

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdf(3.52)
(3.53)
где
(3.54)
- вычисляемые по правилу (3.32), (3.33) адаптивные поправки к прогнозу (3.52), оптимальные по минимуму функционала (3.34)
(3.55)
в котором
(3.56)
В соотношениях (3.51) и (3.52) Д3 и V3 - начальные значения дальности и скорости, формируемые на этапе завязки;  - коэффици енты усиления невязок (3.53), вычисляемые в процессе решения уравнений (3.29)-(3.31); г- - коэффициенты, учитывающие вес невязок (3.53) при вычис лении поправок
- коэффици енты усиления невязок (3.53), вычисляемые в процессе решения уравнений (3.29)-(3.31); г- - коэффициенты, учитывающие вес невязок (3.53) при вычис лении поправок  по закону (3.33).
по закону (3.33).
Анализ алгоритмов фильтрации (3.51)-(3.54) позволяет прийти к следую щим заключениям.
1. Полученный алгоритм отличается от классического алгоритма калмановской фильтрации наличием аддитивных адаптивных поправок (3.54) про-
гноза, а также тем, что сам прогноз (3.52) осуществляется с малым шагом Τ , приближаясь по точности к аналоговым процедурам предсказания, в то время как невязки (3.53), коэффициенты их усиления (3.29), (3.30) и поправки (3.54) вычисляются с существенно большей дискретностью по мере получения изме рений (3.45), (3.46).
2. Поправки прогноза (3.32), (3.33), (3.54) зависят от параметров первич ных измерителей (Η ), синтезированных фильтров ( Koij) и от условий приме
нения, определяющих конкретные значения  . Это позволяет получить систему фильтрации, адаптивную к выбранным первичным измери телям, синтезированному фильтру и закону изменения отслеживаемой траекто рии. В начальные моменты времени, когда коэффициенты Кф- фильтра велики
. Это позволяет получить систему фильтрации, адаптивную к выбранным первичным измери телям, синтезированному фильтру и закону изменения отслеживаемой траекто рии. В начальные моменты времени, когда коэффициенты Кф- фильтра велики
и он динамично реагирует на первоначальные ошибки завязки траекторий  , поправки ид , uv и И:Д незначительны. В то же время
, поправки ид , uv и И:Д незначительны. В то же время
в установившемся режиме работы фильтра, когда Кф- малы и он плохо реаги рует на изменение входных сигналов (эффект старения измерений [14]), коэф фициенты ι·; передачи невязок возрастают, и прогноз (3.52) существеннее кор ректируется поправками (3.54).
3. Если реальные условия функционирования фильтра соответствуют ги потезе движения, использованной при его синтезе, то невязки малы (АД « 0 , AV « 0 ) и прогноз (3.52) практически не корректируется. Если реаль ные траектории целей соответствуют более сложным гипотезам движения, то возрастают невязки (3.53), корректирующие поправки ид , uv и и-^ (3.54), из меняются экстраполированные значения фазовых координат (3.52), а соответ ственно, и оценки (3.51).
Использование (3.50) в алгоритмах (3.29)-(3.33) дает возможность получить аналогичные алгоритмы адаптивной аналого-дискретной фильтрации для угло мерных каналов, формирующих оценки и для которых справедливы все выводы, сделанные для фильтра дальномерного канала.
В соответствии с (3.35) решение об идентификации полученных измере ний (3.45)-(3.48) принимается по минимуму функционала
(3.57)
в процессе его поочередного вычисления для всех j экстраполируемых траек торий. Та траектория, для которой функционал (3.57) будет наименьшим, и считается наиболее достоверно соответствующей данному измерению.

Весовые коэффициенты |
, определяемые важностью |
той или иной поправки для всего режима в целом, могут выбираться по раз личным правилам. Наиболее простым из них является правило равнозначности, в соответствии с которым вклад всех слагаемых в функционал (3.57) полагает ся одинаковым [10].
Достоинством рассмотренной процедуры бесстробовой идентификации по правилу (3.57) является отсутствие ограничений на разрешающую способ ность, налагаемых размерами стробов, учет предыстории движения в (3.54), (3.57), что позволяет снизить вероятность перепутывания близкорасположен ных и пересекающихся траекторий, снижение вероятности сопровождения ложных целей, поскольку здесь вероятность ложных тревог определяется размерами элементов разрешения, а не существенно большими размерами стробов отождествления. Еще одно достоинство бесстробовой идентифика ции - возможность адаптации фильтров сопровождения за счет адаптивной коррекции прогноза.
Эффективность алгоритмов автоматического сопровождения целей в ре жиме обзора с бесстробовой идентификацией и адаптивной коррекцией про гноза, определяемых соотношениями (3.51)-(3.57), иллюстрируется на примере функционирования дальномерного канала РЛС на этапах экстраполяции, иден тификации измерений и фильтрации. Эффективность алгоритмов определялась по показателям точности оценивания фазовых координат, используемых для управления самолетом-носителем, по разрешающей способности по этим коор динатам и достоверности правильной идентификации радиолокационных из мерений при сопровождении далеко и близкорасположенных неманеврирующих и маневрирующих целей, в том числе и на пересекающихся трассах.
В качестве оценки точности использовались среднеквадратические ошиб ки GR, σν оценивания дальности Д до цели и скорости сближения V с ней, рас считываемые по классической формуле
|
(3.58) |
где |
- соответственно реальное значение и оценка i-й фазовой коорди |
наты (I = Д, V) на k-м шаге; N - число однотипных реализаций.
Под разрешающей способностью понималась минимальная разность в ко ординатах, при которой с вероятностью не хуже заданной принимается реше ние о наличии двух целей.
Результаты получены путем имитационного моделирования траекторий целей (3.36)-(3.38), результатов измерений (3.45), (3.46), алгоритмов аналогодискретного оценивания и бесстробовой идентификации (3.51)-(3.57).
Точность формирования оценок дальности и скорости сближения оцени валась при следующих условиях:
объектом сопровождения является слабо маневрирующая цель; периоды обращения к целям изменяются в интервале от Τι=0,4 до Т2=3,2 с; диапазон изменения дальностей  км; время накопления меняется от 10 до 20 мс; используются измерители с ошибками ади, Оуи,
км; время накопления меняется от 10 до 20 мс; используются измерители с ошибками ади, Оуи,
имеют место начальные ошибки завязки траектории по дальности АД0 и по скорости AVo.
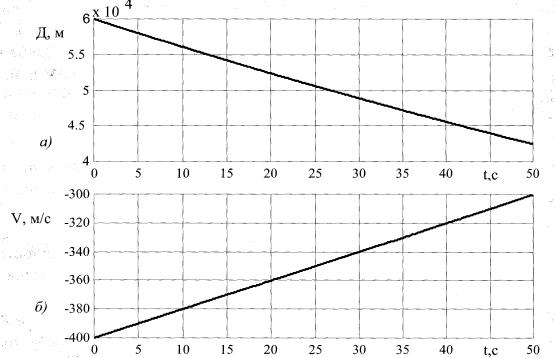
На рис. 3.12, я, б показаны реализации изменения дальности до цели и скорости сближения с ней. На рис. 3.13, а, б и 3.14, а, б для этого варианта при ведены зависимости относительных СКО оценивания дальности Стд/адтахи
скорости сближения σν / oymax для времен обращения к цели Τι и Τι>Τ2 соот ветственно. Пилообразный характер графиков объясняется тем, что в проме жутках между поступлениями измерений возрастают ошибки экстраполяции, а в моменты прихода измерений происходит коррекция оценок фазовых коорди нат по измерениям, которая сопровождается уменьшением ошибок. Мини мальные значения СКО ошибок оценивания фазовых координат σχ ί опреде ляются значениями СКО шумов состояния процесса (3.36)-(3.38) и измерения (3.45), (3.46), а максимальные значения σ χ ί зависят еще и от величины интер вала времени обращения к цели, поскольку эти величины определяют ошибки экстраполяции (3.52).
Рис. 3.12
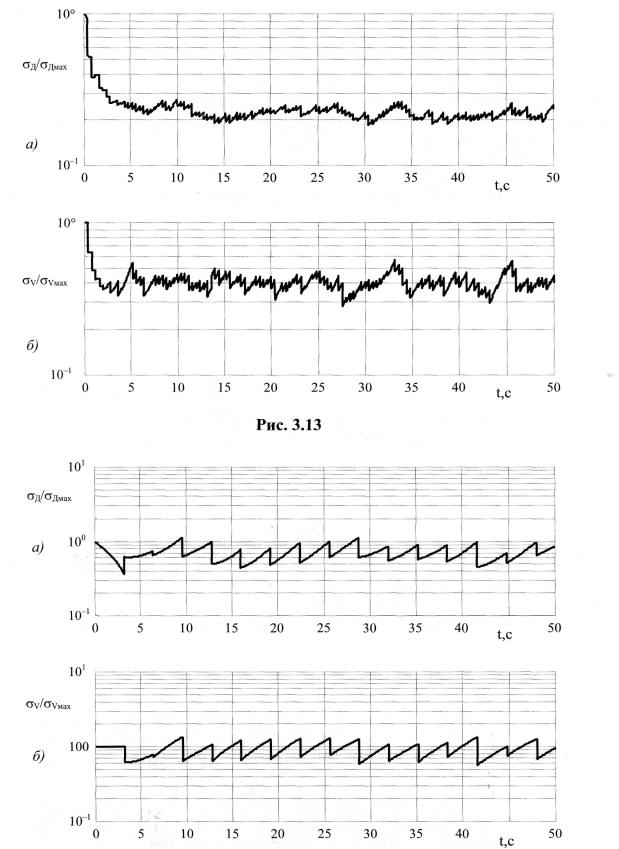
Рис. 3.14

Чувствительность функционала бесстробовой идентификации (3.57) к приходу измерений от другой цели, а также разрешающая способность и дос товерность идентификации радиолокационных измерений, определялись путем имитации измерений от другой цели в момент времени t = 30с с приращением значений дальности и скорости на величины АД = 1000 м и AV = 100м/с соот ветственно. На рис. 3.15 показаны реализации дальности и скорости, и резуль таты их измерений.
Рис. 3.15
На рис. 3.16 и 3.17 показаны изменения функционала I (3.57) соответст венно при наличии приращений по дальности и скорости, который в момент времени t = 30 с имеет максимальное значение и свидетельствует о высокой чувствительности функционала к приходу измерений от другой цели.
Рис. 3.16

Рис. 3.17
На рис. 3.18 и 3.19 приведены графики зависимостей вероятности пра вильного принятия решения о приходе измерений от другой цели Рпр д и Рпр v
от величины приращения ошибки измерений по дальности АД и скорости сближения AV при значениях времени обращения к цели Т\ (штриховая ли ния), Т2>Т1 (пунктирная линия). Разнос целей по дальности при этом изменял ся в пределах 10<АД<1000 м, а по скорости сближения 1<AV<100 м/с. Из
рис. 3.18 видно, что при длительности зондирующего импульса tH = 1 мкс, при которой потенциальное разрешение по дальности определяется величиной 150 м, бесстробовый способ идентификации позволяет практически достоверно раз личать цели даже при достаточно редком обращении к ним.
Рис. 3.18 |
Рис. 3.19 |
Алгоритм бесстробовой идентификации имеет следующие свойства.
1. При приходе измерений от других целей (даже близкорасположенных) функционал (3.57) изменяется на несколько порядков, что позволяет достаточ но просто регистрировать эти изменения. В связи с этим использование мини-

мума функционала в качестве решающего правила является эффективным средством идентификации измерений.
2.С ростом требований к достоверности принятия решения о приходе изме рений от другой цели чувствительность алгоритма идентификации ухудшается.
3.Чувствительность алгоритма идентификации несколько улучшается при уменьшении времени обращения к цели и существенно улучшается при увели чении точности первичных измерений.
4.Способ бесстробовой идентификации на основе адаптивной коррекции прогноза обеспечивает в реальном диапазоне потенциальных разрешающих способностей практически 100%-ую достоверность идентификации в очень широком диапазоне изменений периодов обращения к цели.
Эффективность функционирования алгоритма АСЦРО при сопровожде нии двух целей, движущихся по пересекающимся траекториям, определяется законом пересечения траекторий как по одной, так и по всем измеряемым ко ординатам. На рис. 3.20 и 3.21 а, б представлены взаимное расположение само лета-носителя БРЛС и двух целей, движущихся по пересекающимся траектори ям, а также законы изменения дальности и скорости сближения, соответст вующих ситуации, когда имеет место пересечение по дальности. На рис. 3.22 приведены зависимости функционалов Ιϋ и Ц (3.57) при сопровождении этих целей. Индексы ii (i = 1,2) соответствуют ситуации, когда функционалы вычис ляются при условии, что приходят измерения от i-x (своих) целей, а индексы ij (i, j = 1,2; i Φ)) соответствуют функционалам, вычисляемым при приходе изме рений от «чужих» целей.
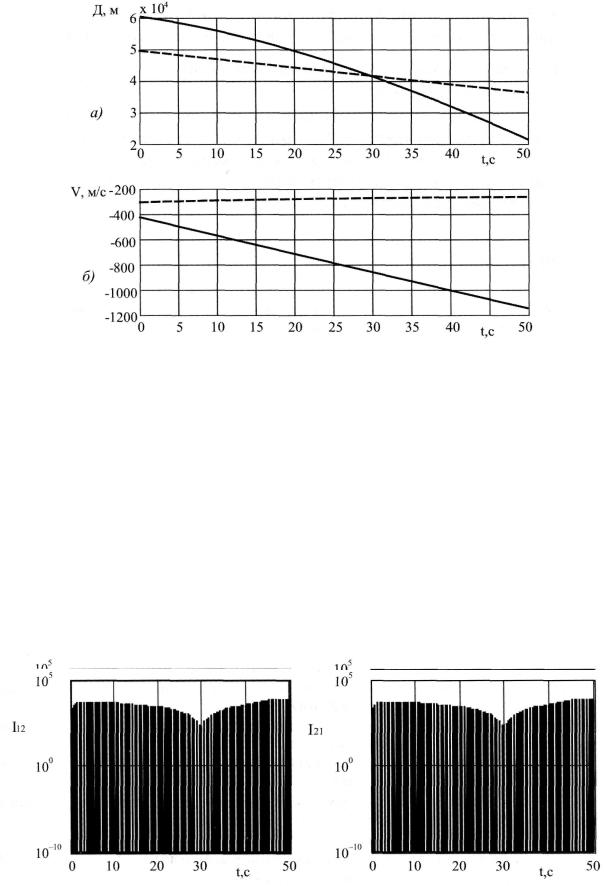
Рис. 3.22
Из рисунков видно, что функционалы реагируют на приход каждого изме рения, при этом скачки функционалов L в одни и те же моменты времени на
несколько порядков превышают скачки функционалов 1Й, в том числе и в мо
менты пересечения траекторий.
Рассмотренный алгоритм АСЦРО с адаптивной коррекцией прогноза и бесстробовой идентификацией радиолокационных измерений дает возмож ность устойчиво и с высокой точностью сопровождать множество целей, в том числе и интенсивно маневрирующих и движущихся по пересекающимся и близкорасположенным траекториям.
Литература
1.Бабич В.К., Баханов Л.Е., Карпеев В.И. и др. Авиация ПВО России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра / Под ред. Е.А. Федосова. - М.: Дрофа, 2001.
2.Баранов Н., Ивенин И., Каневский М. и др. Сверхманевренность - средство побеждать. - Авиапанорама, 1999, № 1.
3.Верба B.C. Управление информационными возможностями многофункциональных бортовых радиолокационных комплексов. - Радиотехника, 2007, № 10.
4.Верба B.C. Формирование режима обнаружения и распознавания наземных целей в много функциональном авиационном комплексе разведки, оповещения и управления. - Радиотех ника, 2006, № 1.
5.Верба B.C., Вакуленко А.А., Дод В.Н., Пильщиков Д. Ε'. Методика выбора в реальном масштабе времени эффективного варианта цифровой обработки радиолокационной информации в мно-, гофункциональном радиотехническом комплексе с трассовым выходом. - Радиотехника, 2005, № 5.
6.Верба B.C., Гандурин В.А., Меркулов В.И. Идентификация радиолокационных измерений при многоцелевом сопровождении. // Тез. Докл. V Всерос. науч.-техн. конф. по радиооптическим технологиям. - Туапсе. М.: МГТУ им. Н.Э. Баумана, 2008.
7.Верба B.C., Дод В.Н., Шкутник Е.Э. Оценка эффекта введения управления процессами циф ровой обработки информации в АК РЛДН оперативно-стратегического назначения в интере сах повышения устойчивости наведения истребителей на воздушные цели. // Материалы XXXIII военно-научн. конф. - Тверь: ВУ ПВО, 2004.
8.Верба B.C., Ефремов А.С, Криштопов А.В. и др. Радиолокационный метод измерения полно го вектора скорости цели. - Радиотехника, 2007, № 10.
9.Дудник П.И., Кондратенков Г.С, Татарский Б.Г. и др. Авиационные радиолокационные комплексы и системы. - М.: ВВИА, 2006.
10.Крутъко П.Д., Максимов A.M., Скворцов Л.М. Алгоритмы и программы проектирования ав томатических систем. - М.: Радио и связь, 1988.
11.Кузьмин СЗ. Цифровая радиолокация. Введение в теорию. - Киев: КВИЦ, 2000.
12.Куликов Е.И., Трифонов А.П. Оценка параметров сигналов на фоне помех. - М.: Сов. радио, 1978.
13.Меркулов В.И. Алгоритмы автоматического сопровождения в режиме обзора с адаптивной коррекцией прогноза и бесстробовой идентификацией радиолокационных измерений. - Радиотехника, 2008, № 1.