

Физика. Краткая теория и примеры решения задач. Методическое пособие 2016
..pdfМИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Вологодский государственный технический университет» (ВоГУ)
КАФЕДРА ФИЗИКИ
ФИЗИКА
Краткая теория и примеры решения задач
Методическое пособие для студентов всех технических специальностей и направлений
бакалавриата заочного отделения
Вологда
2016
УДК
Физика: Методическое пособие для студентов всех технических специальностей заочного отделения. – Вологда: ВоГУ, 2016 - с.
Утверждено редакционно-издательским советом ВоГУ.
Составители:
Корнейчук С.К., канд. физ.-мат. наук, доцент Кузина Л.А., канд. физ.-мат. наук, доцент Калиничева О.В., канд. физ.-мат. наук, доцент Мелконян Ш.Р., ст. преподаватель Штрекерт О.Ю., канд. физ.-мат. наук, доцент
2
Содержание
Введение |
4 |
Программа учебного курса |
4 |
Раздел 1. Физические основы механики Кинематика Динамика материальной точки
Динамика вращательного движения Механические колебания Волны Раздел 1. Задачи
Раздел 2. Гидродинамика. Упругие свойства твёрдых тел. Молекулярная физика. Основы термодинамики
Гидродинамика Упругие свойства твёрдых тел Молекулярная физика Основы термодинамики Раздел 2. Задачи
Раздел 3. Электростатика и постоянный ток Электростатика Законы постоянного тока Раздел 3. Задачи
Раздел 4. Электромагнетизм Магнитное поле
Переходные процессы в электрических цепях. Электромагнитные колебания и волны
Раздел 4. Задачи Раздел 5. Волновая оптика. Квантовая физика
Волновые свойства света Квантовые свойства света Строение атома Волновые свойства частиц Раздел 5. Задачи
Раздел 6. Статистическая физика. Физика твёрдого тела. Строение ядра Молекулярно-кинетическая теория (МКТ)
Понятие о классической статистике Явления переноса
Твёрдое тело: упругие свойства, тепловое расширение, классическая теория теплоемкости твёрдых тел
Квантовые статистики. Энергия Ферми Температурная зависимость сопротивления металлов и полупроводников.
p-n – переход. Термоэлектричество
3
Строение ядра Раздел 6. Задачи Приложения Таблицы вариантов
Библиографический список
4
ВВЕДЕНИЕ
Курс общей физики студенты заочного отделения изучают на первом и втором курсах. Занятия по расписанию проводятся в форме лекций, практических и лабораторных занятий.
Контроль знаний осуществляется при защите контрольных работ, в виде отчётов за проделанные лабораторные работы, а также в виде зачётов и экзаменов. Содержание курса изложено в рабочей программе. Рабочая программа курса составлена на основе требований Государственного стандарта для рассматриваемых специальностей. В программе даны: тематика лекций, темы практических занятий, список лабораторных работ.
5
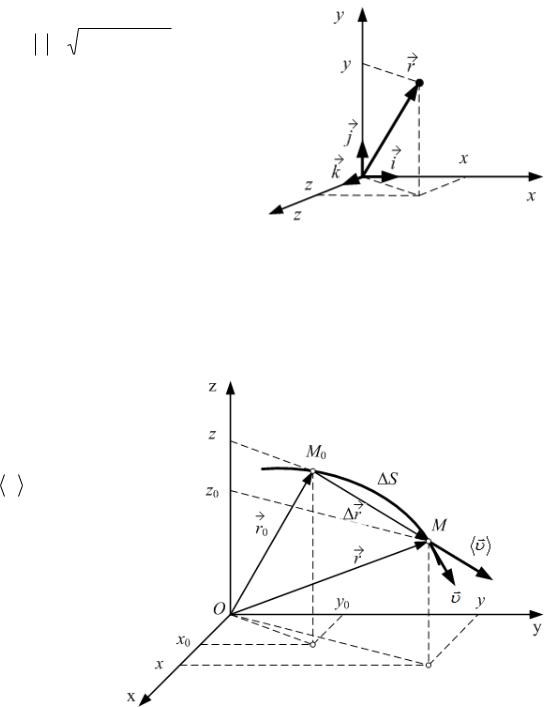
Раздел 1. ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ Кинематика
|
материальной точки задаёт её положение в |
|||
Радиус-вектор r |
||||
пространстве (рис. 1.1): |
|
|
|
|
|
||||
|
r |
x i |
y j |
z k , |
|
|
|
|
|
где x, y и z – координаты точки; |
i , j, k – единичные векторы (орты), |
|||
направленные вдоль осей OX, OY и OZ |
|
|||
соответственно. Модуль вектора |
|
|
|
|
r : |
|
|
||
|
x2 y2 z2 . |
r |
Кинематическое уравнение
движения:
|
|
|
|
|
|
|
|
|
|
r r (t) ; |
|
|
|
или в координатной форме: |
|
|
||||
|
|
|
x x(t) |
|
|
|
|
|
|
|
y(t) |
|
|
|
|
|
y |
|
|
|
|
|
|
|
z(t) |
|
|
|
|
|
z |
|
Рис. 1.1 |
|
|
|
|
|
|
|
|
где t – время. |
|
|
|
|
|
|
|
Перемещение |
|
|
|||
r материальной точки – вектор, соединяющий |
||||||
начальное (M0) и конечное (M) её положение (рис.1.2). Перемещение равно |
||||||
|
|
|
|
|
|
|
|
|
|
|
r |
r |
r0 , |
где r0 |
и r – радиус-векторы начального и конечного положений точки |
|||||
соответственно. |
|
|
|
|
||
Путь S – длина |
|
|
||||
траектории (рис.1.2). |
|
|
|
|||
|
|
|
Средняя |
|
|
|
скорость: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
||
|
t , |
|
|
|
||
– перемещение |
|
|
||||
где r |
|
|
||||
материальной |
точки |
за |
|
|
||
интервал времени t . |
|
|
|
|||
Средняя путевая |
|
|
||||
скорость |
|
(средняя |
|
|
||
скорость |
|
вдоль |
|
|
||
траектории): |
|
|
|
|
|
|
|
ср. |
|
S |
|
|
|
|
t |
|
|
Рис. 1.2 |
||
|
|
|
|
|
||
где S |
– путь (длина |
|
|
|||
траектории), пройденный точкой за интервал времени t .
6

Мгновенная скорость:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
lim |
t |
|
|
; |
|
|
|
|
|
|
|
|
|
|
dt |
|
|||||
|
|
|
|
|
|
|
|
|
|
t 0 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
x |
i y j z k , |
|
||||||
где x |
dx |
|
y |
dy |
|
|
|
dz |
|
|
|
|
|
|
|
|
, |
|
, |
z |
|
|
– проекции скорости |
на оси координат. |
|||||||
dt |
dt |
|
dt |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Модуль скорости:

 x2 y2 z2 .
x2 y2 z2 .
Закон сложения скоростей:
|
|
|
|
|
, |
|
|
0 |
|
||
|
– относительная скорости. |
||||
где |
– абсолютная, 0 |
– переносная, |
|||
Ускорение:
Среднее ускорение – изменение скорости за единицу времени:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
2 |
|
1 , |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср. |
|
|
t |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
– изменение скорости, произошедшее за промежуток времени t . |
|||||||||||||||||||||||||||||||||
где |
|
|||||||||||||||||||||||||||||||||
Мгновенное ускорение – быстрота изменения скорости во времени; |
||||||||||||||||||||||||||||||||||
производная скорости по времени: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
lim |
|
|
d |
|
|
|
r |
; |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
t |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
dt2 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t 0 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ay |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
ax i |
j az |
k , |
|
|
|
||||||||||||||||
где a |
|
|
d |
x |
|
d 2 x |
, |
a |
|
|
d y |
|
d 2 y |
, a |
|
|
|
|
d |
z |
|
|
d |
2 z |
– проекции ускорения |
|||||||||
|
x |
|
|
dt |
dt 2 |
|
|
y |
|
dt |
|
|
|
dt 2 |
|
|
|
z |
|
|
|
|
dt |
|
|
|
|
dt 2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
a на оси координат. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Модуль ускорения: a |
|
|
ax2 a2y az2 . |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и a 0. |
|
||||||||
При равномерном движении const |
|
|
||||||||||||||||||||||||||||||||
Кинематическое уравнение равномерного движения материальной |
||||||||||||||||||||||||||||||||||
точки: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
r0 |
t , |
|
|
|
|
|
|
|
|
||||||
или вдоль оси OX:
x x0 x t ,
где r0 и x0 – радиус-вектор и координата начального положения точки
соответственно; и x – скорость тела и её проекция на ось OX; t – время.
|
|
|
При равнопеременном движении a const . |
||
Скорость точки при равнопеременном движении: |
||
|
|
|
|
0 |
a t , |
или в проекции на ось OX:
7
|
|
|
x 0x |
axt . |
|
|
и ax |
|
|
и 0 x – начальная |
|
где |
a |
– ускорение и его проекция |
на ось OX, 0 |
скорость и её проекция на ось OX.
Кинематическое уравнение равнопеременного движения:
|
|
|
|
|
|
|
|
|
|
|
|
|
at 2 |
|
|
|
|
||||
r |
r0 |
0t |
|
|
, |
|
|
|||
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
||
или вдоль оси OX: |
|
|
|
|
|
|
|
|
|
|
x x |
0x |
t |
axt2 |
. |
|
|
||||
|
|
|
||||||||
|
0 |
|
|
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
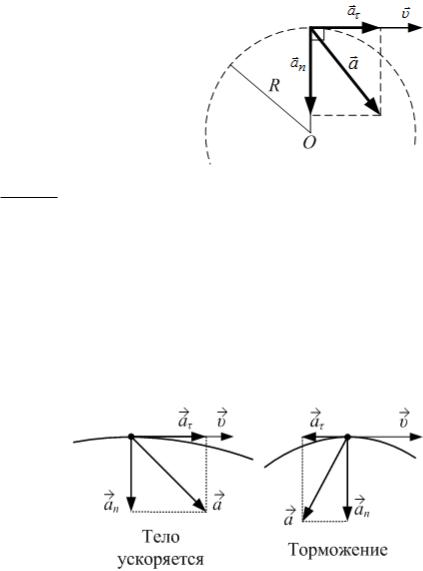
Ускорение при криволинейном движении |
||||||||||
можно представить как сумму нормальной |
|
и |
||||||||
an |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
тангенциальной a составляющих (рис.1.3): |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a an a ; |
|
|
|
Рис. 1.3 |
|||||
a 
 an2 a2 .
an2 a2 .
Нормальное ускорение
an 2 R
и направлено к центру кривизны траектории перпендикулярно ей. Здесь R – радиус кривизны траектории в данной точке. Нормальное ускорение показывает быстроту изменения скорости по направлению.
Тангенциальное (касательное) ускорение
|
a |
|
d |
|
|
|
|
|
|
|
|||
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
и направлено по касательной к |
|
|
||||
траектории. |
Оно |
показывает |
|
|
||
быстроту изменения скорости по |
|
|
||||
величине. |
|
|
|
Касательное |
|
|
ускорение направлено так же, |
|
|
||||
как и скорость, если она |
|
|
||||
возрастает |
по |
модулю (тело |
|
|
||
ускоряется, рис. 1.4); в случае |
Рис. 1.4 |
Рис. 1.5 |
||||
|
|
|||||
торможения |
тела |
касательное |
|
|
||
ускорение направлено противоположно скорости (рис. 1.5). |
|
|||||
Положение |
твердого тела (при заданной |
оси вращения) |
||||
определяется углом поворота (или угловым перемещением , рис. 1.6).Кинематическое уравнение вращательного движения:
8

f (t) .
Средняя угловая скорость:
ср. ,t
где – угол поворота за интервал времени t .
Мгновенная угловая скорость:
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|||
|
lim |
t |
|
|
|
. |
||
|
dt |
|||||||
t 0 |
|
|
|
|||||
Угловое ускорение: |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|||
lim |
|
|
|
|
|
; или |
||
|
|
|
dt |
|||||
t 0 t |
|
|
|
|
||||
|
2 |
|
|
|
|
|||
|
d |
|
|
|
|
|
Рис. 1.6 |
|
dt 2 . |
|
|
|
|||||
|
|
|
|
|||||
Угловая скорость и угловое ускорение являются аксиальными векторами, их направления совпадают с осью вращения (рис. 1.6).
Связь между угловыми и линейными величинами
– угол поворота φ и путь S, пройденный точкой по дуге окружности
радиусом R:
S R ;
– угловая скорость и линейная скорость : |
|
||
R , |
|
|
|
[ R]; |
|||
– угловое ускорение |
и тангенциальное (касательное) ускорение a : |
|||
|
a R , |
|
|
|
|
a |
[ R] ; |
||
– нормальное ускорение an , угловая скорость и линейная скорость : |
||||||
a 2R , |
|
|
|
|
|
|
a |
|
[ [ R]]. |
||||
n |
n |
|
|
|
|
|
При равномерном вращении const , 0.
Кинематическое уравнение равномерного вращения:
0 t ,
где 0 – начальная угловая координата; t – время.
Частота вращения:
Nt T1 ,
где N – число оборотов, совершаемых телом за время t ( 2 N ); Т – период вращения (время одного полного оборота).
Связь угловой скорости с периодом и частотой:
2 2 .
T
При равнопеременном вращательном движении const .
9
Угловая скорость при равнопеременном вращении:
0 t ,
где 0 – начальная угловая координата; 0 – начальная угловая скорость, t – время, ε – угловое ускорение.
Кинематическое уравнение равнопеременного вращения ( const ):
0 0 t t2 . 2
Динамика материальной точки
Второй закон Ньютона (уравнение движения материальной точки):
|
|
|
N |
|
|
|
|
|
|
||
|
|
|
Fi |
|
|
|
N |
|
|||
|
|
i 1 |
|
|
|
|
|
|
|||
|
a |
|
|
|
, |
|
или ma |
F |
, |
||
|
|
|
|
|
|
||||||
|
|
|
m |
|
|
|
i |
|
|||
|
|
|
|
|
|
i 1 |
|
||||
N |
|
|
|
|
|
|
|
|
|
|
|
где Fi |
– равнодействующая всех N сил, приложенных к телу (векторная |
||||||||||
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
2 |
|
|
|
|||
|
|
|
|
r |
|
|
|
||||
сумма всех сил), m – его масса, |
a |
|
|
|
|
|
– его ускорение. |
||||
|
|
|
|
|
|||||||
dt 2
Второй закон Ньютона в импульсной форме:
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
dp |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
F |
, |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
dt |
i |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где p m – импульс тела (материальной точки), |
– его скорость. |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если сила F , действующая на тело, постоянна, то |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p F t |
|
|
|
|
|
|
|
|
|
|||||
где t – промежуток времени, в течение которого действовала сила |
|
||||||||||||||||||||||
F |
; p – |
||||||||||||||||||||||
изменение импульса тела. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Второй закон Ньютона в проекциях: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
N |
|
|
|
|
|
|
N |
|
|
|
|
|
|
N |
|
|
|
|
|
|
max Fix ; |
may Fiy ; |
|
|
maz Fiz , |
|
|
|
||||||||||||||
|
|
|
|
|
i 1 |
|
|
|
|
|
|
i 1 |
|
|
|
|
|
i 1 |
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
2 |
x |
N |
|
d |
2 |
y |
|
|
N |
|
|
|
d |
2 |
z |
N |
|
|
|
|
|
m |
|
F ; |
m |
|
F |
; |
|
m |
|
F |
|
, |
|
|||||||||
|
|
dt2 |
ix |
|
dt2 |
iy |
|
|
|
dt 2 |
|
iz |
|
|
|||||||||
|
|
i 1 |
|
i 1 |
|
|
|
i 1 |
|
|
|
|
|||||||||||
где под знаком суммы стоят проекции сил на |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
соответствующие оси координат. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Третий закон Ньютона (рис. 1.7): |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F12 |
F21 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Закон всемирного тяготения (сила
гравитационного притяжения): |
Рис. 1.7 |
|
10