

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfОсновные требования к приемному устройству БРЛС:
обеспечение минимального уровня внутренних шумов БРЛС, который оп ределяет потенциальные возможности работы во всех режимах;
высокий динамический диапазон (линейность) усилительного тракта при емника (80 дБ и более), определяющий потенциальные возможности обнару жения низко летящих, малозаметных целей;
возможность селекции (стробирования) импульсных сигналов целей в за данном диапазоне задержек (дальностей);
возможность спектральной селекции (фильтрации на промежуточной час тоте) импульсных сигналов целей;
возможность сжатия импульсов цели на промежуточной частоте; возможность доплеровской фильтрации пачки когерентных импульсных
сигналов цели; возможность режекции когерентной пачки импульсных сигналов фона;
регулировка усиления сигналов (АРУ, ВАРУ); обеспечение стабильности фазовых характеристик тракта приемника;
ограничение мощных входных помеховых сигналов для предотвращения перегрузки последующих цепей приемника;
обеспечение преобразования аналоговых сигналов с выхода фазового детектора в цифровую форму (АЦП) с высоким динамическим диапазоном (до 80 дБ).
На рис. 2.12 представлена типовая структура приемного устройства БРЛС.
Рис. 2.12
В режиме работы антенны БРЛС на прием фазовращатели обеспечивают управление ДН по углу места.
С выхода фазовращателей высокочастотные колебания поступают в сис тему защиты приемника от мощных импульсных сигналов излучения своего передатчика, излучения РЛС соседних самолетов и станций активных помех. Для эффективного подавления высокочастотных импульсов и снижения чувст вительности при сильных сигналах используется до пяти ступеней защиты и регулировки (циркулятор, переключатель на pin-диодах, газоразрядные пере ключатели, аттенюаторы и др.). Следующий за системой защиты фильтр (преселектор) пропускает только сигналы БРЛС в рабочем диапазоне частот.
Авиационные комплексы радиолокационного дозора и наведения
Малошумящий усилитель (МШУ) усиливает все сигналы БРЛС в рабочей поло се частот. Основное назначение МШУ - обеспечить минимальный уровень спек тральной плотности внутренних шумов приемника с учетом шумов входных уст ройств (фазовращатели, зашита, аттенюатор, соединительные волноводы, фильтр).
Коэффициент усиления МШУ должен формировать такой уровень сигнала и шума, при котором последующие цепи приемника не увеличивают коэффи циент шума.
Втабл. 2.9 представлены типовые значения коэффициента шума Кш и динами ческий диапазон (ДД) различных МШУ. Следует отметить большой ожидаемый прогресс в разработке транзисторных усилителей с большим ДД и малым Кш.
ВБРЛС с механическим сканированием антенны МШУ находится непо средственно у антенны, а сигнал с МШУ поступает на распределительное уст ройство по различным приемникам через вращающийся переход.
Таблица 2.9
Параметры |
|
Устройства |
|
|
Балансный |
Усилитель |
Параметрический |
Транзисторный |
|
|
смеситель |
наЛБВ |
усилитель |
усилитель |
Кш |
9 |
5 |
4 |
3 |
ДД,дБ |
70 |
50 |
40 |
50 |
Высокочастотные сигналы на несущей частоте преобразуются на проме жуточную частоту (преобразователь частоты) и усиливаются при помощи УПЧ. Обычно используется двойное преобразование частоты.
На второй промежуточной частоте фазовый детектор (ФД) формирует квадратурные sin- и cos-видеосигналы.
Недостатком такого фазового детектора является необходимость тщатель ного подбора и калибровки отдельных sin- и cos-каналов для обеспечения вы сокого динамического диапазона выходных сигналов перед АЦП.
При наличии быстродействующих переключателей фазовый детектор формирует sin- и cos-составляющие сигнала путем выборки обсчетов из про межуточной частоты со сдвигом на одну четверть периода (Δφ = π/2). Такой фазовый детектор обеспечивает высокий динамический диапазон сигналов и не требует подбора элементов и калибровки. Он может использоваться также и в других режимах работы БРЛС при низкой промежуточной частоте.
Частотная характеристика фильтра УПЧ обеспечивает оптимальную час тотную селекцию по ширине спектра импульсного сигнала. В режимах НЧП используют импульсные сигналы с внутриимпульсной модуляцией (обычно линейной частотной). Для сжатия импульсов применяют аналоговое устройст во - ультразвуковую линию задержки на промежуточной частоте.
Также возможно выполнение операции сжатия импульсов процессором в цифровом виде после АЦП.
Для режекции узкополосных помех реализуются соответствующие прова лы в частотной характеристике УПЧ. Для режекции помеховых сигналов фона, принимаемых по основному лепестку ДНА, используют гребенчатый фильтр пачки когерентных сигналов на основе кварцевых резонаторов с высокой кру тизной и большой степенью подавления 30.. .40 дБ.
Дополнительное подавление фона (до 70 дБ в полосе 2 кГц) выполняется цифровой системой обработки. Разработка процессоров и АЦП с большой раз рядностью (15 бит) позволяет весь процесс подавления фона выполнять в циф ровом виде.
Основным требованием к амплитудной характеристике УПЧ является вы сокая линейность при высоком динамическом диапазоне, особенно в режиме ВЧП. Обычным требованием к УПЧ является наличие ДД в 80 дБ.
В режиме НЧП без когерентной обработки пачки импульсов для снижения
ДДчасто используют УПЧ с логарифмической амплитудной характеристикой. Стробирование отдельных импульсных сигналов по задержке и доплеров-
ская фильтрация пачки когерентных сигналов по частоте обычно выполняются после АЦП процессором обработки сигналов.
Изменение усиления приемника (АРУ) для сохранения постоянства отно шения сигнал/шум (динамического диапазона) осуществляется аттенюатором скачкообразно на входе МШУ обычно через 10 дБ. В режиме НЧП аттенюатор управляет коэффициентом усиления с вариациями изменением задержки цели (ВАРУ) при изменении дальности.
Второй аттенюатор в УПЧ скачкообразно изменяет усиление на 1 дБ с це лью поддержания постоянства уровня шума перед АЦП для обеспечения мак симального динамического диапазона цифровых сигналов. Обычно уровень шума квантуется на 1-2 бита.
Важным требованием к приемному устройству является стабильность ам плитудно-фазовой характеристики при изменении коэффициента усиления, уровня сигнала и помехи, напряжения питания, температуры, вибраций и др. Обычное требование к СКО фазы - единицы градусов.
На выходе приемника АЦП преобразует аналоговые сигналы (sin- и cosсоставляющие отдельно) в цифровую форму. Параметры цифровых сигналов должны быть согласованы с процессором сигналов.
Минимальная величина быстродействия АЦП определяется полосой частот сигнала Afc и обычно равна 1,5...5,0 Afc. Так, при полосе сигнала Afc= 1 МГц минимальное быстродействие АЦП £Ацп = 1,5 МГц. При использовании цифро вого фазового детектора f^n = 4 fnp., где fnp - промежуточная частота.
Разрядность АЦП определяется динамическим диапазоном входного сиг нала, который равен отношению мощности фона, принимаемого по основному лепестку ДН, к мощности шума приемника (80 дБ). Один разряд (бит) АЦП равен 6 дБ. При выборе порогового сигнала шума, равного одному разряду, и
одного разряда на знак цифрового сигнала ДД равен 6(ТЧ-2)дБ, где N - число разрядов АЦП.
Так, при N = 15 динамический диапазон составляет 78 дБ.
Если в УПЧ используется гребенчатый фильтр для подавления сигнала фона входной динамический диапазон уменьшается и требования к разрядно сти АЦП снижаются до уровня 11-12 бит.
Потери энергии сигнала в приемном устройстве определяются волноводными соединениями, системой защиты и регулировки усиления (0,8 дБ), стробированием импульсного сигнала по задержке (0,2 дБ); фазовым детектором (0,7 дБ), фильтром сжатия импульса (0,7 дБ); цифровым процессором (ЦП) (0,6 дБ) - итого потери энергии сигнала составляют 3 дБ (цифры, близкие к максимальным значениям).
2.8. Алгоритмы обработки сигналов
2.8.1. Обнаружение низколетящих целей
Наиболее сложной задачей, решаемой БРЛС, является наблюдение мало заметных низколетящих целей на фоне отражений от земной поверхности. Так, в одном разрешаемом элементе дальности 100... 150м при ширине ДНА 1° и дальности наблюдения цели 300 км мощность фона будет превышать мощность сигнала цели (ац< 1 м ) на 30...40 дБ в зависимости от типа местности. Для обеспечения обнаружения цели, необходимое отношение сигнал/фон равно 10... 13 дБ, что требует подавления фона при обработке сигнала на 40.. .50 дБ.
Так как сигналы фона и цели различаются радиальной скоростью движе ния относительно БРЛС, такая задача решается путем использования когерент но-импульсного режима с высокой частотой повторения импульсов и доплеровской фильтрацией пачки когерентных отраженных от фона и цели сигналов.
Отраженные сигналы в когерентно-импульсном режиме БРЛС имеют пе риодическую структуру как по дальности, так и по доплеровской частоте.
Сигналы по дальности (задержке) повторяются с периодом  и
и
при частоте повторений Fn = 25 кГц, Дп = 6 км. При дальности 300 км число
элементов разрешения фона по задержке, которые будут суммироваться с фо ном в элементе разрешения цели Mr = 50, что еще больше увеличивает мощ ность фона по сравнению с мощностью сигнала цели.
Структура спектра отраженных сигналов имеет сложный характер, ме няющийся в зависимости от положения ДН антенны при сканировании и пара метров движения цели относительно РЛС и земной поверхности.

На рис. 2.13 показана центральная часть (три периода повторения) спек тра. Период повторения спектра равен частоте повторения импульсов Fn.
Рис. 2.13
Число составляющих доплеровского спектра определяется шириной спек тра зондирующего сигнала  . При
. При  МГц и Fn = 25 кГц получаем Mf =40. Максимальная ширина спектра фона определяется скоро
МГц и Fn = 25 кГц получаем Mf =40. Максимальная ширина спектра фона определяется скоро
стью V c носителя |
а несущей частоте |
|
в* |
f0 и частотах fo ±Fn наблюдается увеличение мощности спектра фона («альти метр»), обусловленное отражениями от земной поверхности, находящейся не посредственно под носителем РЛС и при вертикальном зондировании имею щей максимальную удельную ЭПР, При расположении антенны БРЛС на пи лонах над фюзеляжем самолета уровень мощности альтиметрового фона уменьшается вследствие экранирования излучения и приема ЭМВ конструкци ей самолета. Однако полностью подавить альтиметровый фон таким путем не удается. При отсутствии вертикальной составляющей скорости носителя мак симум спектра фона имеет нулевой доплеровский сдвиг частоты.
На доплеровской частоте f$ расположен спектр сигнала фона, принимае мого по основному лучу ДНА. При горизонтальном полете частота ίφ опреде ляется углом сканирования ДН антенны θ относительно вектора путевой ско рости:
Уровень мощности спектра фона на других частотах определяется в ос новном уровнем боковых лепестков ДН антенны.
Форма спектра и его мощность практически не зависят от дальности на блюдения цели, так как он является спектром суммы Мг разрешаемых элемен тов фона обзора.
Доплеровская частота сигнала цели определяется относительной скоро стью сближения (удаления) Усбл цели и РЛС:

где Vr - радиальная составляющая скорости носителя БРЛС в направлении це ли; Ущ - радиальная составляющая скорости цели в направлении РЛС.
Так как цель находится в основном лепестке ДНА, радиальная скорость РЛС относительно цели известна. При горизонтальном полете и большой даль ности цели где θ - азимутальный угол ДНА относительно векто ра путевой скорости. При неизвестном угле сноса радиальную скорость носи теля можно определить непосредственно измеряя доплеровскую частоту фона,
принимаемого основным лепестком ДН антенны:  . Этот метод
. Этот метод
используют для смещения частоты спектра при любом положении ДН в про цессе сканирования по азимуту.
На рис. 2.14 показано изменение положения всего спектра помех по часто те при сканировании ДНА по азимуту и смещении спектра фона основного лу ча ДНА на нулевую частоту. Сигналы сближающихся с БРЛС целей в передней зоне обзора (Θ = ±30°) наблюдаются в свободной от помех зоне 1. В свободной задней зоне обзора 2 (Θ = 180°±30°) будут находиться сигналы удаляющихся целей. При боковом обзоре (Θ = 90°±30°) все малоскоростные цели будут на ходиться в зоне помех, а скоростные цели - в свободной зоне 3.
Рис. 2.14
Оптимальная обработка сигналов, наблюдаемых на фоне помех с нерав номерной спектральной плотностью, обычно выполняется в два этапа. На пер вом этапе режектируются выбросы спектра помех (альтиметровый фон и фон, принимаемый по главному лепестку ДНА). В результате спектральная плот ность помехи в области доплеровского спектра сигнала становится равномер ной, т. е. белым шумом («выбеливание» помехи). Второй этап сводится к со гласованной обработке сигналов цели, прошедших «выбеливающий» фильтр.
Согласованная обработка сигналов выполняется раздельно для импульс ного сигнала внутри периода повторения импульсов и для когерентной пачки импульсных сигналов (межпериодная обработка).
Согласованная обработка сигналов по задержке (внутрипериодная обра ботка) осуществляется фильтром УПЧ, форма частотной характеристики кото рого согласована со спектром импульсного сигнала точечной цели.
Согласованная обработка пачки импульсов в каждом элементе разрешения по задержке (стробе дальности) сводится к обычной узкополосной доплеровской фильтрации (когерентному накоплению) гармонического сигнала цели и выполняется цифровым процессором при помощи алгоритма быстрого преоб разования Фурье (БПФ).
Сигналы каждого канала по задержке и частоте поступают на порог обнару жения, определяемый уровнем фона и помехи в каждом доплеровском фильтре.
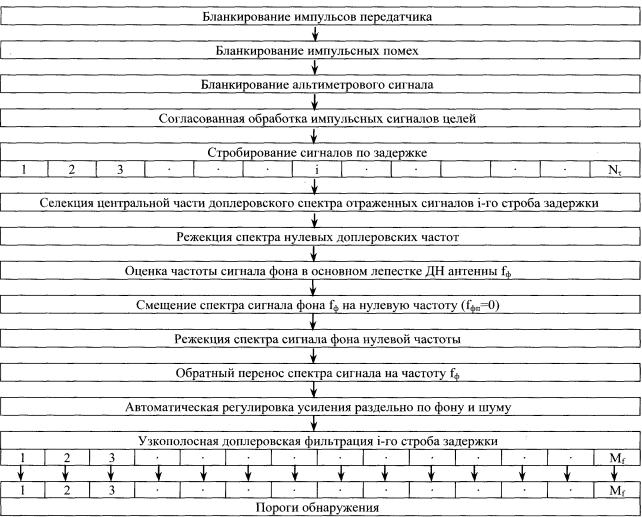
Алгоритм обнаружения сигналов низколетящих воздушных целей на фоне отражений от подстилающей поверхности представлен на рис. 2.15.
Рис. 2.15
Для устранения перегрузки приемника в момент излучения передатчика в системе защиты приемника проводится бланкирование импульсов передатчика на время 3—4 мкс. Кроме того, система защиты бланкирует импульсные помехи от внешних источников излучения.
В момент прихода мощного отраженного сигнала от местности непосред ственно под носителем БРЛС (альтиметровый сигнал) приемник запирается на время прихода отраженных сигналов в полосе дальности (400...500) м. Иногда путем выбора частоты повторения зондирующих сигналов и высоты полета но сителя БРЛС совмещают времена бланкирования импульсов передатчика и альтиметра, что уменьшает «мертвую» зону приема сигналов.
Согласованная обработка импульсных сигналов цели проводится путем выбора частотной характеристики УПЧ. Для уменьшения вероятности появле ния дополнительных (ложных) отметок цели в соседних элементах разрешения по дальности (задержке) амплитудно-частотная характеристика УПЧ взвеши вается специальной функцией (например, Хэмминга) для уменьшения уровня боковых лепестков выходного сигнала точечной цели.
В пределах периода повторения сигналов на входе УПЧ проводится стробирование сигналов по задержке. Длительность каждого строба Δτ определяет ся разрешающей способностью БРЛС по задержке δτ (дальности). Для умень шения потерь энергии сигнала при стробировании вследствие несовпадения максимума сигнала цели с центром строба увеличивают число стробов (выбо
рок) на элемент разрешения: Ъх = (1,0...2,0)Δτ. |
При частоте повторения |
|
Fn = 25 кГц и разрешении по задержке 5t = |
1 мкс число каналов по дальности |
|
(число обрабатываемых выборок сигналов) |
|
Чем |
больше число каналов, тем меньше потери сигнала, но тем сложнее система обработки. Импульсные сигналы с каждого строба дальности поступают в свой канал межпериодной обработки (доплеровской фильтрации пачки импульсных сигналов).
Так как доплеровский спектр сигналов цели и помех имеет периодический характер (см. рис. 2.13) для уменьшения динамического диапазона на 20...30 дБ используют только центральную часть спектра, выделяемую при помощи од нополосного (обычно кварцевого) фильтра. Иногда для снижения динамиче ского диапазона доплеровский спектр разделяется двумя фильтрами на две час ти (левую и правую) относительно несущей (промежуточной) частоты с после дующей раздельной обработкой каждой части спектра.
Сигналы альтиметра и малоскоростных целей, в том числе наземных, а также проникающие сигналы излучения передатчика имеют нулевые доплеровские частоты. Режекторный фильтр подавляет сигналы нулевых частот в полосе 1,5...2,0 кГц.
Алгоритмы оценки частоты сигнала фона, принимаемого по основному лепестку ДНА, а также алгоритмы смещения спектра всех сигналов на величи ну этой частоты, обеспечивают возможность:
эффективной режекции (подавления) помех, принимаемых по основному лучу ДН антенны низкочастотным фильтром, на 40.. .50 дБ;
получения максимальной зоны по частоте (скорости сближения целей), свободной от помех в передней зоне обзора (см. рис. 2.14);
получения максимальной зоны по частоте (скорости удаления целей), сво бодной от помех в задней зоне обзора.
В случае необходимости обнаружения с одинаковой эффективностью всех целей (сближающихся и удаляющихся) в круговой зоне обзора после подавления фона основного луча ДН антенны спектр всех сигналов смещается в первона чальное состояние, когда центральная частота спектра фона равна нулю.
Несмотря на режекцию выбросов спектра фона на нулевой частоте (альтометр) и частоте фона главного луча ДН антенны, спектральная плотность фона, принимаемого по боковым лепесткам ДН антенны, значительно пре вышает спектральную плотность помех в зоне, свободной от фона. Для вы равнивания уровней сигналов фона и помех перед узкополосной доплеровской фильтрацией используют две раздельные системы АРУ - по фону и по помехам.
Узкополосная доплеровская фильтрация сигналов в каждом стробе даль ности обеспечивает согласованную обработку сигналов как в зоне спектра фо на, так и в свободной зоне (зоне помех).
Пороги обнаружения выставляются для обеспечения заданного уровня ве роятности ложных тревог. Номер строба дальности и номер фильтра доплеровской частоты (скорости), в которых сигнал превысил порог, являются исход ными данными для оценки координат целей и завязки траекторий целей.
Следует отметить, что операции режекции фона и узкополосной фильтра ции могут быть объединены и выполнены путем отключения фильтров с номе рами, соответствующими зоне режекции.
При достаточно большой радиальной скорости низколетящей воздушной цели спектр сигнала цели находится вне спектра фона. Вероятность обнаруже ния такой цели определяется отношением сигнал/помеха, где помеха формиру ется в основном внутренним шумом приемника и активными источниками по мех. Помехи фона в этой области спектра обусловлены флуктуациями частоты зондирующего сигнала, которые формируют боковые лепестки спектра сигнала фона. Обычно для уменьшения уровня фона используется весовая обработка пачки импульсных сигналов, обеспечивающая подавление фона до уровня ни же собственных шумов приемника.
Отношение сигнал/шум в элементе разрешения по задержке и частоте оп ределяется выражением

где Рср - средняя мощность излучения БРЛС; Тс - время когерентного накопле ния пачки импульсов (доплеровская фильтрация); G - коэффициент усиления антенны, одинаковый на передачу и прием; λ - длина волны БРЛС; Νπ - спек тральная плотность мощности помех; ап - суммарный коэффициент потерь
энергии сигнала; Д - дальность цели.
Средняя мощность существующих БРЛС АКРЛДН порядка 10...15 кВт. Время накопления обычно 2.. .3 мс.
Время облучения цели
где Θ0 - ширина ДН по азимуту (1°), Qc - угловая скорость вращения антенны (360° за 10 с), Тобл^ЗО мс. Через каждые 10 мс изменяется частота повторения. За время 10 мс проводятся четыре обработки на одной частоте повторения и обнаружение ведется по алгоритму «три из четырех».
Коэффициент усиления антенны при ширине ДН Θ0 =1°Η Φ0=5° порядка 7. ..8103. ЭПР цели (истребитель) - 3.. .5 м2.
Спектральная плотность шумов определяется коэффициентом шума МШУ и устройств защиты приемника: Кш=4.. .6 дБ и N0 = kTFm = 4-10 -¥ш [Вт/Гц]. В
случае активной шумовой помехи Nn = NG + ΝΑπ, где ΝΑπ - спектральная плот ность активной помехи.
Суммарные потери (средние оценочные значения [8]) состоят из следую щих составляющих:
в обтекателе |
(0,8... 1,2) дБ; |
в волноводах передатчика |
(1,0... 1,2) дБ; |
в волноводах приемника |
(1,2... 1,6) дБ; |
за счет ДНА при обработке |
(1,3... 1,5) дБ; |
при стробировании по задержке |
(0,2.. .0,3) дБ; |
при режектировании фона |
(0,5.. .0,9) дБ; |
за счет рассогласования характеристики УПЧ |
(0,2.. .0,3) дБ; |
при стробировании по частоте и весовой обработке |
(1,5...1,9) дБ; |
при пороговой обработке |
(0,5.. .0,7) дБ; |
потерь в дожде |
6 дБ |
Суммарные потери (без дождя) - 8... 14 дБ.
Требуемое отношение сигнал/помеха при Ρ^= 10-6 в случае медленно флук туирующей пачки импульсов для получения вероятности обнаружения Рпо = 0,7 равно 10 дБ, а для вероятности 0,9 необходимо иметь 15 дБ (рис. 2.16, а).
Плотность распределения ЭПР цели экспоненциальная.