

8.2 Метод перемещений
Идея метода перемещений состоит в том, что за неизвестные принимаются не силы, а угловые и линейные перемещения характерных точек системы: z1, z2, z3,…,zn.
Вместо понятия "статическая неопределимость" вводится понятие "кинематическая неопределимость". За степень кинематической неопределимости принимается сумма неизвестных угловых и линейных перемещений:
|
|
(12) |
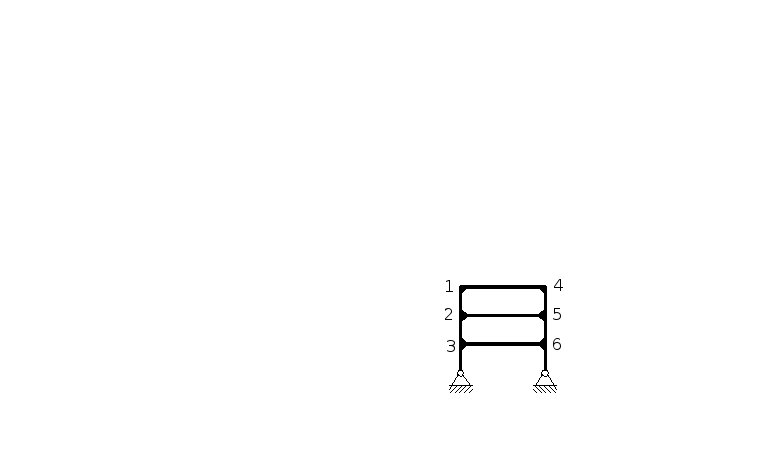
В плоских стержневых
системах число неизвестных угловых
перемещений равно числу незакрепленных
в плоскости жестких узлов. Например,
для рис. 24 а,
![]() ,
для рисунка 24 б,
,
для рисунка 24 б,
![]() .
.
|
а) б) Рисунок 24 – Определение числа угловых перемещений |
|
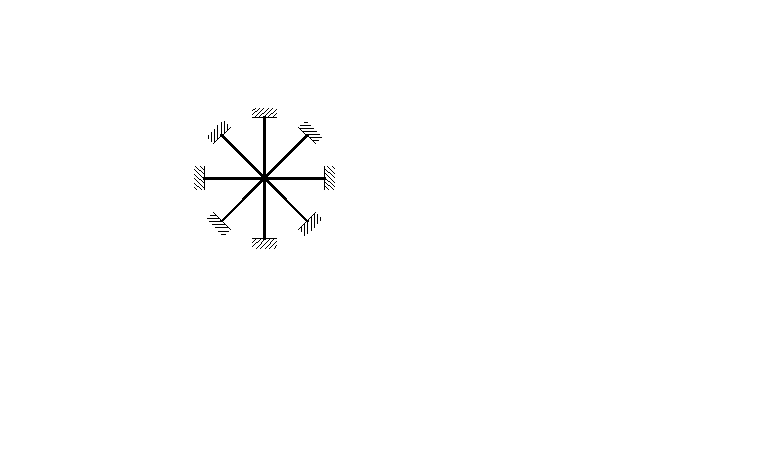
Число неизвестных линейных перемещений определяется следующим образом:
1 Мысленно в каждый жесткий узел врезается шарнир, после чего система становится геометрически изменяемой, то есть превращается в механизм;
2 На эту шарнирную систему накладывают минимальное количество связей, чтобы сделать ее геометрически неизменяемой;
3 Число наложенных в пункте 2 связей и будет количеством неизвестных линейных перемещений.
а) б)
Рисунок 25 – Определение числа линейных перемещений
Степень кинематической
неопределимости системы на рис. 24 а,
![]() ,
системы на рисунке 24 б,
,
системы на рисунке 24 б,
![]() .
.
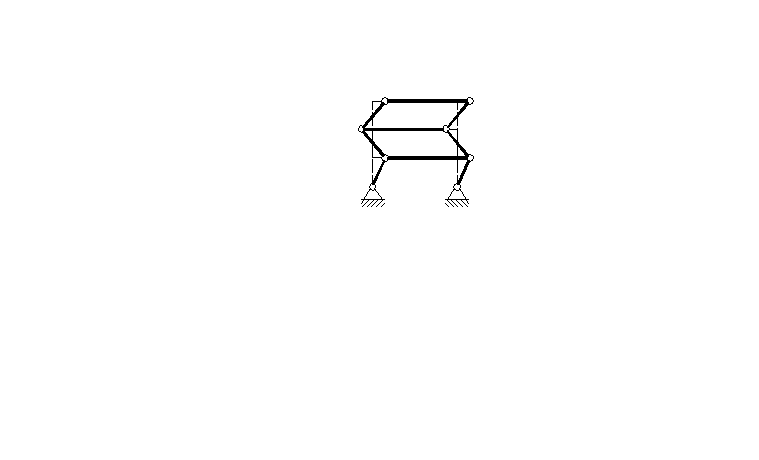
Основная система в методе перемещений получается не отбрасыванием лишних связей, а наоборот введением дополнительных искусственных связей ликвидирующих неизвестное перемещение.
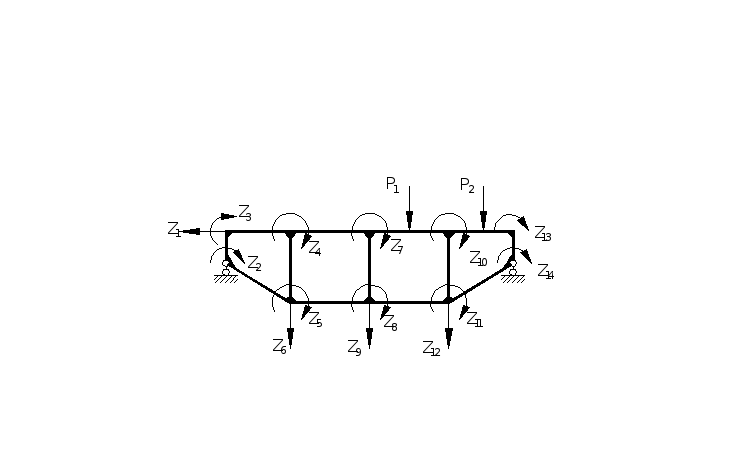
Рисунок 26 – Схема расстановки неизвестных перемещений
Степень кинематической
неопределимости системы на рис. 26,
![]()
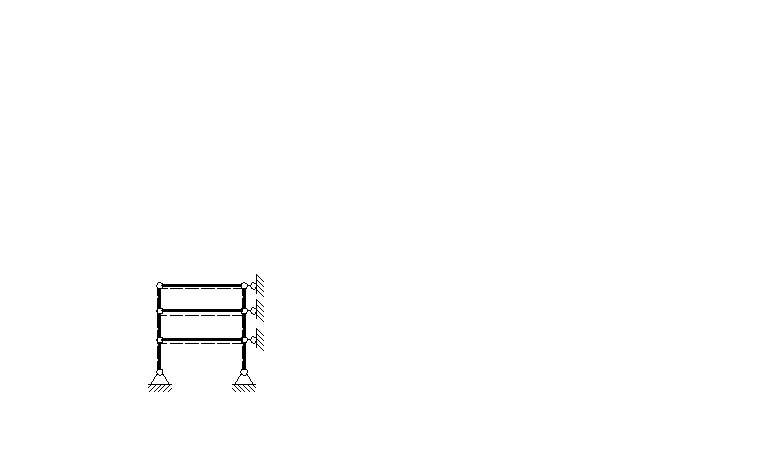
Для получения основной системы метода перемещений необходимо "ликвидировать" все неизвестные перемещения путем установки искусственных заделок во все незакрепленные узлы и установки шарнирных стерженьков для ликвидации линейных перемещений.
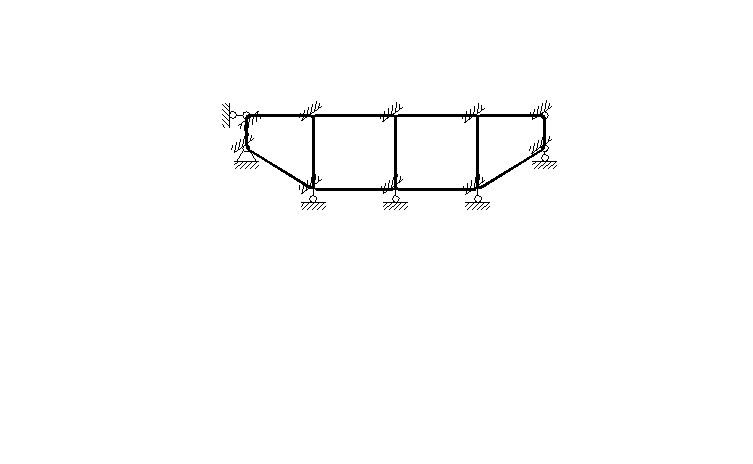
Рисунок 27 – Основная система метода перемещений
Применяемые здесь заделки отличаются от общепринятых в сопромате, а именно: они запрещают поворот узла, но не запрещают его линейных перемещений вдоль x и y.
Эквивалентная система метода перемещений получается путем сообщения (придания) искусственно наложенным связям соответствующих перемещений неизвестных.
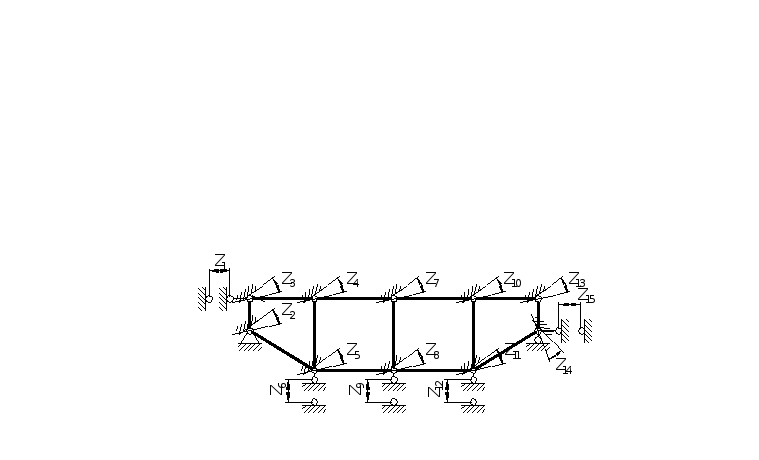
Рисунок 28 – Эквивалентная система метода перемещений
Накладывается также условие, что стержни могут только изгибаться и не могут деформироваться в осевом направлении.
После придания искусственно наложенным связям неизвестных перемещений в них возникнут реакции.
8.2.1 Канонические уравнения метода перемещений
Их составляют из условия, что суммарные реакции в искусственно наложенных связях после их смещения на величину неизвестных перемещений и приложения внешних нагрузок должны быть равны нулю, так как в действительности этих связей нет.
Суммарные реакции
|
|
(13) |
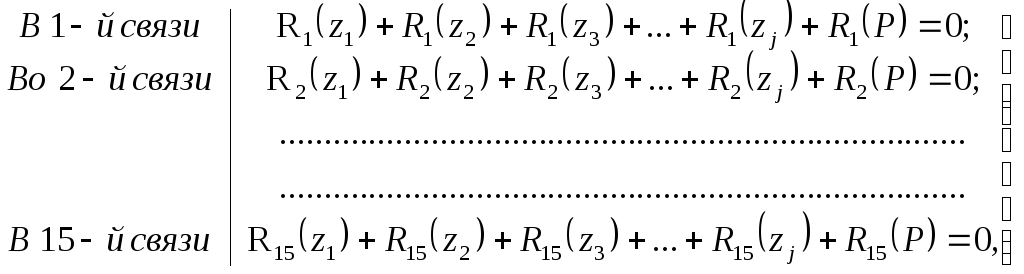
где Ri(zj) - реакция в искусственно наложенной связи с индексом i от неизвестного перемещения с индексом j;
Ri(P) - реакция в искусственно наложенной связи с индексом i от внешних нагрузок.
Слагаемые в этих уравнениях, кроме последних, можно выразить как произведения реакций вызванных единичным перемещением на фактическую длину перемещения:
|
|
(14) |
где rij - реакция в искусственно наложенной связи с индексом i от неизвестного перемещения с индексом j равного 1.
Подставив выражение (2) в уравнение (1) получим окончательный вид канонических уравнений метода перемещений:
|
|
(15) |
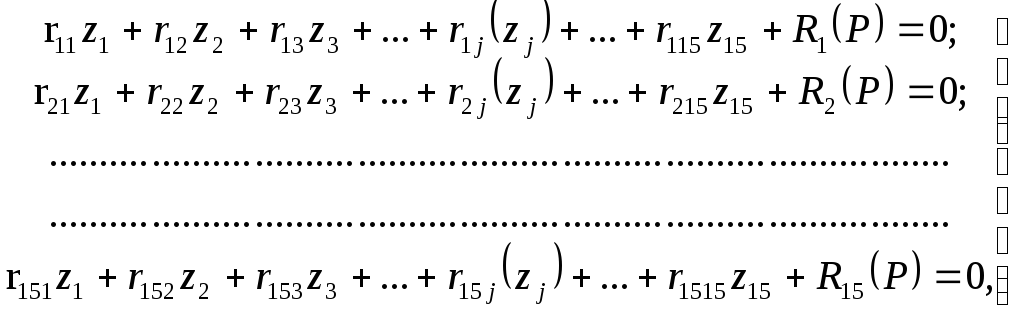
где rij – коэффициенты канонических уравнений по методу перемещений, их физический смысл состоит в том, что они представляют собой реакции в искусственно наложенных связях от соответствующих единичных перемещений.
Слагаемые Ri(P) получили название свободные члены канонических уравнений метода перемещений, их физический смысл состоит в том, что они представляют собой реакции в искусственно наложенных связях от внешней нагрузки.
Для вычисления коэффициентов канонических уравнений и свободных членов используются готовые решения для балок с защемленными концами, которые приводятся в справочниках.
В общем случае расчет статически неопределимых систем по методу перемещений проводится в следующей последовательности:
1 Составляется заданная система, это исходная расчетная схема, она ничем не отличается от той что была в методе сил;
2 Путем наложения искусственных связей, ликвидирующих все неизвестные перемещения, получают основную систему метода перемещений;
3 Путем придания искусственно наложенным связям соответствующих перемещений и приложения внешней нагрузки получают эквивалентную систему метода перемещений;
4 Составляются канонические уравнения метода перемещений;
5 Вычисляются коэффициенты и свободные члены канонических уравнений, при этом используются готовые решения для балок с защемленными концами из справочника;
6 Решают систему канонических уравнений, в результате чего вычисляют неизвестные перемещения;
7 Вычисленное перемещение пересчитывают в неизвестные силовые факторы (моменты, поперечные и продольные силы), при этом также обязательно используются готовые решения для балок с защемленными концами.