

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
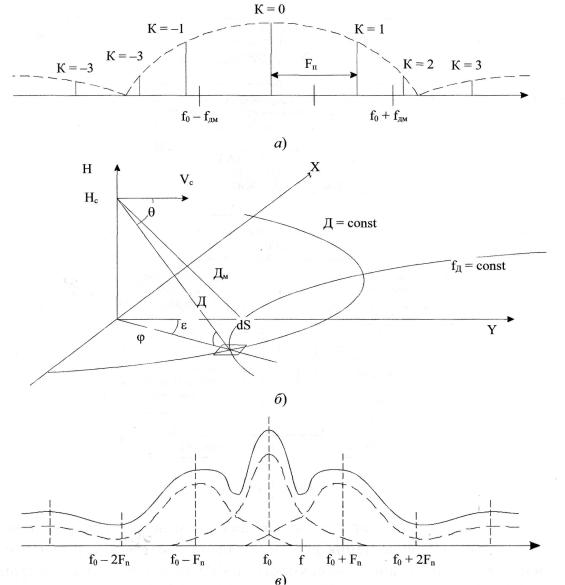
.pdfа) Медленные флуктуации
б) Быстрые флуктуации
Рис. 2.16
При быстрых флуктуациях от пачки к пачке требуемое отношение сиг нал/шум при Рп0 = 0,9 равно 11 дБ (рис. 2.16, б).
Обычно задается отношение сигнал/шум, равное 13 дБ, что обеспечивает за три обзора Рпо = 0,95 при Рлт = 10~6.
Определение вероятности обнаружения низколетящей цели при наблюде нии сигнала цели на фоне отражений от подстилающей поверхности требует вычисления уровня мощности фона в элементе разрешения цели по дальности и скорости с учетом мощности помехи. Мощность сигнала цели определяется теми же параметрами БРЛС, как и в случае обнаружения сигнала без фона. Мощность фона зависит от многих параметров РЛС и подстилающей поверх ности.
На рис. 2.17 показан случай формирования сигнала фона в режиме ВЧП, когда обеспечивается однозначное соответствие скорости цели и доплеровской частоты при неоднозначности по дальности.
В элемент разрешения сигнала цели по задержке и частоте попадают сиг налы, отраженные от подстилающей поверхности в элементах разрешения на местности по горизонтальной дальности 5Д и азимуту δ 1:
где φ - угол места элемента разрешения относительно вектора путевой скоро сти носителя, 5г - разрешение по наклонной дальности;
определяется разрешением по частоте |
при азимутальном угле наблю |
дения фона 9ф относительно вектора путевой скорости носителя.
Соответственно, мощность сигнала фона одного элемента разрешения оп ределяется величиной ЭПР фона 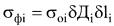 .Величина удельной ЭПР σ0
.Величина удельной ЭПР σ0
зависит от типа местности и угла места φ. Для БРЛС комплексов Е-2 и Е-3 на основании экспериментальных и расчетных данных сформированы модели удельных ЭПР фона σ0(φ) (см. рис. 2.7, 2.8).
Элементы разрешения фона лежат на пересечении линии равной допле ровской частоты (изодопы) с линиями равных дальностей, следующих с перио
дом |
(6 км при Fn = 25 кГц). Число элементов дальности находится |
значением |
, где Дтах определяется дальностью радиогоризонта. |
На рис. 2.17 область пересечения показана отдельно (в кружочке). Доплеровская частота изодопы соответствует частоте цели
где У - радиальная составляющая скорости цели в направлении БРЛС, θ -
угол сканирования ДН антенны по азимуту в направлении на цель на большой дальности (фц « 0).
Рис. 2.17
Доплеровская частота цели определяет доплеровскую частоту фона L· = f4 и,
соответственно, угол θφ относительно вектора путевой скорости ,
необходимый для расчета разрешения по азимуту.
Мощность фона в элементе разрешения цели определяется суммой мощ ностей фона каждого разрешаемого по дальности элемента фона
По сравнению с мощностью сигнала цели при расчете отношения сиг нал/фон мощность фона определяется не только ЭПР фона σ^, но и другим
коэффициентом усиления антенны |
ι, который зависит от координат |
элемента фона. Кроме того, потери при обработке сигналов фона меньше на 3...5дБ по сравнению с обработкой сигнала цели. Это объясняется малым влиянием рассогласования характеристик системы обработки и сигналов фона, так как при рассогласовании происходит перераспределение сигнала фона ме жду элементами разрешения, не изменяя его мощности.
При учете приема фона по боковым лепесткам выходного сигнала согла сованной системы обработки (функции неопределенности) задача расчета мощности фона еще более усложняется. Поэтому такие расчеты обычно прово дят методом математического имитационного моделирования с учетом стати стики сигналов и фона.
В результате пороговой обработки сигналов формируются данные целей для последующей (вторичной) обработки:
номер канала задержки (неоднозначной дальности); номер канала частоты (скорости);
азимут (среднее значение угла из четырех обнаруженных пачек); угол места (сканированием ДН либо моноимпульсным методом).
2.8.2.Оценка характеристик обнаружения низколетящих воздушных целей Б РЛС с квазинепрерывным излучением
Получение оценок характеристик бортовой РЛС с трассовым выходом изза большой размерности задачи требует разработки калибруемых по экспери ментальным данным математических моделей с имитацией процессов зондиро вания пространства, обнаружения отметок на различных частотах повторения от ВЦ в доплеровско-дальностных каналах, устранения неоднозначности по дальности, реализации первичной и вторичной обработок добываемой инфор мации. Для повышения точности оценок характеристик обнаружения необхо димо одновременно учесть законы флуктуации эффективной поверхности рас сеяния ВЦ, наличие альтиметровых помех в бортовой РЛС, нестационарность в пространстве и во времени потока ложных отметок, обусловленных как пере отражениями от подстилающей поверхности, так и наличием в каналах обра ботки ложных отметок комбинационного характера при неверном устранении неоднозначности по дальности.
Далее приводится методика определения характеристик обнаружения
низколетящих воздушных целей методом имитационного моделирования.
Используются обозначения, как в оригинале [3].
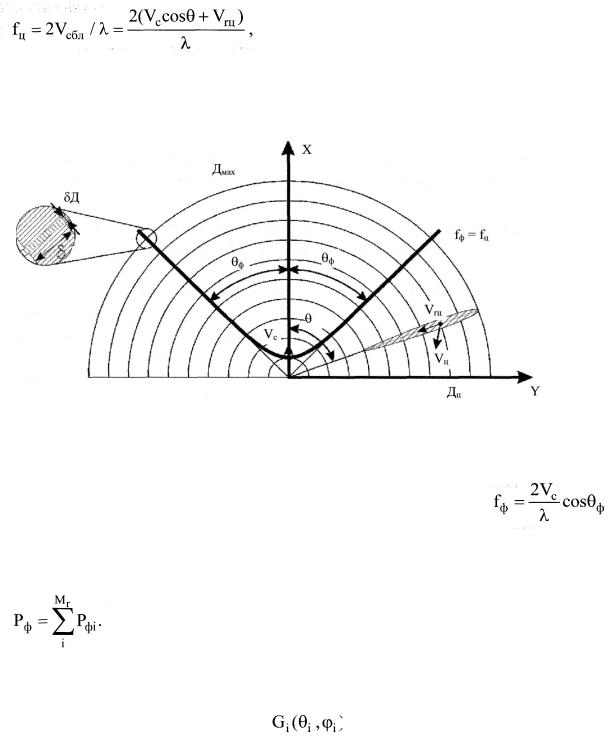
Бортовая РЛС с переключением частот повторения импульсов (ЧПИ) из лучает когерентную последовательность зондирующих радиоимпульсов, спектр которых представлен на рис. 2.18, а, длительностью ти и ЧПИ Fnl,Fn2 и т. д. Авиационный носитель перемещается равномерно и прямолинейно на вы соте Нссо скоростью Vc (рис. 2.18, б). Принятые колебания состоят из полез ного сигнала, активных и пассивных помеховых колебаний, отраженных под стилающей поверхностью (рис. 2.18, в). Мощность помех на входе бортовой РЛС зависит от среды распространения радиоволн, диаграмм направленности приемной и передающей антенн, свойства подстилающей поверхности и
других факторов. Необходимо получить последовательность и расчетные вы ражения оценок характеристик данного класса РЛС в условиях реального функционирования.
Обобщенный алгоритм оценки характеристик обнаружения ВЦ приведен на рис. 2.19. В этом случае с учетом движения авиационного носителя опреде ляется уровень отраженных подстилающей поверхностью сигналов в каждом доплеровском канале, рассчитываются отношения сигнал/помеха и вероятно сти обнаружения ВЦ.
Применяются две основные системы координат: сферическая (в,<р,Д), центром которой является фазовый центр антенны, и декартовая система (Χ,Υ,Η) с центром в точке пересечения перпендикуляра, опущенного из цен тра, с поверхностью земли (см. рис. 2.18, б).
Рис. 2.18
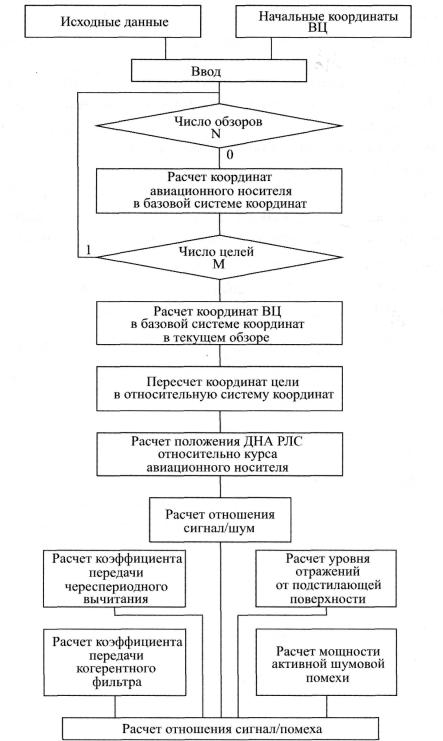
Рис. 2.19
Направление оси OY совпадает с направлением вектора скорости авиаци онного носителя. Для упрощения решения задачи предполагается, что можно пренебречь кривизной земной поверхности и влиянием среды распространения радиоволн.
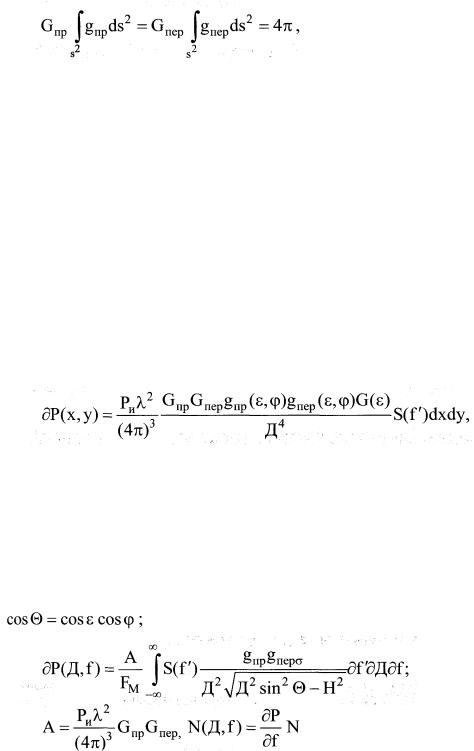
Нормированные диаграммы направленности приемной и передающей ан тенн задаются функциями gnp(e,(p) и gnep(s,(p), так что
(2.1)
где S2 - сфера с единичным радиусом; ds2 - элемент площади сферы; Gnp, Gnep -
коэффициенты усиления антенн.
Свойства обратного рассеяния различных подстилающих поверхностей, характеризующиеся удельной поверхностью обратного рассеяния β(ε), пока зывают, какая часть мощности отражается малым участком подстилающей по верхности в обратном направлении под углом к горизонтальной плоскости. В общем случае значение G(e) зависит от угла падения, длины волны, вида подстилающей поверхности, вида поляризации падающей и рассеянной волн. Для основных видов подстилающей поверхности (лес, пашня, поле, вода и др.) Θ(ε) определяется экспериментально.
Пусть S(f) - спектр излученного сигнала. Рассмотрим составляющую спектра на частоте f'. Мощность сигнала на входе БРЛС, отраженная элемен тарной площадкой с центром в точке (х, у), определяется в соответствии с уравнением радиолокации
где Ри - импульсная мощность.
Мощность принятого колебания в интервале частот [f, f + δί] определяется путем замены координат (х, у) на (Д,1*д) и интегрирования по f (рис. 2.18, б);
1д = f - f' - доплеровская частота; f - частота, на которой принимается помеховое колебание;  ,
,
- спектр принятого колебания.
Если спектр сигнала дискретный, то интегрирование по f' заменяется сум мированием. Чтобы определить спектр сигнала, отраженного кольцом дальности шириной АД и внутренним радиусом Д, необходимо проинтегрировать N(fl, f) по переменной Д:
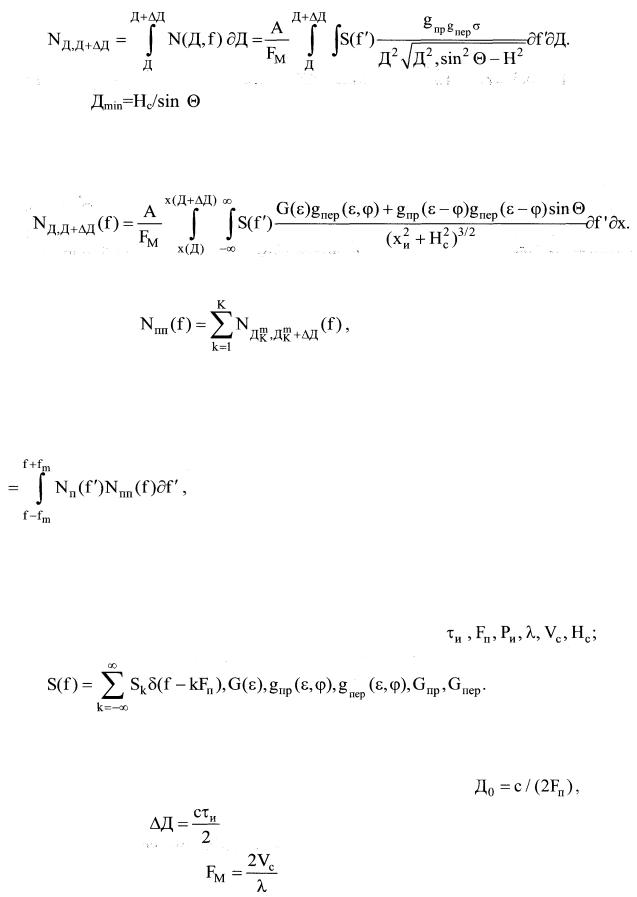
(2.2)
Если |
лежит в интервале Гд,Д + ДЦ], подынтегральное вы |
ражение не определено. В этом случае необходимо сделать замену переменной интегрирования  после чего (2.2) принимает вид
после чего (2.2) принимает вид
Тогда распределение мощности помех по частоте и каналам дальности оп
ределяется как где К - число интервалов неодно
значности дальности в пределах горизонта; Д^ - КД0 + тАД - внутренний ра
диус кольца дальности т-го канала на К-м интервале неоднозначности. Спектральная плотность мощности шумов генератора передатчика бор
товой РЛС, переотраженная подстилающей поверхностью, Nmr(f) = где Νπ - спектральная плотность мощности шумов пе
редатчика, Νππ - спектральная плотность мощности отражений от подстилаю
щей поверхности.
В итоге вычисление спектра помех, отраженных подстилающей поверхно стью, осуществляется численными методами.
Пусть, например, заданы следующие параметры:
Необходимо вычислить значение спектра помеховых колебаний N(f, m) на частоте f в канале дальности с номером т. Предварительно опре
деляется интервал однозначного измерения дальности |
где с - |
||
скорость |
света, |
- разрешающая способность по дальности, Дг - |
|
дальность |
горизонта, |
- максимально возможная |
доплеровская |

частота, - максимальная частота в пределах дальности
- максимальная частота в пределах дальности
горизонта, К^ и К2 - номера минимальной и максимальной спектральных со ставляющих, вносящих вклад в формирование значения N(f,m) имеют вид
- число интервалов однозначности по дальности в пределах горизонта.
Затем проверяется, попадает ли точка Дг в m-й канал дальности: если  , то значение N2 уменьшается на единицу. Для каждого к€{к15...к2} вычисляется вклад k-й составляющей спектра акв значение
, то значение N2 уменьшается на единицу. Для каждого к€{к15...к2} вычисляется вклад k-й составляющей спектра акв значение
N(f,m):
где 0к - угол, определяющий гиперболу, соответствующую доплеровской час тоте  - минимальное расстояние от носителя бортовой РЛС до гиперболы доплеровской частоты fk(cM. рис. 2.18). При этом нижний предел интегрирования по дальности в по следнем интервале однозначности вычисляется как
- минимальное расстояние от носителя бортовой РЛС до гиперболы доплеровской частоты fk(cM. рис. 2.18). При этом нижний предел интегрирования по дальности в по следнем интервале однозначности вычисляется как  , причем если Дп < Д т , то полагается отсутствие помехи и переходим к следующему
, причем если Дп < Д т , то полагается отсутствие помехи и переходим к следующему
значению к. Если 0к не удовлетворяет условию  то находится
то находится
расстояние до той точки гиперболы f = fK, в которой касательная к ней образу ет угол π/4 с осью оу:
Замечание. На отрезке [Дм, Дп ] интегрирование осуществляется по пере
менной |
а на отрезке |
- по Д. |
Если |
то значение Ν3 |
уменьшается на единицу. Впо |
следствии определяется номер интервала дальности, в который попадает точка
Если |
, то необходимо увеличить зна |
чение на единицу. |
|

Вычисление уровня помехи в к-м доплеровском канале дк осуществляется по следующей формуле:
где 
Тогда значение спектра помехи от подстилающей поверхности для борто вой РЛС, использующей квазинепрерывный режим, определяется как
Оценка эффективности управления порогом обнаружения в бортовой РЛС с учетом сформированной области селекции приоритетной воздушной цели (Os) на этапе вторичной обработки и разрешающих способностях  ι станции осуществляется путем определения конечного множества элементов разрешения (Ωη) на каждой частоте повторения с изменяемым порогом обна ружения
ι станции осуществляется путем определения конечного множества элементов разрешения (Ωη) на каждой частоте повторения с изменяемым порогом обна ружения
где Νη - общее число элементов разрешения с изменяемым порогом обнаруже ния; ФгД - оператор отображения, определяющий преобразование неоднознач но измеряемых координат на различных частотах повторения в сферические
координаты  - номера каналов обнаружения многока
- номера каналов обнаружения многока
нального приемника по отдельным координатам, в которых осуществляется изменение порога.
В дальнейшем для определяемого допустимого уровня снижения ложных тревог (F^on)) проводится оценка реализуемых показателей обнаружения в
рассматриваемых секторах сопровождения. Для повышения точности оценки вероятности обнаружения ВЦ используется модель флуктуации ЭПР, подчи ненная логарифмическому закону распределения, аппроксимируемая следую щим выражением:
где