

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfТак, при наблюдении загоризонтных целей доплеровская фильтрация не ис пользуется, а измерение скорости проводится по изменению задержки сигнала.
В режиме средней частоты повторения наблюдается неоднозначность одновременно и по дальности, и по скорости цели.
Структурная схема БРЛС, характерная для комплексов АВАКС (РЛДН), представлена на рис. 2.1. Поскольку сведения об элементах структуры БРЛС и их технических характеристиках взяты из открытых опубликованных источни ков (книг, статей, рекламных проспектов), реальные данные комплексов могут отличаться от рассматриваемых далее.
Рис. 2.1
Когерентность радиолокационного тракта обеспечивается единым для всех сигналов высокостабильным задающим генератором 1. Обычно исполь зуют кварцевый генератор 60... 100 МГц с термостабилизацией и изоляцией от механических колебаний. Возможно применение нескольких генераторов раз личной частоты колебаний, охваченных обратной связью по фазе (фазовая ав топодстройка). Излучаемые сигналы, сигналы гетеродинов, промежуточных частот, частот модуляции, а также импульсы синхронизации работы всех бло ков, формируются путем умножения-деления частот задающих генераторов в блоках синтезатора сигналов 2 и синхронизатора 3.
Зондирующий сигнал формируется путем усиления и модуляции сигнала синтезатора. После предварительного усиления сигнала малой мощности (блок 4), он подается через цифровой регулятор мощности (аттенюатор 5) на возбуди тель (усилитель средней мощности 6). Уровень сигнала возбудителя и, соответ ственно, мощность излучаемого зондирующего сигнала, регулируются в зави симости от угла места (дальности) зоны обзора.
Импульсный модулятор 7 и выходной усилитель мощности 8 обеспечива ют требуемую импульсную мощность излучаемого сигнала. В качестве выход ного усилителя мощности используют клистроны импульсной мощностью до 1 мВт при средней мощности до 15 кВт.
Блок 9 формирует высоковольтное напряжение питания (до 90 кВ) с ма лым уровнем пульсаций для исключения паразитной фазовой модуляции зон дирующего сигнала.
Сформированный высокочастотный импульс через вращающийся переход коаксиального типа поступает на группу работающих на передачу и прием фа зовращателей 10, обеспечивающих фазовое управление положением диаграм мы направленности антенны по углу места (сканирование и стабилизацию при маневре носителя).
Обычно используется антенна волноводно-щелевого типа. Волноводы длиной 7...8 м (в S-диапазоне) обеспечивают узкую (~1°) диаграмму направ ленности по азимуту. В вертикальной плоскости антенны размещаются 28 та ких волноводов, образуя апертуру антенны по углу места размером 1,5 м и формируя диаграмму направленности шириной 5°. Каждый волновод питает ся от своего фазовращателя. Главное требование к диаграмме направленности антенны - низкие максимальный и интегральный уровни боковых лепестков, так как они определяют мощность сигнала фона, на котором ведется обнару жение сигналов низколетящей цели. Так, средний уровень боковых лепестков может быть -40 дБ, а минимальный - до 55 дБ. Для обеспечения такого низ кого уровня используют специальное амплитудное распределение по аперту ре антенны.
Прием отраженных сигналов ведется той же антенной, что и передача. Система фазовращателей 10 обеспечивает одинаковое положение луча на пере дачу и прием. При быстром сканировании по углу места и большой дальности обзора отраженные сигналы запаздывают и приходят тогда, когда приемная диаграмма направленности оказывается смещенной относительно направления облучения и, соответственно, прихода отраженной волны. Для компенсации этого смещения положение приемной диаграммы направленности управляется дополнительной системой фазовращателей 11. Сигналы управления формиру ются в блоке 12.
Отраженные от целей и фона электромагнитные волны принимаются ан тенной и высокочастотные сигналы через систему фазовращателей 10, 11
поступают на вход приемника 14. Мощное излучение передатчика и импульс ных источников помех бланкируется системой защиты 13, имеющей до пяти ступеней для подавления помех различного уровня мощности.
Главной особенностью высокочастотного приемника является использо вание на входе малошумящего усилителя с коэффициентом шума 3...5 дБ, что обеспечивает прием всех типов сигналов целей: низколетящих и загоризонтных воздушных целей, надводных целей, а также помеховых сигналов в диапа зоне работы БРЛС.
Сигналы с выхода СВЧ-приемника через вращающийся переход разделя ются и поступают на три различных супергетеродинных приемника с двойным преобразованием частоты.
Импульсно-доплеровский приемник 15 формирует на выходе усилителя промежуточной частоты sin- и cos-составляющие сигнала (фазовый детектор).
Стробы, определяющие длительность импульса (0,5...1,5 мкс), разделяют сигналы по каналам задержки (дальности). В каждом канале проводится преоб разование аналоговых sin- и cos-сигналов в цифровую форму (АЦП), которые поступают для дальнейшей обработки в сигнальный процессор 16. Система слежения за сигналом фона 17, принимаемого по основному лепестку диаграм мы направленности антенны, обеспечивает необходимыми данными для обра ботки сигналов процессор.
Сигнальный процессор детектирует по частоте помеховые сигналы фона, принимаемого по главному лучу диаграммы направленности антенны. Полоса фильтра определяется шириной спектра сигнала фона в основном луче и со ставляет обычно несколько килогерц. Уровень сигнала фона по отношению к уровню внутреннего шума приемника (динамический диапазон фона) зависит от многих факторов (типа подстилающей поверхности, вида зондирующего сигнала, формы диаграммы направленности антенны) и обычно составляет ве личину 70...80 дБ. Для подавления такого уровня фона иногда применяют сис тему из двух ступеней: сначала в аналоговом виде при помощи кварцевых фильтров, а затем в цифровом виде процессором.
Наряду с сигналом фона происходит подавление и сигналов целей, летя щих с небольшой радиальной скоростью. Граница частот фильтра режекции определяет минимальную радиальную скорость обнаруживаемых воздушных целей на фоне отражений от земной поверхности.
Вне зоны режекции фильтра уровень мощности спектра фона определяет ся уровнем боковых лепестков частотной характеристики фильтра и диаграм мы направленности антенны, а вне полосы спектра фона - уровнем внутренне го шума приемника. Выбирая параметры сигнала (частоты повторения), харак теристики фильтра и формируя сверхнизкий уровень боковых лепестков диаграммы направленности антенны, стараются обеспечить прием сигналов цели во всем частотном диапазоне сигналов целей (скоростей целей).

Дальнейшая обработка сигнальным процессором сводится к доплеровской фильтрации и формированию матрицы сигналов «задержка - доплеровская частота», формированию порога с постоянным уровнем ложных тревог и обна ружению сигналов по превышению порога сигналами в каналах матрицы. Дан ные обнаруженных сигналов «задержка-частота» передаются через интерфейс в процессор данных 18, который определяет координаты и состояние целей для передачи в центральный процессор комплекса.
Приемник сигналов загоризонтных целей 19 выполняет в аналоговом ви- ,де сжатие импульсов обычно при помощи ультразвуковой линии задержки, детектирует и сравнивает выходной сигнал с порогом, определяемым уров нем внутреннего шума приемника и внешними помехами. Порог регулирует ся для обеспечения постоянства вероятности ложной тревоги. После преобра зования в цифровую форму информация об обнаруженных целях передается в процессор данных.
Приемник надводных целей 20 осуществляет сжатие импульсов при по мощи линии задержки для получения высокого разрешения по дальности, что позволяет обнаруживать малоразмерные надводные цели при большой степени волнения моря. Обнаружение сигнала проводится после детектора огибающей по превышению порога, регулируемого в зависимости от уровня отражений от морской поверхности для обеспечения постоянства ложных тревог. АЦП и микропроцессор 21 обеспечивают режекцию сигналов суши с использованием цифровой карты 22. Сигналы обнаруженных целей поступают через интерфейс в процессор данных.
Структурная схема содержит также глубокую встроенную систему диаг ностики и поддержания работоспособности за счет дублирования основных блоков (на рисунке не показана).
2.2. Энергетический потенциал бортовой радиолокационной системы
Эффективность решения всех задач радиолокационного наблюдения: об наружения целей, определения их координат, распознавания, идентификации функционального состояния и сопровождения, в значительной мере зависит от энергии принимаемого сигнала и спектральной плотности шумов.
Энергия сигнала Ес зависит от средней мощности принимаемого сигнала Рс с учетом всех потерь в тракте РЛС ап и от времени когерентного накопления сигнала в системе обработки Тс
где Рср - средняя мощность излучения передатчика; G - коэффициент усиле
ния передающей антенны; |
- плотность потока мощности излу |
чения у цели на расстоянии Дц ; |
- плотность потока мощности от |
раженного сигнала у антенны;  - мощность переизлучения цели с
- мощность переизлучения цели с
эффективной поверхностью рассеивания (ЭПР) - мощность прини маемого сигнала антенной, имеющей апертуру площадью Sa.
Суммарные потери мощности сигнала ап формируются составляющими потерь во всех элементах тракта РЛС (рис. 2.2).
Рис. 2.2
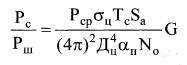
Время когерентного накопления сигнала определяется временем обзора Тобз заданного углового сектора Ω:
где Θ0Φ0 - угловой размер диаграммы направленности антенны по азимуту Θ0 и углу места Ф0 ( Θ0Φ0Ω - в стерадианах).
С учетом того, что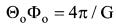 энергия сигнала
энергия сигнала
Отношение сигнал/шум при согласованной обработке сигнала равно от ношению сигнал/шум на выходе линейной части системы обработки при рав номерной спектральной плотности шумов в пределах спектра сигнала N0 = const. При учете только внутреннего шума приемника N0 = kTFm , где
κΤ = 4·10 Вт/Гц, Fm - фактор шума приемника. В этом случае отношение сигнал/шум
Из представленного выражения следует, что энергетическая характери стика сигнала цели (Рс/Рш) в режиме обзора на первый взгляд не зависит от длины волны БРЛС. В то же время каждый из параметров РЛС, среды распро странения и цели существенным образом определяется длиной волны.
В режиме слежения цели при заданном времени обработки сигнала тс от ношение сигнал/шум
также лишь косвенно зависит от длины волны.
Однако коэффициент усиления антенны  зависит от λ, его макси
зависит от λ, его макси
мальное значение определяется возможностью обеспечения требуемой точности амплитудно-фазового распределения поля по раскрыву антенны. С увеличением отношения размера антенны к длине волны άα/λ требования к точности выдержи вания распределения поля по апертуре возрастают, особенно для бортовой РЛС, где значительно влияют вибрации и изгибные колебания фюзеляжа самолета, из менения температуры и давления, отражения от элементов конструкции самолета
идр. Максимальные значения коэффициентов усиления реальных бортовых ан тенн РЛС в широком диапазоне частот изменяются в пределах 30.. .40 дБ и опре деляются в основном возможностью размещения антенны на борту самолета.
Врассмотренном случае помехи типа «белого шума» отношение Рс/Рш не зависит от вида модуляции зондирующего сигнала и определяется только средней мощностью сигнала. При помехах другого типа (отражения от земной
иводной поверхностей, имитирующие активные помехи, пассивные преднаме
ренные помехи) Рс/Рш зависит и от вида сигнала и от типа помехи, что требует оптимизации модулирующей функции зондирующего сигнала и обработки принимаемого сигнала.
При решении задач измерения параметров цели и получения высокого разрешения также необходимо оптимизировать вид сигнала.
Далее рассматриваются характеристики элементов радиолокационного тракта, определяющие энергетический потенциал БРЛС.
2.3. Радиолокационные характеристики целей
23.1. Радиолокационные характеристики воздушных целей
Вкачестве основных (типовых) воздушных целей обычно рассматриваются: стратегические бомбардировщики В-52Н, В-IB, B-2A;
многоцелевые истребители F-22A, EF-2000;
истребители-бомбардировщики F-35A, «MHpa>K-2000N,D»; палубные истребители-штурмовики F-18A, «Рафаль М»; патрульный самолет Орион Р-ЗВ;
крылатые ракеты воздушного базирования ALCM-D AGM-86-D, FCM AGM-129F;
крылатые ракеты морского базирования «Томахок» BGM-109; оперативно-тактические ракеты АТАКМАС; беспилотные летательные аппараты (Б Л А).
Вмногочисленных опубликованных открытых материалах (справочниках, монографиях, рекламных статьях) приводятся различные характеристики воз душных целей, часто значительно различающиеся.
Ниже используются оценочные значения характеристик с учетом исследо ваний автора.
Втабл. 2.1 приведены ТТХ самолетов, определяющие их ЭПР, динамиче ские и статистические свойства отраженных сигналов.
Самолеты обычной конструкции и БЛА имеют ЭПР от 100 до 0,1 м в X- диапазоне (табл. 2.2).
Таблица 2.1
Тип |
|
Размах |
Максимальная |
Пото |
Минималь |
Макси |
|
|
скорость: |
мальная |
|||||
Длина, м |
крыла, |
лок, |
|||||
самолета |
на высоте |
ная высота, м |
перегрузка, |
||||
|
м |
км |
|||||
|
|
у земли |
|
ед. |
|||
|
|
|
|
|
|||
В-52Н |
48 |
56,4 |
1050 |
15 |
150-300 |
2,5 |
|
|
|
|
675 |
|
|
|
|
В-1В |
44,8 |
41,67 |
1500 |
16 |
60-150 |
2,5 |
|
|
|
|
ИЗО |
|
|
|
|
В-2А |
21,03 |
52,43 |
1000 |
15,2 |
60-150 |
2,7-3,7 |
|
|
|
|
765 |
|
|
|
|
F-22A |
19,55 |
13,1 |
2350 |
19 |
50 |
9 |
|
|
|
|
1400 |
|
|
|
|
EF-2000 |
15,96 |
10,85 |
2200 |
18 |
50 |
9 |
|
|
|
|
1300 |
|
|
|
|
Рафаль Μ |
15,3 |
10,9 |
1900 |
18 |
50 |
9 |
|
|
|
|
1390 |
|
|
|
|
F-35A |
15,47 |
10,7 |
2000 |
16 |
50 |
9 |
|
|
|
|
1300 |
|
|
|
|
Мираж 2000 |
14,36 |
9,13 |
2350 |
18 |
50 |
8 |
|
|
|
|
1400 |
|
|
|
|
F-18A |
17,1 |
11,4 |
1900 |
15,2 |
50 |
8 |
|
|
|
|
1300 |
|
|
|
|
Р-ЗВ |
35,61 |
30,37 |
780 |
20 |
50 |
2,5 |
|
БЛА MQ-9 |
10,97 |
20,12 |
405 |
13,7 |
- |
- |
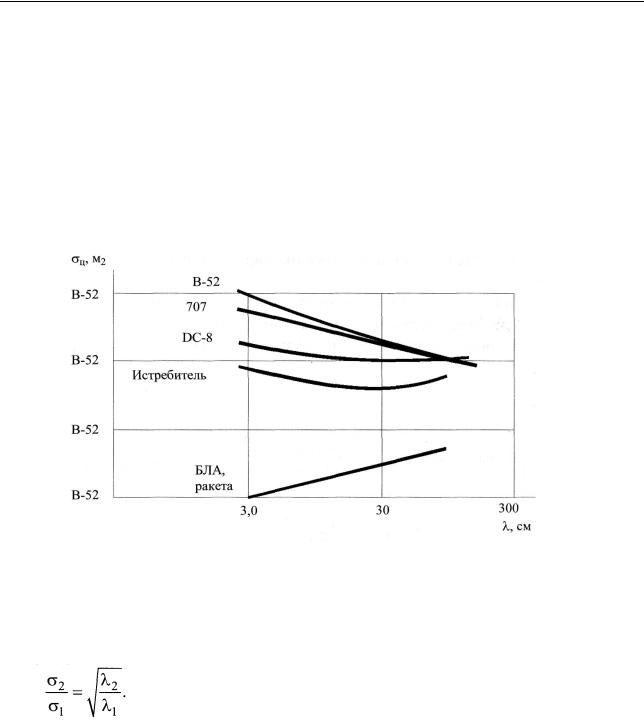
Таблица 2.2
Воздушная цель |
В-52 |
С-130 |
Р-ЗВ |
F-18A |
F-16 |
БЛА |
||
ЭПР, м2 |
Х-диапазон |
125 |
80 |
14 |
11 |
3 |
0,1 |
|
Р-диапазон |
10 |
10 |
10 |
10 |
3 |
0,5 |
||
|
||||||||
С увеличением длины волны РЛС от λ = 3 до λ = 70 см (Р-диапазон) ЭПР самолетов большого размера уменьшается (рис. 2.3). Так, ЭПР стратегического бомбардировщика В-52 уменьшается в 10 раз, а ЭПР истребителя почти не из меняется.
Рис. 2.3
Беспилотные летательные аппараты, так же как и крылатые ракеты, уве личивают ЭПР при возрастании длины волны. При облучении в переднем сек торе и изменении длины волны от λι κ λ2 ЭПР возрастает по закону
Использование технологии СТЭЛС (специальная конструкция самолета, поглощающие покрытия) значительно снижает ЭПР целей. В табл. 2.3 пред ставлены возможные значения ЭПР целей разрабатываемых самолетов как обычной технологии, так и технологии СТЭЛС в Х-диапазоне.
В длинноволновых L-, Р-диапазонах эффективность радиопоглощающих покрытий резко падает, а широкополосные покрытия имеют недопустимо большие геометрические размеры (толщину и массу). Так, например, покрытие МХ-1, обеспечивающее поглощение 25 дБ только в Х-диапазоне, имеет толщину
Таблица 2.3
Класс СВН |
Ракурс, |
|
Значения ЭПР, м |
|
|
град |
λ = 3 см |
|
λ = 10 см |
λ = 40 см |
|
|
|
||||
Стратегическая авиация: |
±45 (нос) |
70/0.3...3 |
|
75/0.3...5 |
60/0.5... 10 |
±45 (борт) |
80/1...30 |
|
70/1...30 |
60/1...40 |
|
обычный, Стеле |
|
||||
±45 (хвост) |
100/0.5... 10 |
|
120/0.5...10 |
90/0.5...20 |
|
|
|
||||
Тактическая авиация: |
±45 (нос) |
4/0.1...0.5 |
|
4/0.1...0.5 |
6/0.2...0.7 |
±45 (борт) |
5/0.5...0.7 |
|
6/0.5-0.7 |
9/0.5...0.7 |
|
обычный, Стеле |
|
||||
±45 (хвост) |
5/0.2...0.4 |
|
5/0.2...0.1 |
8/0.2...0.4 |
|
|
|
||||
|
±45 (нос) |
5...13 |
|
6...13 |
7...12 |
Армейская авиация |
±45 (борт) |
9...30 |
|
10...30 |
10...12 |
|
±45 (хвост) |
3...10 |
|
6...10 |
7...10 |
|
±45 (нос) |
4...9 |
|
4...12 |
6...7 |
Авиация ВМС |
±45 (борт) |
6...16 |
|
6...23 |
9...14 |
|
±45 (хвост) |
4...5 |
|
6...13 |
5...7 |
Военно-транспортные |
±45 (нос) |
90...250 |
|
90...300 |
100...400 |
±45 (борт) |
100...350 |
|
100...350 |
150...400 |
|
самолеты |
|
||||
±45 (хвост) |
80...200 |
|
80...250 |
80...350 |
|
|
|
||||
Самолеты ДРЛО и У |
±45 (нос) |
50/18 |
|
50/20 |
50/20 |
±45 (борт) |
80/35 |
|
70/35 |
70/40 |
|
Е-ЗС/Е-2С |
|
||||
±45 (хвост) |
100/15 |
|
80/15 |
70/15 |
|
|
|
||||
|
±45 (нос) |
0.05 |
|
0.05 |
0.2 |
БЛА |
±45 (борт) |
0.3 |
|
0.4 |
0.5 |
|
±45 (хвост) |
0.15 |
|
0.2 |
0.3 |
2 мм и массу 7 кг на квадратный метр. Широкополосное покрытие NZ-1 обес печивает поглощение 20 дБ в Х-, Р-диапазонах, но имеет толщину 25 мм и мас су 41 кг на квадратный метр.
Следует выделить «самолет-невидимку» В-2А, в котором максимально использованы все достижения технологии СТЭЛС и получен наиболее низкий уровень ЭПР в Х-диапазоне 10-2... 10_3 м2 (оценочные значения). С увеличени ем длины волны, начиная с λ = 30 см, эффективность технологии СТЭЛС сни жается и при λ = 70 см ЭПР возрастает на 10.. .20 дБ.
Типовые характеристики крылатых ракет воздушного и морского базирова ния представлены в табл. 2.4. Оперативно-тактическая ракета типа АТАКМАС имеет длину 3,98 м и диаметр 0,61 м.
Таблица 2.4
Тип |
Длина, м |
Размах крыла, м |
Скорость, км/ч |
Минимальная |
|
высота, м |
|||||
|
|
|
|
||
AGM |
6,32 |
3,65 |
600...900 |
60... 100 |
|
AGM |
6,35 |
зд |
600...900 |
30...200 |
|
Томахок 5 |
5,56 |
2,5 |
600...900 |
30...100 |
|
|
|
|
|
15 над водой |
В табл. 2.5 представлены оценочные значения ЭПР ракет, полученные расчетным путем.

Таблица 2.5
Тип |
Сектор углов, град |
λ = 3 см |
λ = 10 см |
λ = 23 см |
|
AGM-86fl |
0±45 |
0,15 |
0,2 |
0,5 |
|
90±45 |
1,5 |
1,5 |
4,0 |
||
|
|||||
ТОМАХОК |
0±45 |
0,15 |
0,3 |
0,4 |
|
90±45 |
0,5 |
2,0 |
2,5 |
||
|
|||||
|
|
|
|
|
|
АТАКМАС |
0±45 |
0,01 |
0,02 |
0,03 |
|
90±45 |
0,26 |
0,36 |
0,54 |
||
|
|||||
|
|
|
|
|
При относительно небольшом разрешении, характерном для БРЛС ком плексов типа АВАКС, воздушная цель является точечной. Она имеет один эк вивалентный фазовый центр отражения, определяемый векторной суммой электромагнитных волн всех отражателей.
Амплитуда  где ση - конкретное значение ЭПР n-й точки функции
где ση - конкретное значение ЭПР n-й точки функции
отражения цели, и фаза φη - фаза этой точки, являются случайными величина ми. Распределение плотности вероятности случайной фазы равновероятное (0...2π), а распределение амплитуды зависит от типа цели и условий наблюде ния. Обычно распределение амплитуд считают рэлеевским, а распределение ЭПР - экспоненциальным.
Так как воздушная цель при наблюдении в переднем секторе содержит не сколько преобладающих по мощности отражателей (сопла двигателей, антен ны, кромки крыльев и т. п.), распределение плотности вероятности ЭПР иногда представляют функцией «хи-квадрат с четырьмя степенями свободы»):
Случайное значение ЭПР цели σ есть модуль результата векторного сло жения комплексных амплитуд сигналов N отражателей:
Среднее значение ЭПР цели ац есть сумма ση средних значений ЭПР N точек:
Временные характеристики сигналов, отраженных воздушной целью, оп ределяются в основном изменением вектора скорости цели относительно РЛС