

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfДля построения реализуемых алгоритмов конфликтно-устойчивого управ ления БРЛС предлагается подход, при котором вводится иерархия, соответст вующая принятым моделям двухсторонних действий, стратегий управления, что позволяет разделить задачу синтеза многомерного управления на отдель ные составляющие.
Бортовая радиолокационная система (система Σχ ) содержит совокупность информационных датчиков (ИД) Dk , k = 1,...,N, каждый из которых может функционировать в нескольких режимах:  Каждый режим ха рактеризуется набором непрерывных и дискретных параметров
Каждый режим ха рактеризуется набором непрерывных и дискретных параметров Об работку информации от ИД и формирование результирующих сведений об об становке можно выполнять в нескольких режимах г™, т = 1,...,М0, каждый из которых характеризуется значениями параметров
Об работку информации от ИД и формирование результирующих сведений об об становке можно выполнять в нескольких режимах г™, т = 1,...,М0, каждый из которых характеризуется значениями параметров  Поэтому значение управления БРЛС представляется как выборка, состоящая из N +1 элементов:
Поэтому значение управления БРЛС представляется как выборка, состоящая из N +1 элементов:  где через Ux обозначено множе
где через Ux обозначено множе
ство значений управлений БРЛС.
Управление функционированием БРЛС представляет собой функцию вида  , где Τ - интервал времени. Множество реализуемых управлений
, где Τ - интервал времени. Множество реализуемых управлений
РЭС обозначается через Rx . В процессе функционирования БРЛС при целена
правленном выборе управления  происходит уточнение информации о разведываемых объектах. Совокупность параметров, характеризующих в каждый момент времени степень информированности БРЛС о разведывае мой обстановке, можно рассматривать как состояние БРЛС. Тогда множест во значений этих параметров можно рассматривать как пространство со-
происходит уточнение информации о разведываемых объектах. Совокупность параметров, характеризующих в каждый момент времени степень информированности БРЛС о разведывае мой обстановке, можно рассматривать как состояние БРЛС. Тогда множест во значений этих параметров можно рассматривать как пространство со-
стояний: sx е Ω χ . В силу инерционности процесса добывания информации
изменение состояния БРЛС во времени подчиняется некоторому закону, ко торый может быть описан при помощи функции перехода состояний:
где под φγ (·) имеется в виду совокуп ность параметров, характеризующих изменение внешних факторов, воздейст вующих на БРЛС, которые не зависят от управления БРЛС. Внешние условия для БРЛС представлены параметрами обстановки, характеризующими свойства разведываемых объектов (целей) и помеховую обстановку, создаваемую про тивостоящей стороной (система Σγ). Следует отметить, что на процесс форми рования информации об обстановке БРЛС влияет большое число случайных факторов, не обязательно связанных с конфликтным характером условий функционирования БРЛС; следовательно, состояния sx могут быть представ лены в терминах теории случайных процессов как элементы функционального

пространства, а функция перехода - в виде стохастического дифференциально го уравнения.
Аналогично параметры у п р а в л е с т е м ы Σγ содержат описа ние свойств передатчиков помех и параметров излучаемых помех, включая пространственное распределение излучений. Помеховые воздействия uY могут быть представлены в виде множества помех  и соответствующих им множеств параметров помех
и соответствующих им множеств параметров помех  . В результате помеховое воздействие
. В результате помеховое воздействие
представляется в виде Управление функционированием системы Σγ представляет собой функцию
Управление функционированием системы Σγ представляет собой функцию
вида  , множество реализуемых управлений обозначается через RY, а элементы пространства состояний
, множество реализуемых управлений обозначается через RY, а элементы пространства состояний  . Учитывая, что система Σ7 со держит подсистему разведки радиоэлектронной обстановки, под ее состоянием можно понимать численную меру степени осведомленности о действиях БРЛС.
. Учитывая, что система Σ7 со держит подсистему разведки радиоэлектронной обстановки, под ее состоянием можно понимать численную меру степени осведомленности о действиях БРЛС.
Изменение состояния системы РЭП может быть представлено функцией пере
хода состояний |
- совокуп |
ность параметров, характеризующих изменение внешних факторов, воздейст вующих на систему РЭП. Множества Ux , UY определяют энергетические ог раничения, a R x , RY - динамические ограничения на управления этих систем. Динамика изменения обстановки задается в виде функции v(t), а изменение состояния можно представить переходной функцией 
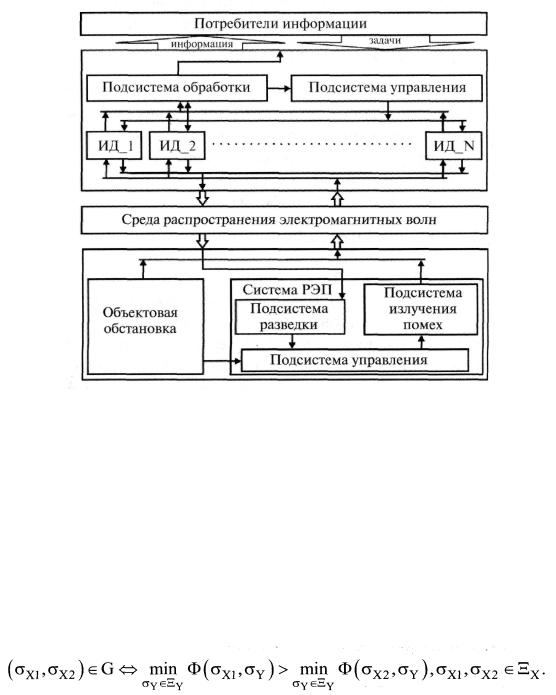
Схема конфликта БРЛС и системы радиоэлектронного подавления помех пока зана на рис. 4.1. Множества стратегий управления БРЛС и системы РЭП, кото рые определены в [5], обозначим через  соответственно.
соответственно.
Обобщенный показатель эффективности функционирования БРЛС
АК РЛДН определяется как степень его способности выполнять решаемые за дачи по обеспечению потребителей информацией [7] и может быть численно представлен как вероятность обеспечения потребителей информацией требуе мого им качества. Разведываемая обстановка V содержит объекты vl9 ..., vL ,
информация о которых требуется потребителям в соответствии с решаемыми задачами Ζ. Каждый из этих объектов обладает рядом демаскирующих при знаков, доступных для наблюдения отдельными ИД.
Характеристики информативности об объекте Vj определяются соответст вующим частным показателем, значения которого зависят от режима работы ИД, параметров этого режима и воздействующих на него помех:
 Значения этого частного показателя характеризуют
Значения этого частного показателя характеризуют
также и степень подверженности ИД воздействию помех. В результате каждому моменту времени может быть поставлен в соответствие набор частных показате лей информативности БРЛС о разведываемых объектах:  Ре зультирующая информация об обстановке формируется на основании данных, полученных всеми ИД. В зависимости от режима обработки информации, по лученной от разнотипных ИД, обобщенный показатель эффективности функ ционирования БРЛС является функционалом
Ре зультирующая информация об обстановке формируется на основании данных, полученных всеми ИД. В зависимости от режима обработки информации, по лученной от разнотипных ИД, обобщенный показатель эффективности функ ционирования БРЛС является функционалом 
Рис. 4.1
На всем интервале времени функционирования эффективность РЭС опре деляется интегральным показателем  , который отражает
, который отражает
способность БРЛС решать задачи информационного обеспечения потребителей в течение заданного интервала времени.
Поскольку критерии выбора стратегий управления сторонами, участвующи ми в конфликте, прямо противоположны, отношение предпочтения G cz Ξχ χ Ξχ в задаче выбора стратегии управления с точки зрения стороны χ может быть за дано следующим условием:
Тогда выбор оптимальной стратегии управления для БРЛС осуществляет ся путем решения задачи выбора:
где  - отношение предпочтения, сформированное при оптимальных стра тегиях управления системой РЭП.
- отношение предпочтения, сформированное при оптимальных стра тегиях управления системой РЭП.
Применение принципов управления БРЛС, которые отражают наиболее общие свойства оптимальных стратегий получения конечной цели, направлено на снижение размерности приведенной задачи выбора. Эти принципы могут быть выражены в терминах частных отношений предпочтения в виде
Из рис. 4.1 следует, что БРЛС может быть представлена как иерархическая система, содержащая два уровня, что позволяет осуществить декомпозицию управления системой по различным иерархическим уровням. Тогда, может быть установлен принцип иерархической организации оптимального управления (GXi) [11], который состоит в том, что выбор управления РЭС осуществляется в пред положении, что стратегии управления информационных датчиков оптимальны:
Выбор управлений каждой из сторон выполняется в динамике функцио нирования по информации о складывающихся условиях и действиях противо стоящей стороны, т. е. с использованием оперативной идентификации процес сов по проводимым измерениям. Изменение параметров помехового воздейст вия с течением времени приводит к неадекватности выбранного принципа оптимальности и к выбору режима функционирования БРЛС в соответствии с данным принципом оптимальности. Для выполнения этого условия могут при меняться следующие принципы.
Принцип адаптивно-управляемого функционирования БРЛС (стратегия Gx2) Суть данного принципа состоит в том, что задача выбора стратегии управ ления σχ в динамике функционирования БРЛС осуществляется при изменяю щемся во времени отношении предпочтения G(t), которое зависит от прогнози руемой точности идентификации помеховой обстановки.
Поскольку для получения результатов наблюдения каждый из режимов работы БРЛС занимает определенное время, изменение параметров и режимов управления должно быть согласовано с переходными процессами при добыва нии информации о целевой и помеховой обстановке, должен соблюдаться
принцип согласованности динамичности управления БРЛС с изменением пара метров помеховой обстановки ( GX3).

Принцип динамического прогноза изменения параметров помеховой об становки (стратегия GX4). Суть данного принципа в том, что осуществляет ся экстраполяция параметров помеховой обстановки на интервал времени, превышающий длительность переходных процессов в БРЛС:
где FY - функция прогноза, построенная на основе восстановленной модели действий противостоящей стороны. В результате, выбор управления БРЛС осуществляется путем решения задачи выбора значения их для прогнозируе мого интервала времени At.
С учетом целенаправленности создания помеховой обстановки противо стоящей стороной и наличия неопределенности относительно режима функ ционирования БРЛС выбор значений у осуществляется на основании отноше
ния предпочтения |
с использованием модели функционирования |
БРЛС при неопределенности |
относительно значения φχ (·). Следовательно, |
выбор таких режимов работы БРЛС, при которых выполняется принцип скрытности функционирования БРЛС (Gxs), позволяет снизить возможности системы РЭП по созданию адекватной помеховой обстановки, минимизирую щей эффективность функционирования БРЛС.
Кроме того, предполагая, что система РЭП выполняет также прогноз со стояния БРЛС, используя для этого модель поведения Fx (·), эффект неопреде ленности о состоянии БРЛС можно усилить путем применения принципа де зинформации (стратегия Gxe).
В связи с тем, что ИД имеют различные пространства наблюдаемых пара метров, при формировании управления необходимо соблюдать принцип управ ляемого комплексирования и совместной обработки информации от разнотип ных информационных датчиков БРЛС (стратегия GX7), который предполагает сужение множества Ux только на те совокупности ИД, которые обеспечивают
потребителям требуемый состав информации об обстановке.
Также возможно применение принципа динамической автокомпенсации воздействий помех (стратегия GX8), суть которого состоит в применении мер
защиты от возможных видов помех.
Предложенные основные принципы управления БРЛС в условиях целена правленного изменения параметров помеховой обстановки позволяют снизить размерность задачи выбора оптимальной стратегии управления БРЛС и повы сить разведывательно-информационные возможности АК РЛДН.
4.2. Предложения по технической реализации заданного уровня помехозащищенности бортовой радиолокационной системы
Результатом воздействия активных и пассивных помех на БРЛС является снижение дальностей обнаружения, точностей определения координат целей, сопровождение ложных целей и т. д.
Для уменьшения влияния радиолокационных помех на БРЛС необходимо использовать различные технические способы и устройства [14, 18]:
фильтры помех; устройства бланкирования приемника; угловую селекцию;
дискриминаторы частоты повторения импульсов; дискриминаторы длительности импульсов; перестройку частоты БРЛС по диапазону излучения;
уменьшение ширины основного луча диаграммы направленности; уменьшение уровня боковых лепестков; компенсацию помех по боковым лепесткам;
формирование провалов ДН в направлении на постановщик помех и т. д. Действенной мерой обеспечения заданного уровня помехозащищенности
является использование адаптивного автокомпенсатора помех (АКП), реали зующего принципы динамической автокомпенсации маскирующих активношумовых помех.
Работа АКП основана на использовании дополнительного приемного кана ла, выделяющего помеху из смеси с полезным сигналом. Принятая по дополни тельному каналу помеха вычитается из совокупности полезного сигнала и поме хи, действующей на входе основного канала. Для приема помех, действующих по боковым лепесткам ДН, дополнительный приемный канал содержит специ альную ненаправленную компенсационную антенну с малым коэффициентом направленного действия (КПД). Коэффициент усиления компенсационной ан тенны должен соответствовать (быть не менее) уровню наибольшего из боко вых лепестков антенны основного канала. На выход вычитающего устройства проходят сигналы только в том случае, если сигналы основного канала больше сигналов компенсационного канала.
Структурная схема, поясняющая работу АКП, приведена на рис. 4.2, где s - полезный сигнал, отраженный от цели; χ - помеха, поступающая от источника помех на основной приемный канал; Χι - помеха, поступающая от источника помех на дополнительный приемный канал; у - выходной сигнал компенсаци онного фильтра (КФ), е - выходной сигнал компенсатора и одновременно те кущая погрешность адаптации.

Пусть s, χ, хь у стационарны, сигнал s не коррелирован с помехами χ и хь а х и Χι взаимно коррелированы.
Из рис. 4.2 видно, что  Следовательно,
Следовательно,
·>
где Е[·] означает математическое ожидание величины, заключенной в квадрат ные скобки.
чв
Рис. 4.2
Величина E[s ] представляет собой среднюю мощность сигнала. Если  то
то
|
(4.1) |
т. е. минимизация полной входной мощности |
соответствует полной ком |
пенсации помехи на выходе компенсатора или максимальному отношению сигнал/помеха.
Соотношение (4.1) является критерием компенсации по минимуму средне го квадрата ошибки (СКО).
Для эффективной компенсации помехи необходимо обеспечить весьма точное соответствие помех в основном и дополнительном каналах. Это требо вание можно выполнить, введя корреляционную обратную связь (КОС), кото рая позволяет уточнить коэффициент усиления дополнительного канала рав ным коэффициенту усиления основного канала, что и необходимо для компен сации помехи.
Подключение компенсационного канала проводится автоматически при появлении корреляции помех между основным и дополнительным каналами, т. е. при появлении внешних источников помех. При отсутствии помехи до полнительный канал заперт (коэффициент усиления дополнительного канала равен нулю) и на выход поступает сигнал только основного канала.
Если кроме равенства амплитуд в основном и дополнительном каналах обеспечить и равенство фаз, то помеху можно скомпенсировать не только по сле детектора, но и на высокой (промежуточной) частоте. Соответственно раз личают некогерентный и когерентный методы компенсации. Линейность ко герентных автокомпенсаторов за счет увеличения числа независимых по пара метру селекции дополнительных каналов позволяет компенсировать помехи, создаваемые одновременно несколькими источниками.
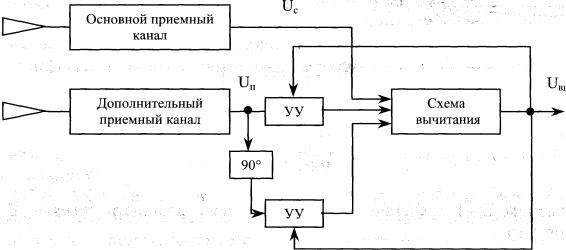
Одна из практических схем двухканального автокомпенсатора приведена на рис. 4.3.
Рис. 4.3
Здесь компенсационный канал разделяется на две параллельные ветви, в каждой из которых имеются управляемые усилители (УУ). Через первую ветвь проходит непосредственно сигнал, принятый компенсационной антенной, че рез вторую - тот же сигнал с поворотом фазы на 90°. Регулировка усиления в каналах позволяет управлять амплитудой и фазой суммарного сигнала.
За счет цепей обратной связи помеховые колебания, принятые компенса ционным каналом, автоматически становятся равными по амплитуде и проти воположными по фазе с колебанием основного канала. Происходит компенса ция помех. Этот вариант получил название автокомпенсатора с квадратур ными каналами. При необходимости число компенсационных каналов может быть увеличено. Здесь в обоих каналах используются супергетеродинные при-
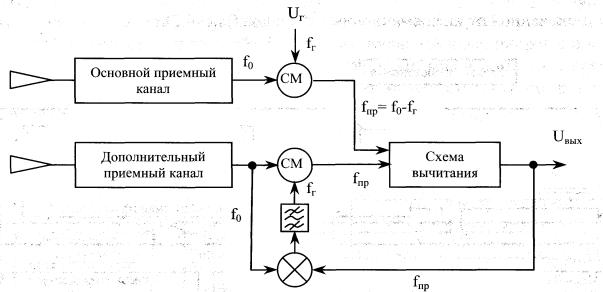
емники. В основном канале гетеродинное напряжение подается от независи мого генератора. Во вспомогательном канале амплитуда и фаза гетеродинного напряжения регулируются за счет обратной связи таким образом, чтобы помеховые колебания были также противофазными и равными по амплитуде с по мехой основного канала. Число компенсационных каналов также может быть увеличено.
Схема гетеродинного автокомпенсатора приведена на рис. 4.4.
иг
Рис. 4.4
Поскольку АКП представляет собой эффективное средство повышения помехозащищенности РЭС, то его внедрение в БРЛС АК РЛДН является необ ходимым.
Применяемые в современных отечественных БРЛС системы компенсации помех имеют ряд существенных недостатков, связанных с отсутствием управ ления диаграммами направленности опорных (компенсационных) антенных раскрывов этих каналов. Малоканальность систем АКП предопределяет фор мирование более широких компенсационных ДН для прикрытия довольно зна чительных секторов эффективного подавления БРЛС в условиях массирован ного налета СВН. Эти ДН, как правило, жестко фиксированы относительно главного луча ДН основного антенного раскрыва и в недостаточной степени перекрывают область эффективного подавления или отдельные направления.
Для того чтобы сформировать конфликтно-устойчивое управление БРЛС,
необходимо конкретизировать структуру системы, а также определить реали зуемые механизмы управления и зависимость показателей информативности системы в условиях воздействия активных помех. Практические предложения по организации конфликтно-устойчивого управления для БРЛС в интересах
разведки воздушных объектов в динамике конфликта со средствами радиоэлек тронного подавления заключаются в следующем.
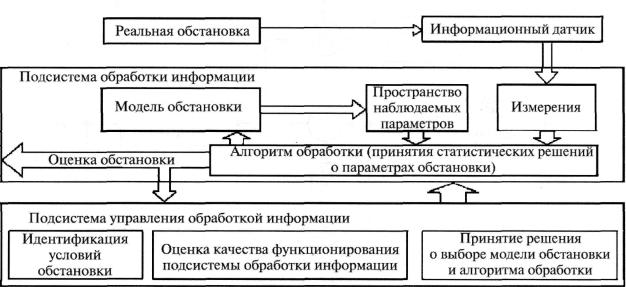
Процесс получения информации о реальной обстановке, осуществляемый с применением принципов конфликтно-устойчивого управления в динамике конфликта со средствами радиоэлектронного подавления, содержит модель це левой и помеховой обстановки, модель наблюдения, представляющую собой отображение модели обстановки в пространство наблюдаемых параметров и алгоритм принятия решения о параметрах обстановки на основании информа ции, полученной от информационных датчиков (рис. 4.5).
Рис. 4.5
Отсутствие управления процессами обработки информации в БРЛС при водит к тому, что структура подсистемы обработки оптимизируется по крите рию максимальной эффективности решения задач. В то же время противобор ствующая сторона осуществляет оценку режимов функционирования БРЛС и оптимизирует способы создания помех по критерию минимизации его разве дывательно-информационных возможностей.
Для обеспечния конфликтно-устойчивого управления БРЛС в дополнение к подсистеме цифровой обработки информации необходима реализация соот ветствующей подсистемы управления (рис. 4.5). Последняя выполняет функ ции по идентификации условий обстановки, апостериорной оценке качества функционирования БРЛС и динамического управления вариантами обработки на основе статистических решений о моделях складывающейся обстановки [9].