

3.2. Кінематичні характеристики руху точки
3.2.1. Швидкість
точки. Нехай рух матеріальної
точки відносно вибраної системи відліку
задано векторним рівнянням
![]() .
Розглянемо момент часу
.
Розглянемо момент часу
![]() ,
якому відповідає вектор
,
якому відповідає вектор
![]() і точка
і точка
![]() на траєкторії. Надамо часу
на траєкторії. Надамо часу
![]() приросту
приросту
![]() .
Часу
.
Часу
![]() відповідає вектор
відповідає вектор
![]() і точка
і точка
![]() на траєкторії. Точки
на траєкторії. Точки
![]() і
і
![]() визначають вектор
визначають вектор
![]() ,
який називається приростом вектора
,
який називається приростом вектора
![]() за час
за час
![]() .
Зауважимо, що вектор
.
Зауважимо, що вектор
![]() залежить від
залежить від
![]() (рис. 3.4).
(рис. 3.4).
Величина
 називається вектором середньої швидкості
матеріальної точки за час
називається вектором середньої швидкості
матеріальної точки за час
![]() .
.
Границя
цього вектора при
![]() називається вектором миттєвої
швидкості точки в момент часу
називається вектором миттєвої
швидкості точки в момент часу
![]()
(3.5)
В довільний момент часу формулу (3.5) можна записати у вигляді
(3.6)
Н а
підставі (3.6) можна зробити такий висновок:
вектор швидкості руху матеріальної
точки в довільний момент часу, дорівнює
похідній від радіус-вектора точки в цей
же момент часу і характеризує зміну
положення точки відносно вибраної
системи відліку з часом.
а
підставі (3.6) можна зробити такий висновок:
вектор швидкості руху матеріальної
точки в довільний момент часу, дорівнює
похідній від радіус-вектора точки в цей
же момент часу і характеризує зміну
положення точки відносно вибраної
системи відліку з часом.
В
Рис.
3.4. Переміщення
Матеріальної точки
![]() напрямлений вздовж січної
напрямлений вздовж січної
![]() .
При зменшенні
.
При зменшенні
![]() січна буде обертатися навколо точки
січна буде обертатися навколо точки
![]() і в граничному положенні стане дотичною
до траєкторії в точці
і в граничному положенні стане дотичною
до траєкторії в точці
![]() .
Таким чином, вектор швидкості точки
напрямлений вздовж дотичної до траєкторії
в напрямку руху.
.
Таким чином, вектор швидкості точки
напрямлений вздовж дотичної до траєкторії
в напрямку руху.
Вектори
![]() і
і
![]() завжди прикладені до матеріальної
точки.
завжди прикладені до матеріальної
точки.
Припустимо, що рух матеріальної точки задано координатним способом
![]() ;
; ![]() ;
; ![]()
Позначимо
через
![]() проекції вектора її
швидкості
проекції вектора її
швидкості
![]() на координатні осі. Тоді на підставі
(3.6) маємо
на координатні осі. Тоді на підставі
(3.6) маємо
![]()
П
(3.7)
![]() ;
;
![]() ;
;
![]()
Величину
вектора швидкості
![]() і кути
і кути
![]() які він утворює з координатними осями
які він утворює з координатними осями
![]() відповідно визначаємо за формулами
векторної алгебри
відповідно визначаємо за формулами
векторної алгебри
(3.8)![]()
![]() ;
;
 ;
;
![]()
При натуральному способі задання руху точки рівняння руху має вигляд
![]()
На підставі формули (3.6) можна записати
 .
.
Тут
враховано, що
 .
Таким чином,
.
Таким чином,
(3.9)![]()
Формули (3.6)-(3.9) дозволяють визначити вектор швидкості в будь-який момент часу при довільному способі задання руху точки.
3 .2.2.
Прискорення точки.
Швидкість руху матеріальної точки в
кожен момент часу характеризує зміну
положення точки відносно вибраної
системи відліку. Разом з тим швидкість
руху точки є функцією часу. Тому для
повного кінематичного аналізу руху
точки необхідно ввести ще одну кінематичну
характеристику яка називається
прискоренням.
.2.2.
Прискорення точки.
Швидкість руху матеріальної точки в
кожен момент часу характеризує зміну
положення точки відносно вибраної
системи відліку. Разом з тим швидкість
руху точки є функцією часу. Тому для
повного кінематичного аналізу руху
точки необхідно ввести ще одну кінематичну
характеристику яка називається
прискоренням.
Нехай рух матеріальної точки задано векторним способом
![]() ;
;
 .
.
Р
Рис.
4.5. До визначення прискорення
матеріальної точки![]() ,
для якого визначимо вектор
,
для якого визначимо вектор
![]() .
Часу
.
Часу
![]() надамо приросту
надамо приросту
![]() і визначимо вектор
і визначимо вектор
![]() .
Вектор
.
Вектор
![]() називається
приростом вектора
називається
приростом вектора
![]() за час
за час
![]() (рис. 3.5).
(рис. 3.5).
Величину
 будемо називати вектором середнього
прискорення за проміжок часу
будемо називати вектором середнього
прискорення за проміжок часу
![]() .
.
Границя
![]() при
при
![]() визначає миттєве прискорення матеріальної
точки в момент часу
визначає миттєве прискорення матеріальної
точки в момент часу
![]()

З врахуванням (3.6) цю формулу можна записати так
(3.10)
Вектор прискорення руху матеріальної точки дорівнює похідній по часу від вектора швидкості і характеризує зміну швидкості з часом. Він завжди прикладений до матеріальної точки.
Припустимо, що рух точки задано координатним способом
![]() ;
; ![]() ;
; ![]()
Позначивши
через
![]() проекції на координатній осі прискорення
проекції на координатній осі прискорення
![]() ,
на підставі (3.10) одержимо
,
на підставі (3.10) одержимо
![]() .
.
Порівняємо відповідні координати в лівій і правій частинах
(3.11)![]()
 ;
;
![]()
Аналогічно
до (3.8), величина і напрямок вектора
![]() визначаються за формулами:
визначаються за формулами:
(3.12)![]()
![]() ;
;
 ;
;
![]() ,
,
де
![]() – кути, які утворює вектор
– кути, які утворює вектор
![]() з
координатними осями
з
координатними осями
![]() відповідно.
відповідно.
Якщо рух матеріальної точки задано натуральним способом, то
![]() ;
;
![]() .
.
Позначимо
через
![]() одиничний вектор дотичної до траєкторії
в розглядуваній точці так, щоб виконувалася
умова
одиничний вектор дотичної до траєкторії
в розглядуваній точці так, щоб виконувалася
умова
![]() .
.
Диференціюючи
останню рівність по
![]() одержимо
одержимо
(3.13)

Використаємо формулу Френе із курсу диференціальної геометрії
 ,
,
д
Рис.
5.6. До визначення
прискорення матеріальної точки![]() – радіус кривини траєкторії в розглядуваній
точці;
– радіус кривини траєкторії в розглядуваній
точці;
![]() – вектор головної нормалі траєкторії,
який перпендикулярний до
– вектор головної нормалі траєкторії,
який перпендикулярний до
![]() і напрямлений до центра кривини траєкторії
(рис. 3.6). В результаті простих перетворень
із (3.13) одержимо
і напрямлений до центра кривини траєкторії
(рис. 3.6). В результаті простих перетворень
із (3.13) одержимо
(3.14)
О Рис.
6.7. До визначення
прискорення матеріальної точки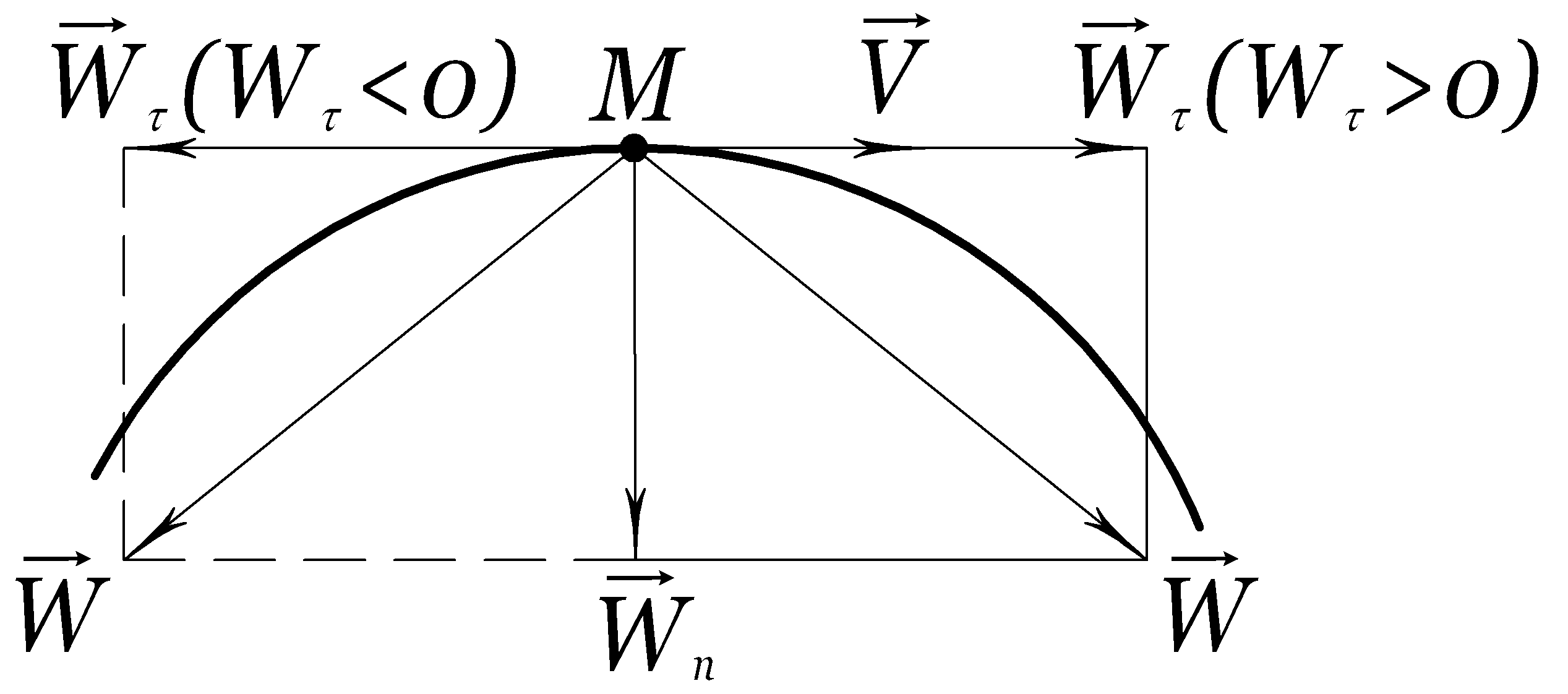
![]() ,
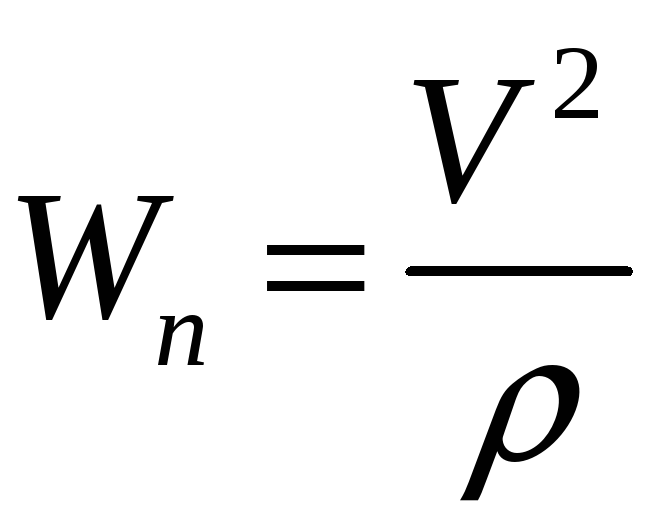
а інша, яка напрямлена по головній
нормалі, називається нормальним
прискоренням
,
а інша, яка напрямлена по головній
нормалі, називається нормальним
прискоренням
![]() (рис. 3.7)
(рис. 3.7)
![]() ;
;  .
.
Величини цих складових і повного прискорення обчислюються за формулами
(3.15)![]()
 ;
;
![]() .
.
Зауважимо,
що при
![]()
![]() , а при
, а при
![]()
![]() .
.