

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfдоступны как для данного комплекса, так и для его надсистемы в течение вре мени функционирования, что приводит к необходимости оценки данного пока зателя с учетом априорных свойств используемых алгоритмов обработки ин формации и текущей оценки обстановки.
В указанных условиях для оценки состояния информационной подсисте мы АК РЛДН и выработки управляющих воздействий используется иерархиче ская система частных показателей, отражающих качество отдельных этапов обработки информации и качество решения отдельных задач разведки обста новки.
Частные характеристики качества информации, выдаваемой комплек сом РЛДН, с учетом решаемых им задач можно описать вектором характери
стик |
, однозначно определяющим эффективность обеспе |
чения потребителей информации:
где  - вектор пространственно-временных характе
- вектор пространственно-временных характе
ристик формируемых зон информации ι - реализуемые конфигу рации областей соответственно постоянного, периодического контроля, АТС - продолжительность существования формируемой зоны информации относи тельно «текущего» времени);
- реализуемые конфигу рации областей соответственно постоянного, периодического контроля, АТС - продолжительность существования формируемой зоны информации относи тельно «текущего» времени);  - вектор точност ных характеристик выдаваемой траекторной информации
- вектор точност ных характеристик выдаваемой траекторной информации  - погреш ности оценки соответственно плоскостных координат и высоты, σΨ - погреш ности оценки курса движущихся объектов );
- погреш ности оценки соответственно плоскостных координат и высоты, σΨ - погреш ности оценки курса движущихся объектов );  -
-
вектор характеристик полноты информации ( N^aKC^ - максимальное число со
провождаемых целей, |
- относительная продолжительность непрерывного |
сопровождения целей, |
ΔΤΡ - относительная продолжительность разрывов |
трасс); |
- вектор характеристик достоверно |
сти выходного информационного процесса  - коэффициенты ложных трасс соответственно по числу и относительному времени сопровожде
- коэффициенты ложных трасс соответственно по числу и относительному времени сопровожде
ния, |
- относительное время существования ложных трасс). |
Для АК РЛДН в зависимости от решаемых задач, динамики изменения требований к информативности, типа взаимодействующего с ним потребителя

состав учитываемых значимых характеристик в векторах 
может быть различным.
Анализ коррелированности учитываемых характеристик информативности БРЛС АК РЛДН, проведенный на основе имитационного моделирования аль тернативных вариантов цифровой обработки Ρ ЛИ, показал [9], что при исполь зовании различных механизмов управления объективно наблюдается эффект улучшения значений одних групп показателей и ухудшение других. Это не по зволяет обеспечить расчленение управляемого процесса формирования ВИП, изолированное управление по каждому из вышеназванных показателей Vx и
как следствие максимальный эффект от применения комплекса РЛДН в изме няющихся условиях целевой и помеховой обстановки.
При исходной многокритериальности решаемой задачи для конструирова ния конфликтно-устойчивого критерия выбора альтернатив используем обоб щенный показатель информативности - вероятность того, что представитель ное множество характеристик информативности комплекса будет гарантирован но находиться в заданной надсистемой многомерной области значений. Это позволит «обеспечить» для разделяемых во времени требований к информа тивности комплекса, определяемых текущими решаемыми им задачами на вы деляемых неравнодискретных временных интервалах (ΔΤ Φ const), обеспечить «включение» и однозначный выбор эффективных вариантов цифровой обра ботки РЛИ. Тогда, используя известный адаптивный подход для дискретно фиксируемых параметров обстановки в зоне действия БРЛС АК РЛДН, реализуе мый вариант решения представим следующей последовательностью операций:
генерация возможных вариантов обработки  информа
информа
ции на борту АК РЛДН; имитационное моделирование вариантов обработки РЛИ с оценкой харак
теристик информативности комплекса  на множестве реализаций;
на множестве реализаций;
восстановление по результатам статистических испытаний совместных функций плотностей распределения вероятностей (ФПРВ)  учитываемых характеристик информативности;
учитываемых характеристик информативности;
запись множества значений совместных ФПРВ в специализированную вы числительную систему обработки и управления;
идентификация текущих условий применения  , определяе мых изменяющимися, но фиксируемыми на интервале
, определяе мых изменяющимися, но фиксируемыми на интервале  параметрами целе
параметрами целе
вой и помеховой обстановки; |
|
определение изменяющихся, но фиксируемых на интервале |
требо- |
ваний Vx к информативности комплекса на различных этапах применения;

выбор наиболее эффективного варианта цифровой обработки по крите
цифровой обработки по крите
рию максимизации обобщенного показателя информативности
Ниже представлены результаты многокритериального механизма выбора минимально достаточного числа эффективных режимов цифровой обработки РЛИ комплекса, взаимодействующего с разнородными потребителями инфор
мации. Заданы следующие разделяемые во времени условия обработки: |
|
|||||
раздельное |
сопровождение |
разрешаемых |
воздушных |
целей |
||
|
сопровождение |
групповых |
целей |
|
||
|
|
автосопровождение малоскоро |
||||
стных или маневрирующих ВЦ или |
|
|
|
осуществление об |
||
работки при |
повышенной интенсивности |
потока |
|
ложных |
отметок |
|
|
|
и в условиях |
|
радиоэлектронно |
||
го противодействия БРЛС.
При обосновании эффективных вариантов обработки, переключаемых в зависимости от условий применения, получены следующие варианты [9]:
fri - основной режим обработки координатной информации с двухэтапной процедурой обнаружения траекторий, оптимизированный для сопровождения с высоким качеством прямолинейно движущихся целей;
fr2 - режим с управляемым порогом обнаружения, обеспечивающий улуч шение непрерывности сопровождения в ограниченной области пространства по приоритетным ВЦ. Элементы разрешения, в которых допускается снижение порога обнаружения, определяются в системе цифровой обработки РЛИ с уче том назначенных приоритетов;
fr3 - режим с управляемым критерием захвата, обеспечивающий при усло вии выполнения требований по достоверности увеличение дальности начала выдачи траекторной информации;
fr4 - режим сопровождения маневрирующих целей, обеспечивающий по вышение непрерывности сопровождения одиночных целей, совершающих ма невры различной интенсивности;
fr5 - режим сопровождения групповых целей, обеспечивающий повышение устойчивости сопровождения ВЦ, имеющих близкие кинематические параметры;
fr6 - режим управления числом каналов сопровождения, обеспечивающий повышение производительности БРЛС в условиях работы по массированным на летам, например, путем включения упрощенного режима вторичной обработки РЛИ с использованием а-, β-фильтрации и неоптимальной селекции отметок;
fr7 - режим управления критерием сброса траекторий с сопровождения, учитывающий информационные ограничения в комплексах данного класса, например при организации комбинированного управления одновременно как параметрами движения самолета-носителя и режимами функционирова ния БРЛС.
Для реализации конфликтно-устойчивого выбора вариантов цифровой об работки информации путем целенаправленного последовательного «включе ния» обоснованных управляемых режимов по результатам ими тационного моделирования режимов требуется осуществить восстановление с использованием многомерных функций плотностей распределения вероятно стей характеристик информативности комплекса. Для оценки данных функций можно использовать критерии согласия Колмогорова и хи-квадрат.
Пусть  - параметрически заданное множество условий функцио нирования БРЛС с трассовым выходом. Для конкретных значений
- параметрически заданное множество условий функцио нирования БРЛС с трассовым выходом. Для конкретных значений  получены путем имитационного моделирования выборки исследуемой i-й ха рактеристики
получены путем имитационного моделирования выборки исследуемой i-й ха рактеристики  на момент времени
на момент времени . На основе экспертного анализа формируются возможные законы распределения,
. На основе экспертного анализа формируются возможные законы распределения,
которым может подчиняться случайная величина |
, |
|
|
- вектор параметров, определяющих функцию распределения |
|
F (·) j-ro закона распределения. |
|
|
|
По полученным в результате имитационного моделирования выборкам |
|
YPi |
необходимо получить оценку для отображения |
|
(Θ |
- множество возможных значений параметров j-й функции распределе |
|
ния). Отображение F сопоставляет каждому значению ξ из множества допус |
||
тимых условий функционирования комплекса некоторые значения |
со |
|
ответствующие номеру закона распределения и вектору параметров соответст вующей функции распределения.
Решение представленной задачи состоит из двух этапов: оценки закона рас пределения исследуемой характеристики ВИП YPi для конкретного значения ξ из возможного диапазона условий функционирования комплекса Ω ξ на первом этапе и аппроксимации отображения ρ по полученным оценкам этого отображе
ния |
для конечного множества значений на втором этапе: |
к = |
1,...,М. |

Вследствие того, что критерий согласия χ2 предполагает предваритель ную группировку выборочных данных (что приводит к потерям информации при ограниченных объемах выборок), целесообразно использовать более точ ный критерий Колмогорова. В дальнейшем частная задача первого этапа со-, стоит в проверке сложной гипотезы о принадлежности неизвестной функции распределения наблюдаемой в опыте случайной величины Ypi заданному се мейству функций распределения:
Критерий согласия Колмогорова, как известно, основан на вычислении статистики:
где |
- эмпирическая функция распределения случайной величины YPi, |
построенная по выборке  N - объем выборки;
N - объем выборки;
где 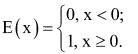
Поскольку проверяемая гипотеза является сложной, то значе ния статистики DN зависят от номера проверяемой функции распределения j = l,...,k и соответствующего вектора параметров этой функции Θ:. Поэтому
для принятия решения необходимо оценить также параметры закона распреде ления случайной величины Ypi. С этой целью предварительно для каждого j = 1,..., k решается оптимизационная задача
На втором этапе определяются оптимальные параметры  I,
I,
к = 1,..., Μ , на множестве условий работы численными методами аппроксима ции функций многих переменных. Однако при использовании различных вари антов цифровой обработки в БРЛС требуется раздельное восстановление зако нов распределения для фиксированных условий работы, что позволит оценить возможности адаптации комплекса к условиям применения.

При недостаточной точности аппроксимации законов распределения ха рактеристик ВИП при проектировании реализуется статистическая обработка результатов моделирования функционирования АК РЛДН с использованием метода гистограмм.
Определим ФПРВ учитываемых характеристик информативности АК РЛДН путем имитационного моделирования режимов  ,
,
что равнозначно оценке безусловной совместной функции распределения векторного случайного процесса для фик сированного момента времени на конечном множестве характеристик инфор мативности пх , внедряемых вариантов цифровой обработки Мр РЛИ и разде ляемых прогнозируемых условий функционирования Νγ комплекса.
При восстановлении совместной ФПРВ векторного случайного процесса , в частности при имита ции процесса траекторной обработки РЛИ результаты отдельного испытания с
номером i представляют как вектор характеристик
Для получения аппроксимаций ФПРВ вектора YP на основании выбороч ных данных (ΝΗ - число проведенных испытаний) строятся выборочные функции распределения как для отдельных компонентов вектора ΥΡ (в виде функций одного аргумента), так и для нескольких компонентов (в
виде функций от нескольких аргументов).
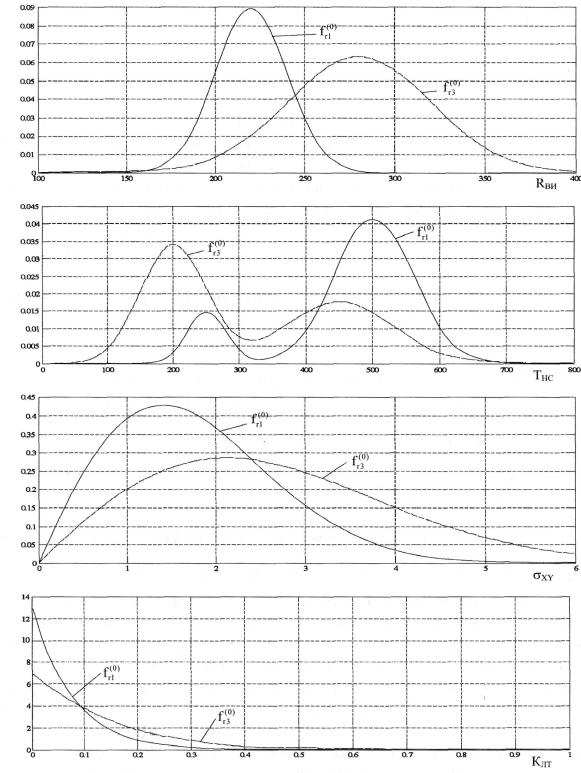
На рис. 4.9 приведены результаты восстановления ФПРВ дальности захва та траекторий (Д в и ), среднего времени непрерывного сопровождения (Тн с ), погрешности оценки плоскостных координат  и коэффициента ложных
и коэффициента ложных
трасс ( К л т ) для альтернативных вариантов обработки  соответст
соответст
венно, характеризующих эффект коррелированности и размена характеристик информативности при «включении» в работу различных механизмов управле ния цифровой обработкой РЛИ.
Корреляционные связи характеристик определяются по коэффициентам
ковариационной матрицы  Выбор групп независимых характеристик проводится следующим образом.
Выбор групп независимых характеристик проводится следующим образом.
Исключаются характеристики, для которых наблюдается сильная корре ляция с другими характеристиками. Это условие соответствует наличию явно
выраженной функциональной зависимости между отдельными характеристи ками. Далее группируются характеристики по признаку отсутствия корреляции между различными группами.
Рис. 4.9

В процессе исследования ковариационной матрицы А в условиях воздей ствия на БРЛС активных помех выявлены следующие основные группы харак
теристик |
информативности [9, 13]: |
Закон распределения второй и третьей групп характеристик (ошибки определения плоскостных параметров траектории и высоты) с высокой точно стью аппроксимируется многомерным нормальным законом распределения, параметры которого определяются в процессе фильтрации измерений и зависят от длительности сопровождения и расстояния до цели. Первая группа характе ристик может быть представлена в виде нескольких независимых подгрупп ха рактеристик в зависимости от конкретных условий и режимов обработки ин формации. В результате совместная ФПРВ характеристик информативности АК РЛДН может быть представлена в виде произведения совместных функций плотности вероятности распределения независимых подгрупп характеристик:
Для ФПРВ характеристик первой группы элементарные функции распре деления в большинстве случаев не соответствуют друг другу, однако их рас пределение можно достаточно точно аппроксимировать линейной комбинаци ей известных ФПРВ в следующем виде:
где j - номер варианта цифровой обработки; .- номер условий функционирова
ния; |
- отдельные ФПРВ учитываемых характеристик. |
Всвязи с возможностью такого аналитического представления ФПРВ ха рактеристик траекторной информации данные о законах их распределения мо гут быть сведены в таблицы и записаны в память бортовой вычислительной системы АК РЛДН. Это позволит в условиях воздействия активных помех на комплекс учесть неоднозначность влияния различных механизмов управления цифровой обработкой РЛИ на информативность БРЛС и повысить на этой ос нове возможности ее адаптации к изменяющимся условиям применения.
Вдинамике антагонистического конфликта могут использоваться различ ные механизмы управления информативностью (рис. 4.10) проектируемой сис темы [10].
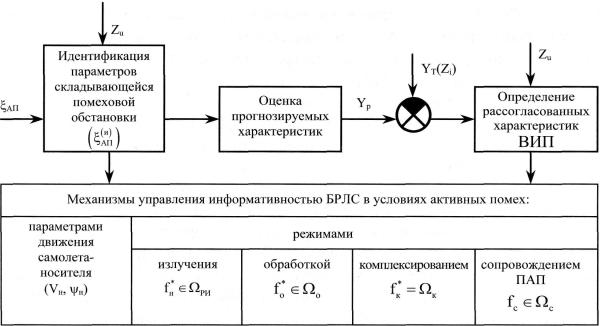
Рис. 4.10
В частности, в процессе обнаружения целей может быть предусмотрено несколько режимов зондирования пространства, переключаемых в зависимости от требований к выходным информационным потокам по решаемым задачам с учетом идентифицируемых параметров активных помех, воздействующих на данный ИД. При работе по «мерцающим» ПАП и воздействии на БРЛС им пульсных и непрерывных маскирующих активных помех требуется организо вать управление режимами комплексирования и обработки информации с уче том конкретных решаемых задач и определяемых в динамике применения па раметров складывающейся помеховой обстановки.
Использование конфликтно-устойчивых алгоритмов управления процес сами добывания и обработки информации в системе приводит к тому, что структура обработки информации и порядок добывания информации оптими зируются таким образом, чтобы обеспечить максимальное качество решения задач, а с учетом ограничений, направленных на снижение возможностей про тивника по разведке процесса функционирования АК РЛДН и оптимизации эффективности в условиях определенных видов помех. Необходимым услови ем для обеспечения конфликтно-устойчивого управления является непрерыв ное наблюдение за складывающейся помеховой обстановкой, включающее об наружение, сопровождение постановщиков активных помех, а также оценку их возможностей по разведке функционирования БРЛС АК РЛДН. В данном слу чае появляется взаимная зависимость процессов функционирования БРЛС и противодействующих ей средств РЭП, что приводит к нестационарному харак теру поведения обеих сторон в динамике конфликта. Конечный результат, про являющийся в значениях частных характеристик качества выдаваемой инфор-
мации и обобщенного показателя эффективности функционирования системы, зависит от применяемых стратегий управления обеих сторон и от всего много образия значений управляемых параметров, доступных каждой из сторон. На личие слабых сторон в управлении процессом обработки информации в усло виях целенаправленного радиоэлектронного подавления, характеризующегося ведением разведки функционирования АК РЛДН и координацией действий средств создания помех, приводит к реализации противником таких способов РЭП, при которых эти слабые стороны проявляются в наибольшей степени.
В то же время, при несовершенстве стратегии радиоэлектронного подавления или недостаточном числе приемов и способов радиоэлектронного подавления у противника, эффективное конфликтно-устойчивое управление за счет снижения уровня информированности противника о действиях АК РЛДН и выбора наиболее эффективных способов обработки и добывания информации в идентифицирован ной помеховой обстановке позволяет избежать силовых способов радиоэлектрон ного подавления и тем самым обеспечить функционирование комплекса при зна чительно более низких уровнях помех. Это приводит к приближению частных по казателей качества функционирования до потенциально достижимых в безпомеховой обстановке. Указанные особенности, связанные с нестационарно стью поведения системы «АКРЛДН - комплекс РЭП», создают определенную сложность адекватной оценки полезного эффекта от внедрения конфликтноустойчивого управления, для описания которой необходима достаточно подробная имитационная модель функционирования не только АК РЛДН, но и средств РЭП, отражающая все составляющие радиоэлектронного конфликта.
Рассмотрим применение предложенных принципов для построения алго ритма управления БРЛС, содержащей следующие ИД:
многорежимную радиолокационную станцию; канал пеленгации целей ПАП; станцию радиотехнической разведки.
Исходное множество помеховых воздействий, создаваемых противостоящей стороной, содержит различные виды помех, для которых формируется оптималь ный режим функционирования БРЛС. В динамике конфликта возможные управ ляемые режимы процессов формирования ВИП в условиях полного (частичного) радиоэлектронного подавления БРЛС АКРЛДН представлены на рис. 4.10. В ча стности, в процессе обнаружения целей может быть предусмотрено несколько ре жимов зондирования пространства, переключаемых в зависимости от требований к информативности, решаемых задач, видов и параметров активных помех, воз действующих на данный ИД. При работе по «мерцающим» ПАП, воздействии на БРЛС импульсных и непрерывных маскирующих активных помех требуется орга низовать управление режимами комплексирования и обработки информации в АК РЛДН с учетом конкретно решаемых задач и определяемых в динамике при менения параметров складывающейся помеховой обстановки.