

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfбыть применен универсальный для любого типа многопозиционных радиоло кационных систем метод, изложенный в работе [1].
Врезультате использования указанного метода радиолокации становится неэффективной постановка имитирующих помех и при распознавании такой ситуации постановщик помех будет вынужден перейти к постановке менее эф фективных шумовых маскирующих помех, что существенно повысит энерге тический выигрыш для БРЛС АК РЛДН.
Витоге рассмотренные пути повышения помехозащищенности БРЛС АКРЛДН представлены на рис. 4.22, 4.23. При этом мероприятия по обеспече нию скрытости должны базироваться на использовании частотного, структур ного, временного, амплитудного и пространственного способов скрытия излу чений, по помехоустойчивости - на наращивании энергетики, использовании предпочтительных с точки зрения помехозащищенности зондирующих сигна лов, совершенствовании межпериодной и межобзорной обработки, конфликт но-устойчивого управления режимами излучения и обработки.
ЗАДАЧИ |
МЕРОПРИЯТИЯ |
ВОЗМОЖНЫЙ ЭФФЕКТ |
|
|
|
|
|
|
Реализация адаптивной |
На 20.. .30 % увеличить |
|
|
перестройки частоты |
дальность обнаружения |
|
|
Применение автокомпенсаторов помех |
На 10.. .25 дБ уменьшить уровень |
|
Совершенствование |
бокового приема помех |
||
защиты от активных |
|
от одиночных ПАП |
|
шумовых помех (АШП) |
Внедрение активной маскировки |
На 3... 10 дБ уменьшить уровень |
|
|
излучения |
воздействующей АШП |
|
|
Реализация управляемых |
Повышение скрытости работы |
|
|
(от РТР или ВО) режимов мерцания |
||
|
|
||
|
Внедрение активной маскировки |
Снижение потока ОИП |
|
|
излучения |
(в несколько раз) |
|
|
|
|
|
Реализация защиты |
Реализация СПБП |
Исключение приема ОИП |
|
от когерентных ответно- |
по боковым лепесткам |
||
|
|||
импульсных помех |
Совершенствование межпериодной |
Снижение числа ложных трасс |
|
(ОИП) |
и межобзорной обработки |
||
|
|
|
|
|
Исключение регулярности |
Дезорганизация систем РЭБ |
|
|
сканирования |
противника |
|
|
|
В 2-3 раза улучшаются |
|
|
Реализация сверхразрешения |
разрешающие способности |
|
|
|
пеленгационного канала (ПК) |
|
|
Внедрение вторичной обработки |
В 1,3-2 раза увеличивается |
|
Совершенствование |
пеленговой информации |
точность пеленгации ПАП |
|
пассивных каналов |
|
Точность определения ПАП: |
|
разведки |
Использование самотриангуляции |
10...20 км по R, 10...30° по β, |
|
|
|
5-30° по ε |
|
|
Реализация корреляционной |
Точность определения координат |
|
|
ПАП |
||
|
системы обработки |
||
|
30... 100 км (по дальности) |
||
|
|
||
|
|
|
Рис. 4.22
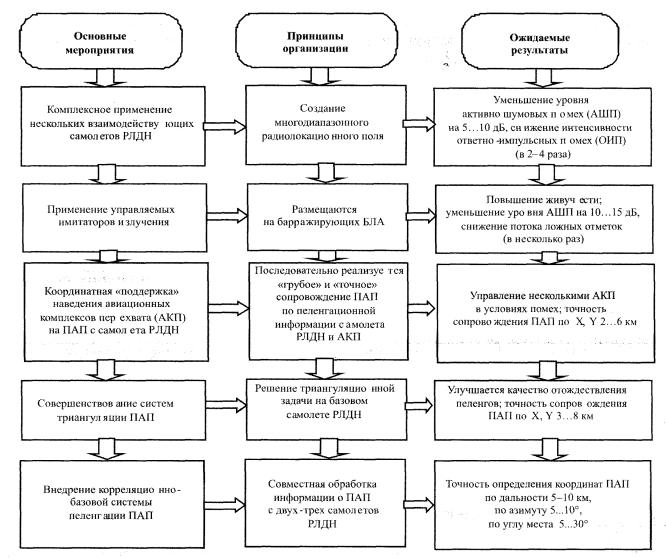
Рис. 4.23
Для повышения скрытости и помехозащищенности целесообразна актив ная маскировка излучения ложными сигналами (ЛС). Одним из возможных пу тей реализации этого подхода является включение в состав БРЛС комплекса РЛДН станций помех или дополнительных передатчиков (ДП).
При реализации данного подхода даже при известном диапазоне пере стройки БРЛС противник будет вынужден проводить подавление комплекса по боковым лепесткам заградительной (скользящей) помехой с шириной спектра не менее 200...500МГц. С точки зрения улучшения помехозащищенности от многократных ответно-импульсных помех использование ЛС позволяет сни зить в несколько раз поток ложных отметок. При этом в состав БРЛС необхо димо включить компенсационную антенну и ДП с возможностью быстрой пе рестройки частоты.
Системным методом повышения помехозащищенности (ПЗ) на основе ЛС является одновременное использование с АК РЛДН управляемых (неуправляе-
мых) имитаторов излучения авиационных комплексов (УИИ АК, НИИ АК), создающих ложное поле излучения и дезорганизующих системы РЭП вероят ного противника по частотам и числу работающих АК. При этом за счет лож ного увеличения числа пространственно разнесенных излучателей повышается также живучесть реальных комплексов. Для увеличения ЭПР носителей У(Н) ИИАК до ЭПР выбранного носителя можно использовать линзы Люнеберга.
Внедрение управляемых режимов мерцания (УРМ) должно базироваться на применении данных анализатора помеховой обстановки (ΑΠΟ), исполь зующих информацию ПК (РТР) комплекса РЛДН и обеспечивающих адаптив ное включение (выключение) излучения БРЛС в зависимости от складываю щейся воздушной и помеховой обстановки. Дополнительным источником ин формации для определения стратегии управления мерцанием может служить информация БВС по результатам вторичной обработки (ВО), позволяющая рассчитать переменные периоды включения (выключения) излучения в зави симости от решаемых задач АК и качества сопровождения приоритетных и не приоритетных целей в отдельных секторах.
Схемными методами снижения уровня бокового приема в направлении на ПАП могут быть разработка и внедрение в БРЛС АК РЛДН специальных авто компенсаторов помех, учитывающих квазинепрерывный режим работы с коге рентным накопителем отраженных от целей сигналов на фоне мощных отража телей от подстилающей поверхности.
Реальным и практически реализуемым способом улучшения индивидуаль ной ПЗ является перестройка несущей частоты (ПНЧ), осуществляемая слу чайным образом в пределах возможной полосы работы (без учета спектра воз действующей помехи). При этом ПНЧ в режиме КНИ возможна от пачки к пачке, в режиме НЧ - от импульса к импульсу. Адаптивная (по данным анали затора спектра) перестройка позволяет увеличить дальность обнаружения при крытых помехами целей не менее чем на 20.. .30%.
Внедрение в АК РЛДН ФАР с электронным сканированием в азимуталь ной плоскости появляется возможность защиты от ответно-импульсных помех за счет псевдослучайного выставления обзорного луча, исключения регулярно сти в сканировании и дезорганизации тем самым средств РЭБ противника.
Таким образом, заданный уровень помехозащищенности может быть достигнут за счет внедрения в комплексе специальных технических мер инди видуального и системного характера. Реализация принципов конфликтноустойчивого управления процессами обработки информации в БРЛС позволит повысить его разведывательно-информационные возможности при обнаруже нии и сопровождении воздушных целей, обеспечить адаптацию системы к из менению решаемых задач разведки и параметрам целевой и помеховой обста новки.
Литература
1.Астапенко Ю.А., Вакуленко А.А., Диев Ю.А., Силкин А.Т. Оптимизация рабочей зоны много позиционной радиолокационной системы при ограничениях по дальности видимости. - Ра диотехника, 2000, № 1 1 .
2.Белов С.Г., Коданев В.Л. Оптимальная фильтрация текущих координат подвижных радио электронных средств. Цифровая обработка сигналов: Научно-методические материалы / Под ред. Е.Ф. Толстова. - М.: ВВИА им. проф. Н.Е. Жуковского, 1995.
3.Браммер К, Зиффлинг Г. Фильтр Калмана - Бьюси / Пер. с нем. - М.: Наука, 1982.
4.Вайпан С.Н., Вакуленко А.А., Король О.В., Яголъников, СВ. Метод формирования эффектив ного множества режимов работы для конфликтно-устойчивого многофункционального ра диотехнического комплекса. - Радиотехника, 1997, № 5.
5.Вайпан С.Н., Вакуленко А.А., Кузьмин Г.В., Яголъников СВ. Метод конфликтно-устойчивого выбора режима функционирования радиотехнического комплекса в изменяющихся условиях. - Радиотехника, 1996, № 1 1 .
6.Вайпан С.Н., Вакуленко А.А., Кузьмин Г.В., Яголъников СВ. Метод обработки пеленговой ин формации в подвижных радиотехнических комплексах для оценки параметров траекторий излучающих объектов. - Радиотехника, 1996, №11 .
7.Вайпан С.Н., Вакуленко А.А., Рюмшин А.Р. И др. Выбор показателя эффективности для синте за многофункциональных систем. - Радиотехника, 1997, №11 .
8.Вайпан С.Н., Вакуленко А.А., Яголъников СВ. Метод обоснования стратегии управления ра диоэлектронной системы в динамике конфликта. - Радиотехника, 2004, № 5.
9.Верба B.C., Вакуленко А.А., Дод В.Н. Методика выбора в реальном масштабе времени эффек тивного варианта цифровой обработки радиолокационной информации в многофункцио нальном радиотехническом комплексе с трассовым выходом. - Радиотехника, 2005, № 5.
10.Верба B.C., Вакуленко Α.Α., Дод В.Н. Организация конфликтно-устойчивого управления ин тегрированной радиоэлектронной системой в динамике конфликта со средствами радиоэлек тронного подавления. - Радиотехника, 2006, № 1.
11.Верба B.C., Вакуленко А.А., Дод В.Н. Принципы управления многофункциональными интег рированными радиоэлектронными системами в динамике конфликта со средствами радио электронного подавления. - Радиотехника, 2005, № 5.
12.Владимиров В.И., Лихачев В.П., Шляхин В.М. Антагонистический конфликт радиоэлектрон ных систем. Методы и математические модели / Под ред. В.М. Шляхина. - М.: Радиотехника, 2004.
13.Голъденберг Л.М., Матюшкин БД., Поляк М.Н. Цифровая обработка сигналов: Справочник. - М.: Радиосвязь, 1985.
14.Защита от радиопомех / Под ред. М.В. Максимова. - М.: Сов. радио, 1976.
15.Защита радиолокационных систем от помех. Состояние и тенденции развития / Под ред.
А.И. Канащенкова и М.И. Меркулова. - М.: Радиотехника, 2003.
16.Зингер Р.А. Оценка характеристик оптимального фильтра для слежения за пилотируемой це лью. - Зарубежная радиоэлектроника, 1971, № 8.
17.Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. — М.: Радио и связь, 1986.
18.Радиоэлектронные системы: Основы построения и теория. Справочник /Под ред. ЯД. Ширмана. - Изд. 2-е, перераб. и доп. - М.: Радиотехника, 2007.
19.Этингтон Д.Α., Карилас П.Дж., Райт Дж.Д. Многофункциональные вращающиеся РЛС с электронным сканированием для обзора воздушного пространства. - ТИИЭР, 1985, Т. 73, № 2.
ГЛАВА 5
ОСОБЕННОСТИ ПОСТРОЕНИЯ И ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ НАВЕДЕНИЯ ИСТРЕБИТЕЛЕЙ НА ВОЗДУШНЫЕ ЦЕЛИ
5.1. Особенности построения и режимы работы системы наведения истребителей на воздушные цели
Система наведения истребителей с АК РЛДН представляет собой одну из наиболее сложных разновидностей систем командного радиоуправления
(СКРУ) [13] - совокупности функционально связанных подсистем (устройств), предназначенных для наведения ЛА по командам, формируемым на пункте управления и передаваемым на борт управляемого объекта при помощи радио линии [12].
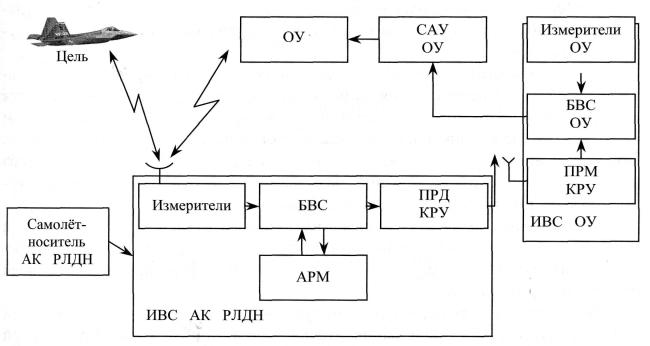
Состав и функциональные связи СКРУ на базе АК РЛДН иллюстрирует рис. 5.1.
Рис. 5.1
Информационно-вычислительная система (ИВС) АКРЛДН содержит из мерители различной физической природы (см. рис. 1.6), бортовую вычисли тельную систему (БВС), передающую часть командной радиолинии управле ния (ПРД КРУ) и автоматизированное рабочее место штурмана наведения. На водимый истребитель включает летательный аппарат как объект управления (ОУ), его систему автоматического управления (САУ) и ИВС в составе борто вых измерителей, БВС и приемной части КРУ (ПРМ КРУ).
На основе информации, извлекаемой измерителями из сигналов, посту пающих от цели и наводимого истребителя, на индикаторе АРМ отображает ся воздушная обстановка. По результатам оценки этой обстановки штурма ном наведения совместно с БВС решаются задачи целераспределения, выбора методов наведения ОУ на цель и определяется состав управляющих и инфор мационных сообщений, передаваемых при помощи КРУ на наводимые ЛА. Эти сообщения принимаются приемной частью КРУ наводимого истребителя, дешифрируются и с учетом информации от собственных измерителей преоб разуются в команды наведения либо используются экипажем для информации о воздушной обстановке. В свою очередь команды наведения поступают в САУ для управления истребителем в соответствии с командами, поступаю щими от АК РЛДН.
В общем случае в АК РЛДН используются режимы командного наведения (КН), командного наведения с координатной поддержкой и полу автономных действий (ПАД).
При командном наведении управление истребителем осуществляется вы дачей на его борт команд наведения и целеуказания, сформированных на пунк те управления (наведения), при наличии на нем регулярной информации о це лях и истребителе.
При командном наведении с координатной поддержкой наряду с коман дами наведения и целеуказания на борт истребителя периодически передается информация о цели, что позволяет в любой момент перейти к таким способам выхода в боевое соприкосновение, как бортовое наведение и бортовой поиск. Последние иногда рассматриваются как разновидности обобщенного способа выхода в боевое соприкосновение, называемого бортовым управлением и ис пользуемого при полу автономных действиях истребителей.
Под полуавтономными действиями понимаются действия одиночных и групп истребителей в АСУ, при которых задачи поиска, наведения и атаки ре шаются их бортовыми средствами управления по информации, поступающей от внешних источников.
Возможность осуществления полуавтономных действий истребителей обеспечивается их бортовой вычислительной системой, которая по регулярной и прерывистой информации о координатах и параметрах движения цели (груп пы целей), передаваемой по КРУ с АК РЛДН, может самостоятельно решать
задачу управления самолетом для вывода в район обнаружения и атаки воз душного противника.
Следует иметь в виду, что при бортовом управлении (бортовое наведение, бортовой поиск) команды наведения для истребителя на ПН не формируются.
Бортовое наведение применяется при большой загрузке штурмана АК РЛДН в процессе отражения масси
рованного налета средств воздушного нападения; при сбоях команд наведения и неустойчивом решении задачи наведения,
что определяется по отклонению фактических параметров полета истребителя от заданных и нестабильности расчетного рубежа перехвата по дальности и на правлению;
при наличии на АК РЛДН регулярной координатной информации о цели и отсутствии такой о истребителе, с которым поддерживается связь;
при необходимости дублирования этапа самонаведения истребителя в случае подавления помехами его БРЛС либо выхода последней из строя.
При бортовом наведении информация координатной поддержки выдается пунктом наведения с темпом, позволяющим истребителю устойчиво выходить в область атак цели. Бортовое наведение, как правило, используется для дейст вий ударных групп.
Бортовой поиск используется при наличии на АК РЛДН либо разовой пре рывистой либо априорной информации о цели, по которой нельзя реализовать командное и бортовое наведение. Кроме того, в случае длительного прекраще ния поступления на борт информации при командном и бортовом наведении ис требитель автоматически переключается на бортовой поиск, используя принятые ранее и запомненные координаты. При этом аппаратура истребителя осуществ ляет экстраполяцию положения цели на текущий момент времени по последним данным координатной поддержки. В случае возобновления передачи на борт ис требителя соответствующей информации имеется возможность «вернуться» к управлению по командам или по информации, передаваемой через КРУ.
Бортовой поиск характерен для действий поисковых групп и реализуется в результате совместного поиска цели бортовыми РЛС группы в боевом порядке, обеспечивающем наибольшую зону просматриваемого пространства и необхо димое взаимное перекрытие зон обзора РЛС. Обнаружив цель, ведущий группы организует боевые действия группы по ее уничтожению.
Групповые действия - действия, направленные на решение какой-либо общей боевой задачи группой из нескольких истребителей. Групповые дейст вия обеспечивает находящаяся на борту аппаратура автоматизированного об мена информацией между самолетами группы и ее отображения на специаль ных индикаторах. Это позволяет использовать в АК РЛДН один канал наведе ния для управления группой, передавая команды и информацию о координатах цели и тактической обстановке на борт ведущего группы. В свою очередь
ведущий самостоятельно управляет своей группой, осуществляя координацию действий всех ее экипажей.
Группа истребителей может вести боевые действия одним из трех спо собов:
при командном управлении АК РЛДН; полу автономно; автономно.
Командное управление предполагает движение ведущего истребителя группы в соответствии с передаваемыми ему командами. Остальные истреби тели группы, получая и выполняя те же команды или выполняя команды веду щего, выдерживают определенный боевой порядок.
Полуавтономные действия состоят в том, что непосредственные команды управления движением истребителей формируются ведущим группы на осно вании информации, передаваемой с АК РЛДН.
Автономные действия группы осуществляются без какого-либо участия пункта наведения, а только по командам ведущего.
Боевая работа АКРЛДН начинается с момента загрузки на аэродроме в базу данных полетного задания и карты местности (карты ТВД). В полетном задании содержатся маршрут полета АК РЛДН и вся оперативно-тактическая обстановка в зоне его действия. Оперативно-тактическая информация поступа ет на АРМ командира расчета, который при помощи БВС осуществляет непре рывный мониторинг обстановки и управляет действиями АК РЛДН. Оператив но-тактическая обстановка непрерывно обновляется в базе данных БВС на ос нове информации от внешних и внутренних датчиков. При выводе из строя какого-либо датчика (внешнего или внутреннего) АК РЛДН продолжает вы полнение боевой задачи при некотором снижении эффективности.
Ниже более подробно будут рассмотрены методы наведения, используемые в АК РЛДН для управления истребителями, особенности функционирования систе мы наведения в различных режимах и принципы построения и особенности функ ционирования командных радиолиний управления.
5.2. Методы наведения самолетов на воздушные цели
Методы наведения самолетов с АК РЛДН на воздушные цели должны обеспечивать формирование такой требуемой траектории, наведение по кото рой обеспечивает вывод ЛА к определенному времени в зону уверенного за хвата цели хотя бы одной из визирных систем (БРЛС, ОЭС, оптическим прице лом и т. д.) [1].
В связи с тем, что на этапе дальнего наведения самолет управляется по курсу, высоте и скорости [6], различают и соответствующие методы наведения.
Методы наведения по высоте определяют формирование требуемых зна чений высоты Нт для любого момента времени, обеспечивающих желаемый профиль полета в вертикальной плоскости.
Методы наведения по курсу предопределяют формирование требуемых значений ψτ курса, обусловливающих желаемую траекторию наведения в гори зонтальной плоскости.
Методы наведения по скорости обусловливают вычисление требуемых значений VT скорости, гарантирующих выход истребителя в район цели к за данному времени. При этом параметры рассогласования, определяющие алго ритмы траекторного управления самолетом в режиме ручного управления, фор мируются по правилам:
(5.1)
(5.2)
в которых ψ, Η и V - текущие значения курса, высоты и скорости.
5.2.1. Особенности дальнего наведения истребителей
Реализация этапа дальнего наведения с АК РЛДН при командном наведе нии одиночных истребителей на воздушные цели предусматривает формирова ние для каждого самолета проекции пространственной траектории в горизон тальной плоскости и профиля полета - проекции пространственной траектории
ввертикальной плоскости. При этом возникает ряд особенностей.
Вчастности, в процессе решения штурманской задачи [11], по результатам которой определяются время перехвата и положение рубежа перехвата, на АК РЛДН необходимо выбрать метод наведения, полусферу атаки (для метода маневра), номер N программной скорости VN, номер η вида программы полета на перехват или момент включения форсажа. При выборе этих параметров пе рехвата руководствуются следующими соображениями.
Вкачестве наиболее простого и надежного метода наведения в горизон тальной плоскости целесообразно использовать метод перехвата. Его приме нение при наведении целесообразно во всех случаях, когда нет жестких огра ничений на ракурс атаки цели. Метод погони (прямой метод) используется при наведении в заднюю полусферу и соответствующих взаимных положениях ис требителя и цели либо в начале наведения, когда еще отсутствуют устойчивые оценки параметров движения цели. Во всех остальных случаях применяется метод маневра. При этом методе для истребителей старых типов, как правило, назначается атака из задней полусферы.
При назначении программной скорости для метода перехвата выбирается наименьшее из значений VN, удовлетворяющих неравенству  где апс - некоторая константа, близкая, но несколько большая единицы [3, 7]. При этом
где апс - некоторая константа, близкая, но несколько большая единицы [3, 7]. При этом
для высоты цели должно быть выполнено условие 
причем минимальная и максимальная для данного типа истребителя высоты перехватываемой цели зависят от программной скорости. При наведении мето дом маневра назначается минимальное значение VN, обеспечивающее возмож ность перехвата цели по скорости (с некоторым запасом) и высоте ее полета.
Для определения номера η вида программы для каждого значения N и Η < Нц часто используют заранее рассчитанные и затабулированные значения радиусов действия истребителя и соответствующие им времена полета, что позволяет найти для каждого η требуемые дальности обнаружения цели, сравнение которых с фактическим положением цели позволяет выбрать зна чения η [2, 3].
Формирование пространственной траектории самолета обеспечивается со ответствующими алгоритмами наведения. При этом алгоритм наведения в го ризонтальной плоскости решает следующие задачи [7]:
сведение временного баланса; вывод истребителя в зону возможных атак; вывод в заданную полусферу атаки;
вывод под заданным углом встречи с целью; определение длины траектории до рубежа поражения.
Алгоритм наведения в вертикальной плоскости выполняет следующие за дачи:
сведение баланса по топливу; сведение баланса по набору высоты и скорости;
оценку реализуемости траектории по топливу.
При расчете профиля полета используются характеристики полета по ба зовой программе набора высоты и скорости и характеристики схода с нее. В расчетные формулы входят путь, время и топливо, необходимые для выпол нения рассматриваемого элемента профиля, а также секундные расходы топли ва при различных режимах работы двигателей. В алгоритмах также использу ются характеристики БРЛС истребителя и характеристики ракет.
Процесс формирования траектории полета истребителя итерационный. В процессе формирования траектории алгоритмы наведения в вертикальной и горизонтальной плоскостях постоянно взаимодействуют. Алгоритм наведения в вертикальной плоскости пересылает в алгоритм наведения в горизонтальной плоскости поправку в полетное время, учитывающую отличие средней скоро сти полета истребителя от балансной скорости и значение балансной скорости. Алгоритм наведения в вертикальной плоскости получает от алгоритма наведе ния в горизонтальной плоскости длину траектории. Под балансной скоростью Уб понимается скорость на том участке профиля полета, длину которого можно изменять без изменения условий набора высоты и скорости. При разных про граммах полета и на разных этапах наведения в качестве балансной скорости