

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfкомплекса. При постоянном векторе скорости сигнал имеет доплеровскую час тоту, определяемую радиальной составляющей скорости цели Vr:
Полоса частот сигнала в этом случае зависит от времени когерентной об работки Тс
При маневрировании цели и случайном изменении вектора скорости цели полоса доплеровских частот сигнала определяется случайным (для БРЛС) ра диальным ускорением цели:
В результате возможное время когерентной обработки сигнала Тс должно быть меньше интервала корреляции сигнала xk :
Результаты экспериментальных исследований [11] полосы частот отра женного сигнала в Х-диапазоне приведены ниже для одиночных, умеренно ма неврирующих самолетов (при отсутствии маневра случайная величина ради ального ускорения равна 0,1.. .0,2 g):
Самолет |
Полоса частот, Гц |
МИГ-23 |
24,8 |
СУ-27 |
18,63 |
МИГ-31 |
8,0 |
Распределение плотности вероятности радиального ускорения и, соответ ственно, ширины полосы частот имеет вид гауссовой кривой, СКО ширины Af для одиночных самолетов равно 10 Гц. Полосы доплеровских частот от раженных сигналов при групповом полете самолетов составляют (СКО шири ны полосы частот для группы целей примерно равно 6 Гц):
Вид маневра |
Afqm |
Стационарный полет группы |
10,8 |
Маневр группой |
16,6 |
Догон в группе |
11,35 |
При увеличении длины волны полоса частот уменьшается обратно про порционально 7λ:
что позволяет увеличивать время когерентного накопления при переходе от
λ = 3 κ λ = 7εΜΒ пять раз.
Облако полуволновых диполей как ложная цель имеет объемную удель ную ЭПР
где N - число диполей в одном кубическом метре (обычно меньше одного - трех). Эффективная площадь рассеяния ЭПР облака диполей объемом Уд, если
элемент разрешения РЛС больше облака, определяется равенством
Временные характеристики отраженного от облака сигнала определяются СКО скоростей движения диполей σν .
Корреляционная функция сигнала облака диполей
Типовая величина СКО скоростей движения диполей σν=0,5.. .1,0 м/с.
Крупные стаи птиц (10 птиц в одном квадратном метре площади) могут создавать ложные отметки цели. Средняя величина ЭПР птицы (средний вес
50... 100 г) зависит от диапазона волн. Так, в Х-диапазоне σπ=10" м, в S-диапазоне σπ =0,5·10~3 Μ2 и Р-диапазоне σπ=2·10~5Μ2. ЭПР крупной стаи птиц в S-диапазоне может иметь ац = 0,5 м2 [5].
Скорость движения стаи птиц в основном определяется скоростью ветра и в среднем составляет 5... 10 м/с.
2.3.2. Радиолокационные характеристики морских целей
Основные (типовые) морские цели и их характеристики представлены в табл. 2.6.
Величины ЭПР целей получены путем усреднения известных данных и расчетным путем для Х-диапазона волн и горизонтальной поляризации.

Таблица 2.6
Морские цели |
Длина, м |
Ширина, м |
ЭПР с носа, м2 |
ЭПР с боку, м2 |
Авианосец типа Нимитц |
332,8 |
78,4 |
4-105 |
3-Ю6 |
Крейсер типа Тикондерога |
171,7 |
16,8 |
6103 |
3-Ю5 |
Фрегат типа Перри |
135,6 |
13,7 |
3-Ю3 |
3-Ю4 |
Катер Пегас |
40,5 |
8,6 |
180 |
1800 |
Подводная лодка, всплывшая |
300 |
30 |
10 |
200 |
С увеличением длины волны ЭПР уменьшается. Коэффициенты уменьше ния представлены ниже:
Диапазон волн |
Коэффициент уменьшения ЭПР |
X |
1,0 |
S |
0,8 |
L |
0,4 |
Ρ |
0,2 |
ЭПР морских целей уменьшается также при волнении моря 5...6 баллов примерно в два раза и при вертикальной поляризации - в 1,5 раза.
При волнении моря корабль рыскает по курсу и испытывает бортовую и килевую качку, которая носит периодический характер. Угол отклонения ко рабля от нормального положения определяется соотношением
где Тк - период колебаний.
Соответственно, периодически изменяются фаза и доплеровская частота отраженного сигнала.
Временные характеристики сигнала (период колебаний), отраженного от крупных морских целей, определяются конструкцией корабля и не зависят от степени волнения моря.
Для крейсера период колебаний составляет 5...15 с, а для авианосца - 10...35 с [13]. С уменьшением водоизмещения корабля период колебаний име ет случайный характер и зависит от степени волнения моря.
Колебания по курсу, крену и килю можно считать узкополосным случай ным процессом. Интервал корреляции отраженного сигнала в Х-диапазоне со ставляет 0,5...1,0 с. С ростом длины волны пропорционально увеличивается и интервал корреляции.
Распределение плотности вероятности ЭПР целей полагают равным хиквадрату с четырьмя степенями свободы.
Как и у воздушных целей, наблюдается тенденция уменьшения ЭПР за счет специальной конструкции корабля и использования поглощающих ма териалов.
233. Радиолокационные характеристики наземных целей
Развитие техники АК РЛДН предполагает решение задач радиолокацион ного наблюдения всех классов целей, в том числе малоразмерных наземных. Характеристики основных малоразмерных наземных целей (размеры и ЭПР), усредненные по многим типам целей, представлены в табл. 2.7 (Х-диапазон). В S- и L-диапазонах ЭПР изменяется незначительно, а в Р-диапазоне - возрастает в два-три раза.
Таблица 2.7
Наземные цели |
Размеры, |
ЭПР, м2 |
|
м χ м |
|||
|
|
||
Танки, БМП |
7 x 4 |
4...20 |
|
Автомобиль, тягач |
7 x 3 |
7-15 |
|
Пусковая установка ракет |
10x5 |
20-40 |
|
Истребитель на стоянке |
12 χ 17 |
3-15 |
|
Бомбардировщик на стоянке |
50 χ 40 |
20-100 |
|
|
|
|
При наблюдении целей, размеры которых превышают размер элемента разрешения РЛС, в качестве ЭПР цели используют ЭПР элемента разрешении цели σ3, которая определяется отношением геометрической площади цепи Su к площади элемента разрешения 8Sn:
Групповые цели (стоянка самолетов, танковые подразделения, батареи ра кет и т. п.) характеризуются расстоянием между элементами цели в местах со средоточения 70...120 м и на марше 30...50 м, а также максимальной скоро стью движения (40 км/ч).
Самолеты на стоянке в зависимости от типа располагаются на расстояниях 40...75 м.
Время корреляции отраженного сигнала при движении наземной цели оп ределяется прежде всего рельефом местности. Так, сигнал, отраженный от тан ка, двигающегося по пересеченной местности, имеет интервал корреляции 0,2.. .0,3 с в Х-диапазоне.
С ростом длины волны время корреляции пропорционально увеличива
ется.
Статистические характеристики (распределение вероятностей) ЭПР мало размерных наземных целей определяются законом «хи-квадрат» с четырьмя степенями свободы.
2.3.4. Радиолокационные характеристики земной и водной поверхностей
Эффективная площадь рассеяния земной и водной поверхностей характери зуется удельной величиной σ0 ЭПР одного квадратного метра. В табл. 2.8 пред ставлены величины удельной ЭПР различной земной и водной поверхностей, ус редненных по многим справочным данным и собственным исследованиям.
Таблица 2.8
Объекты |
Угол |
λ = 3,0 см |
λ = 10 см |
λ = 23 см |
λ = 70 см |
|||||
падения |
гг |
вв |
ГГ |
ВВ |
ГГ |
ВВ |
ГГ |
ВВ |
||
|
||||||||||
Море, волнение |
10 |
-40 |
-32 |
-А2 |
-40 |
^15 |
^ 5 |
-50 |
-50 |
|
|
|
|
|
|
|
|
|
|
||
20 |
-38 |
-28 |
-39 |
-35 |
-40 |
-40 |
-45 |
^ 5 |
||
2 балла |
||||||||||
50 |
-35 |
-30 |
-36 |
-33 |
-38 |
-36 |
-35 |
-А2 |
||
|
||||||||||
Море, волнение |
10 |
-35 |
-30 |
-33 |
-30 |
-30 |
-30 |
-35 |
-35 |
|
20 |
-30 |
-25 |
-29 |
-25 |
-29 |
-25 |
-32 |
-32 |
||
6 баллов |
||||||||||
50 |
-27 |
-22 |
-27 |
-22 |
-28 |
-23 |
-30 |
-30 |
||
|
||||||||||
Взлетно-посадочная |
10 |
^ 0 |
-30 Ί |
-40 |
-35 |
^ 5 |
-40 |
-60 |
-60 |
|
20 |
-32 |
-24 |
-35 |
-30 |
-40 |
-36 |
-58 |
-58 |
||
полоса |
||||||||||
|
|
|
|
|
|
|
|
|
||
50 |
-20 |
-18 |
-25 |
-23 |
-30 |
-27 |
-55 |
-55 |
||
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
10 |
-23 |
-23 |
-35 |
-35 |
-33 |
-35 |
-60 |
-60 |
|
|
|
|
|
|
|
|
|
|
|
|
Степь, зима, снег |
20 |
-17 |
-17 |
-30 |
-30 |
-30 |
-30 |
-55 |
-55 |
|
|
50 |
-14 |
-14 |
-23 |
-23 |
-23 |
-23 |
-50 |
-50 |
|
|
3 |
-35 |
-35 |
-35 |
-35 |
-40 |
-40 |
-60 |
-60 |
|
Степь, лето, трава |
10 |
-16 |
-16 |
-20 |
-20 |
-28 |
-28 |
-55 |
-55 |
|
20 |
-15 |
-15 |
-19 |
-19 |
-25 |
-25 |
-53 |
-53 |
||
|
||||||||||
|
50 |
-12 |
-12 |
-16 |
-16 |
-20 |
-20 |
-50 |
-50 |
|
Пустыня, камни, |
10 |
-18 |
-20 |
-30 |
-35 |
-35 |
-35 |
-45 |
^15 |
|
|
|
|
|
|
|
|
|
|
||
20 |
-15 |
-17 |
-28 |
-33 |
-30 |
-30 |
-40 |
^ 0 |
||
песок |
||||||||||
50 |
-12 |
-14 |
-15 |
-15 |
-15 |
-17 |
-35 |
-35 |
||
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
10 |
-14 |
-14 |
-21 |
-22 |
-25 |
-23 |
-35 |
-35 |
|
|
|
|
|
|
|
|
|
|
|
|
Лес |
20 |
-14 |
-15 |
-20 |
-21 |
-20 |
-18 |
-30 |
-30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
-12 |
-12 |
-14 |
-14 |
-14 |
-14 |
-25 |
-25 |
|
|
|
|
|
|
|
|
|
|
|
|
Величина σ0 определяется в основном соотношением размера неровно стей поверхности и длины волны, а также углом падения и поляризацией волны.
Неоднородности поверхности по высоте h характеризуются СКО высоты ah и радиусом корреляции rh . Радиус корреляции значительно больше СКО высот: rh = Khoh . Ниже даны значения Kh для типовых местностей [13].
Тип местности |
Kh |
Лес |
2 |
Луг с кустарником |
5 |
Степь |
6 |
Пустыня |
8 |
Лед серый... |
15 |
Если размер неоднородностей меньше длины волны, то рассеяние имеет диффузный характер.
При размере неоднородностей, сравнимых с длиной волны, наблюдается резонансное отражение, как, например, у полуволнового диполя.
При больших размерах неоднородностей отражение имеет сложный ха рактер взаимодействия различных волн, поэтому характеристики отражения реальных поверхностей обычно получают экспериментальным путем.
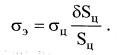
При уменьшении угла φΗ падения волн на поверхность (φΗ <10°) величина σο ровных поверхностей падает пропорционально sin φΗ. На рис. 2.4 в качестве примера представлены графики изменения σ0 в зависимости от φΗ сельскохо зяйственных районов местности средних широт.
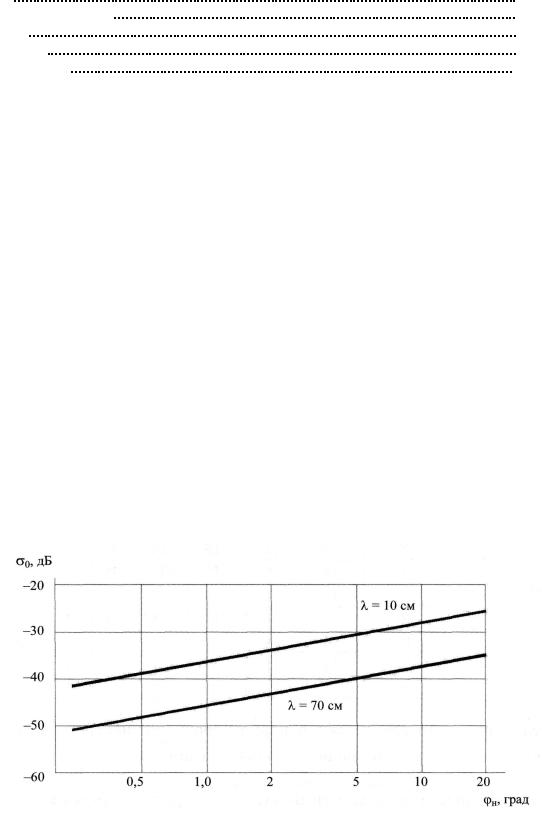
С увеличением длины волны (L-, Р-диапазона) начинаются изменения характера отражения от земной поверхности. Геометрические размеры неод нородностей поверхности и ее внутренней структуры оказываются меньше или соизмеримыми с длиной волны. Рассеяние от мелкоструктурных поверх ностей (ВПП, степь) имеет диффузный характер, и удельная ЭПР резко пада ет (рис. 2.5).
При расчете характеристик комплексов Е-2 и Е-3 использовались модели изменения ЭПР различной местности во всем диапазоне углов <рн, усредненные по многим экспериментальным данным (рис. 2.6, 2.7) [6].
Рис. 2.4
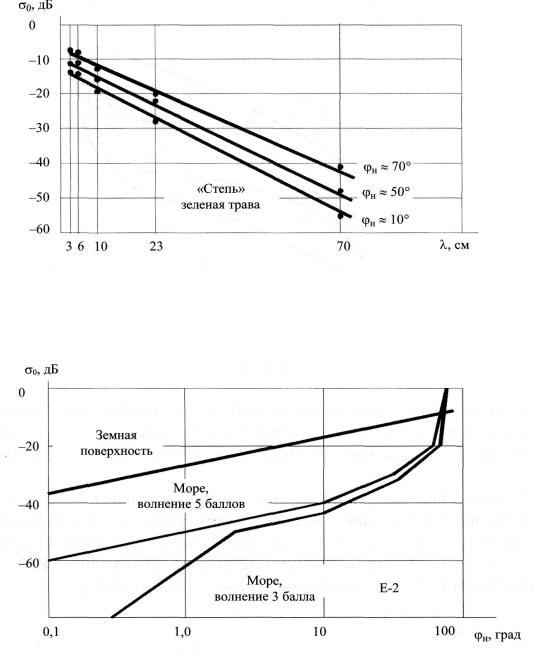
Рис. 2.5
Рис. 2.6
Удельная ЭПР (σ0) больших участков земной поверхности представляет собой пространственно неоднородный случайный процесс.
При обнаружении малоразмерных целей на фоне отражений от земной по верхности в режиме однозначного измерения дальности и азимута в пределах зоны расположения групповых целей удельную ЭПР можно считать кусочнооднородным процессом (степь, ВПП, лес, море и т. п.) В пределах расположе ния целей удельная ЭПР постоянна.
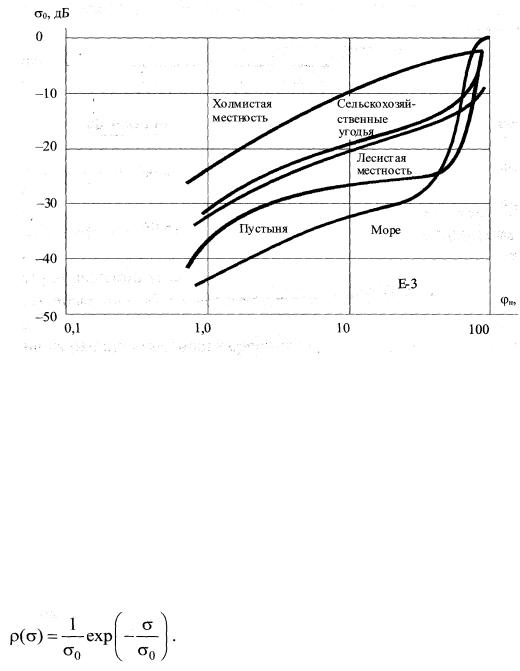
Рис. 2.7
В режиме обнаружения низколетящих целей при высокой и средней час тотах повторения сигнал фона является суммой сигналов многих разнесенных по дальности и углу элементов земной поверхности, имеющих разные значе
ния σ0.
При использовании различных моделей распределения плотности вероят ности удельной ЭПР земной и водной поверхностей в Х-, S-диапазонах (Вейбулл, Гамма, К, экспонента, логнормальный) обычно получают сравнимые ре зультаты (в пределах ошибок экспериментальных измерений ЭПР), поэтому часто используют экспоненциальную модель удельной ЭПР фона:
Кроме равномерного фона, структура поверхности имеет отдельные не ровности (ямы, канавы, бугры, стволы крупных деревьев). Так как шерохова тость поверхностей таких неоднородностей мала по сравнению с длиной волны в L-, Р-диапазонах, их изображение становится подобным точечному объекту со стабильным фазовым центром. Наличие таких «зеркальных» точек в функ ции отражения однородного случайного поля изменяет распределение плотно сти вероятности удельной ЭПР.
При разрешении 20...50 м число таких неровностей в степи (точек изо бражения) составляет 2 5 ^ 5 на 1 м2, при этом ЭПР точек στ больше ЭПР рав номерного фона σφ на 10...15 дБ [12].
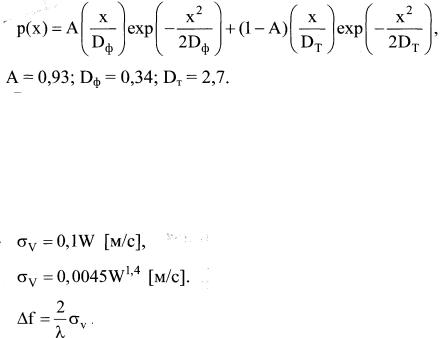
Распределение амплитуд отраженных сигналов фона и точек подчиняется рэлеевскому закону с различными дисперсиями DT и Όφ. Вероятность больших амплитуд имеют точечные отражатели. Отношение дисперсий Ότ/Όφ зависит от типа местности и разрешающей способности РЛС и равно 8... 12.
В результате распределение амплитуд отраженных от земной поверхности сигналов в L-, Р-диапазонах равно сумме двух рэлеевских распределений. «Би модальный рэлеевский» закон распределения амплитуд для РЛС Е-2 (λ = 70 см) имеет вид [5]
где
Временные характеристики удельной ЭПР земной и водной поверхно стей определяются прежде всего скоростью ветра W, от которого зависят сте пень волнения моря и скорость колебаний крон деревьев и кустарников. Оце ночные значения СКО скоростей морской поверхности и деревьев соответст венно равны
9-
Полоса частот отражаемых сигналов
В S-, Р-диапазонах работы РЛС спектр отраженных сигналов находится в пределах единиц герц.
Кроме случайных составляющих скорости движения морской поверхности с СКО, равным σν, существуют элементы разрешения с регулярным движением волны в направлении РЛС, формирующие точечные квазикогерентные отражате ли с временем корреляции 0,1...0,5 с. Если плоскость морской волны направлена по нормали к направлению излучения, то ЭПР такого отражателя в Х-диапазоне намного превышает средний уровень отражения. Такие стабильные отражатели увеличивают вероятность ложной тревоги и имеют название «долбяки».
2.4. Характеристики среды распространения электромагнитных волн
Основными параметрами среды распространения, определяющими харак теристики БРЛС, являются степень затухания (поглощения) волны, отклонение

от прямолинейности распространения (рефракция) и фазовые флуктуации вол ны, обусловленные неоднородностью среды распространения.
Затухание волны определяется как свойствами среды, так и длиной пути распространения волны от РЛС до цели и обратно в слое атмосферы и дождя (рис. 2.8).
Рис. 2.8
Длина пути в атмосфере ограничена дальностью прямой видимости и за висит от высоты полета носителя РЛС и цели (рис. 2.9). При высотах Нс > 9 км волна проходит весь основной слой атмосферы четыре раза: два раза при облу чении цели и два раза при обратном распространении волны.
Наибольшее затухание в атмосфере определяется двумя причинами: нали чием водяных паров и наличием дождя. При отсутствии дождя затухание в стандартной атмосфере зависит от длины волны и для рассматриваемого слу чая (рис. 2.8) величины затухания составляют:
Длина волны, см |
Затухание, дБ |
3 |
5 |
10 |
3 |
70 |
1,5 |
Рис. 2.9
Дождь вносит значительно большее затухание. На рис. 2.10 представлены графики зависимости затухания в дожде различной интенсивности и разной