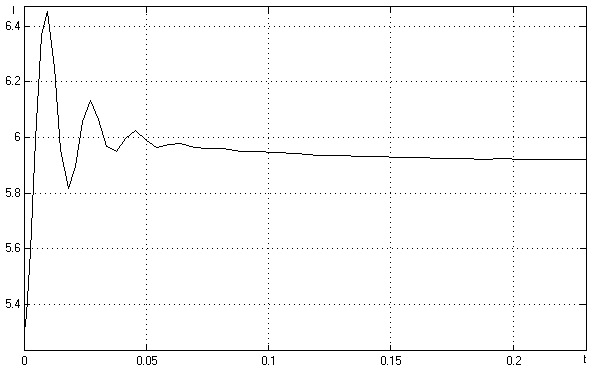
Рисунок В.3 – Переходный процесс в системе по току