

3.1.2 Динамическое торможение
Для
осуществления этого режима якорь
двигателя отключают от сети и замыкают
на тормозное сопротивление
 так как это представлено на рис. 3.2.
так как это представлено на рис. 3.2.
Уравнение механической характеристики запишется как
 ,
(3.2)
,
(3.2)
где
 тормозной момент,
тормозной момент, сопротивление якорной цепи.
сопротивление якорной цепи. Ток якоря можно определить как
Ток якоря можно определить как
 ,
(3.3)
,
(3.3)

Рис. 3.2. Схема включения ДПТ при динамическом торможении
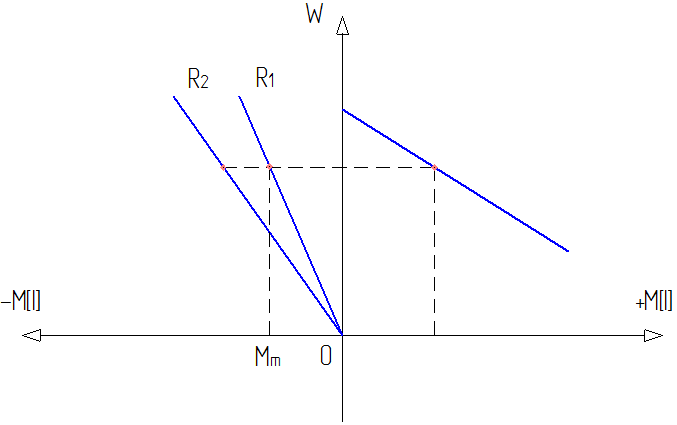
Рис.
3.3. Механические (электромеханические)
характеристики режима динамического
торможения при

Способ динамического торможения достаточно экономичный, так как двигатель работает генератором на постоянную нагрузку, потребляя из сети энергию только на возбуждение.
При переводе ДПТ из двигательного режима (первый квадрант, рис 3.3) в режим динамического торможения (второй квадрант). Необходимо ограничивать величину максимального тормозного тока в момент переключения:
3.1.3 Торможение противовключением
Этот режим по существу соответствует работе ДПТ генератором последовательно с сетью и имеет место тогда, когда обмотки двигателя включены для вращения в одну сторону, но под действием внешнего момента или сил инерции якорь ДПТ вращается в противоположную сторону. В результате знак ЭДС якоря изменяется на противоположный и ток якоря определяется как
 ,
(3.4)
,
(3.4)
Так
как ток якоря может превысить допустимое
значение, то для его ограничения в цепь
якоря вводится добавочное сопротивление
 .
Рассмотренный режим ранее широко
использовался в грузоподъемных машинах
для опускания грузов. В настоящее время
его использовать нецелесообразно из-за
больших потерь электроэнергии.
.
Рассмотренный режим ранее широко
использовался в грузоподъемных машинах
для опускания грузов. В настоящее время
его использовать нецелесообразно из-за
больших потерь электроэнергии.
3.1.4 Противовключение производимое изменением полярности подводимого напряжения
Если у ДПТ работающего в двигательном режиме изменить полярность напряжения на обмотке якоря на противоположную, то знак тока якоря I измениться на противоположный в соответствии с выражением
 (3.5)
(3.5)

Рис.3.3.
Характеристики в режиме торможения
противовключением при изменении
полярности напряжения при

Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте.
При этом происходит интенсивное торможение и скорость вращения двигателя падает до нуля. Если в этот момент времени обмотку якоря не отключить от сети, то направление вращения измениться на противоположное, т.е. произойдет реверс двигателя. Это безусловно накладывает определенные ограничения на применимость данного способа торможения. С энергетической точки зрения данный способ неэкономичен, т.к. большое количество энергии выделяется на добавочном сопротивлении, которое необходимо включать в якорную цепь для ограничения бросков тормозного тока. Механические характеристики для этого режима торможения представлены на рис.3.3
3.4 Описание лабораторного стенда
Стенд состоит из электромеханического агрегата и приборного блока, соединенных между собой двумя силовыми кабелями и одним измерительным. Приборный блок подключается к трехфазной сети 380В. Включение стенда к сети осуществляется автоматом на левой боковой панели приборного блоки, а измерение частоты вращения цифровым тахометром.
Как следует из электрической принципиальной схемы, изображенной на передней панели стенда последовательно с якорными обмотками исследуемого двигателя М1 и нагрузочного М2 включены добавочное сопротивления R1 и R2. Величина добавочных сопротивлений R1 и R2 может ступенчато изменяться соответствующими переключателями на панели, от нулевой до десятой ступени. Соответственно R1 и R2 могут принимать по десять значений от 0 до 5 Ом с шагом 0,5Ома , т.е., например для R1 можно записать
 Ом,
Ом,
где N – номер включенной ступни (0…10), определяемый по самой верхней цифре на ручке переключателя.
Перевод обозначений на панели:
POWER энергия; SUPPLY VOLTAGE напряжение питания; TACHOMETER тахометр; SPEED, rad/s скорость, рад/с; CURRENT SOURСE источник тока; ARMATURE CURRENT ток якоря; EXCITING CURRENT ток возбуждения; STEP VOLTAGE шаговый переключатель напряжения; HAND CONTROL ручное управление; CMPT компьютер; PHOTOELECTRIC TRANSDUSER фотоэлектрический преобразователь; POWER SUPPLY источник энергии; TEST MOTOR исследуемый двигатель; BRAKE MOTOR тормозной двигатель; ON включено; OFF выключено.