2.3. Естественная освещенность
Элементы освещенности представлены в таблице 2.3.1 для портов прихода и отхода. В качестве промежутка времени возьмем данные с 07.10.2017 по 18.10.17 из пособия ADMIRALTY Total Tide.
Таблица 2.3.1
Элементы освещенности
|
Дата |
Начало навиг. сумерек |
Солнце Тс Восх. |
Солнц. А восх. |
Солн. Тс Заход |
Солн. А зах. |
Конец нав. сумерек |
Луна Тс восх |
Луна Тс заход |
Возраст луны |
|
07.10 |
05.24 |
06.13 |
096 |
17.59 |
264 |
18.49 |
19.29 |
07.35 |
7 |
|
08.10 |
05.24 |
06.14 |
096 |
17.58 |
264 |
18.48 |
20.15 |
08.38 |
8 |
|
09.10 |
05.24 |
06.14 |
097 |
17.57 |
263 |
18.17 |
21.06 |
09.42 |
9 |
|
10.10 |
05.25 |
06.14 |
097 |
17.56 |
263 |
18.46 |
22.00 |
10.45 |
10 |
|
11.10 |
05.25 |
06.15 |
097 |
17.55 |
262 |
18.45 |
22.57 |
11.47 |
11 |
|
12.10 |
05.26 |
06.15 |
098 |
17.54 |
262 |
18.44 |
23.56 |
12.45 |
12 |
|
13.10 |
05.26 |
06.16 |
098 |
17.53 |
262 |
18.43 |
- |
13.39 |
13 |
|
14.10 |
05.27 |
06.16 |
099 |
17.52 |
261 |
18.42 |
00.57 |
14.28 |
14 |
|
15.10 |
05.27 |
06.17 |
099 |
17.51 |
261 |
18.41 |
01.57 |
15.14 |
15 |
|
16.10 |
05.27 |
06.17 |
099 |
17.50 |
260 |
18.40 |
02.56 |
15.55 |
16 |
|
17.10 |
05.28 |
06.18 |
100 |
17.49 |
260 |
18.39 |
03.53 |
16.35 |
17 |
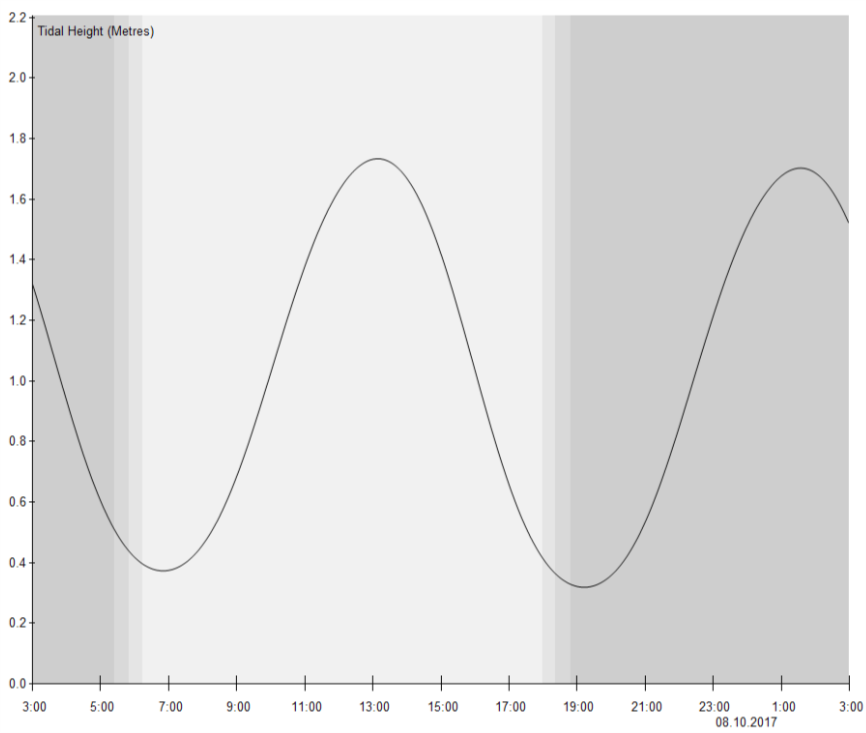
Приливные явления
Приливно-отливные явления являются немаловажным фактором для навигации судов на мелководье. В нижеприведенной таблицах указаны приливы и отливы в портах прихода и отхода, а также их графики.
Таблица 2.4.1
Предвычисление приливов в порту Rashid на 07.10.2017 г
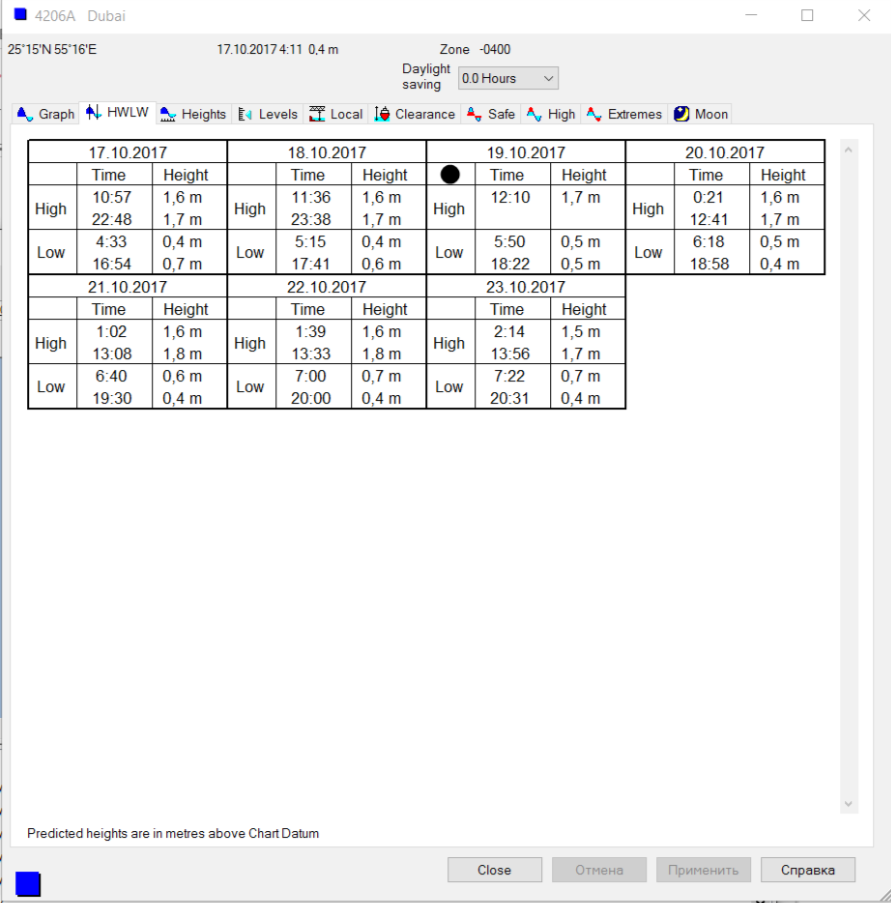
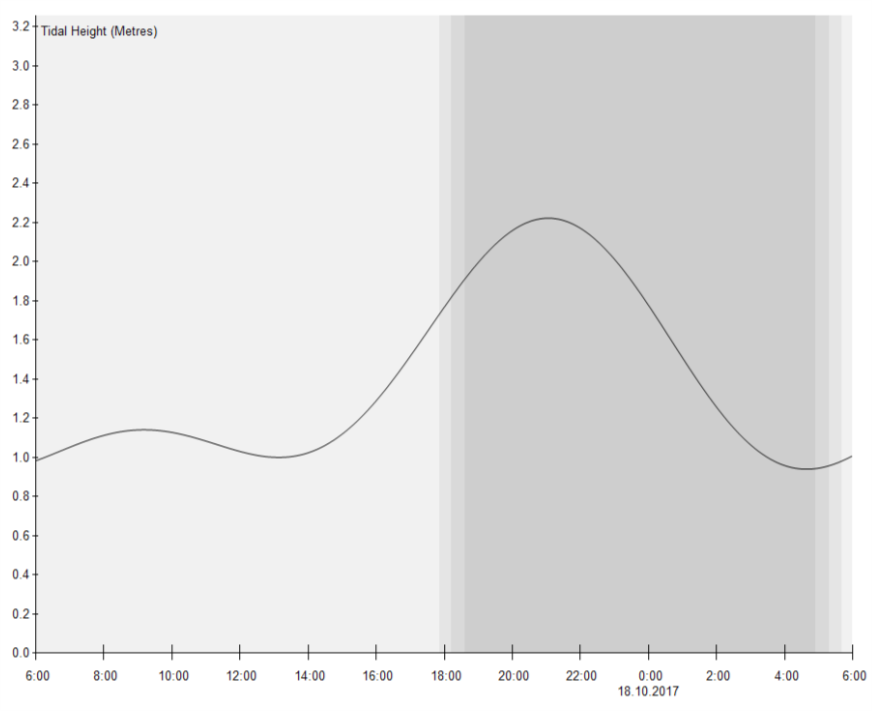
Таблица 2.4.2
Предвычисление приливов в порту Palembang на 17.10.2017 г

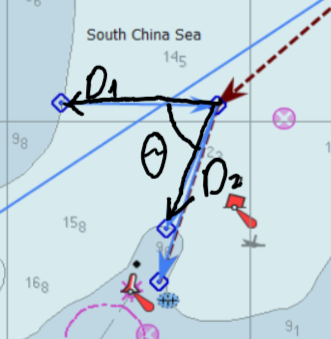
Расчет и построение маршрутного графика точностей
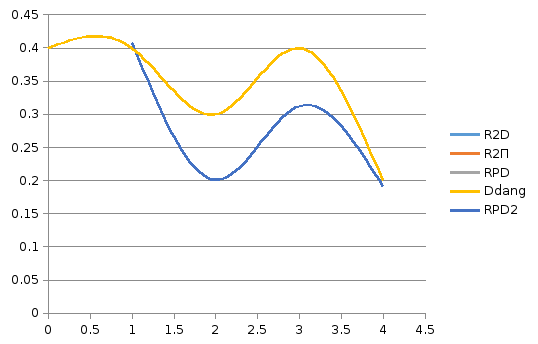
Когда путь судна проходит в непосредственной близости от навигационных опасностей, существенную помощь в оценке точности контроля за движением судна окажет маршрутный график точностей, который дает наглядное суждение о точности всех возможных обсерваций вдоль опасного участка плавания.
Расчет и построение такого графика необходимо выполнить для выделенного по согласованию с руководителем курсовой работы опасного участка, в нашем случае – Малаксккий пролив.
Маршрутный график точностей рассчитывают и строят для трех способов определения места судна: по двум гирокомпасным пеленгам, по двум радиолокационным дистанциям и по гирокомпасному пеленгу и радиолокационной дистанции.
Точность обсерваций оценивают радиусами R 95%-ных кругов погрешностей, как этого требуют "Стандарты точности судовождения", рекомендованные ИМО, для чего используют формулы:
![]() ,
,
![]() ,
,
 .
.
При расчетах принимают mП = 0.6°, mD = 0.01 от Dmax, где Dmax - шкала дальности, на которой ведутся наблюдения.
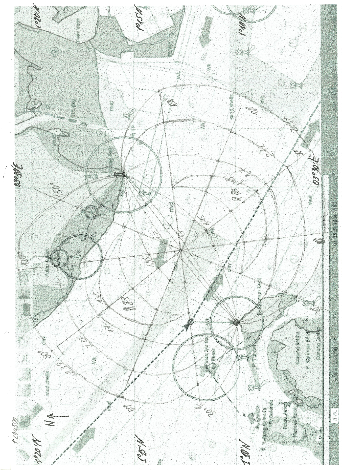
Результаты вычислений описаны в таблице 2.4.1. и на графике..
Таблица 2.4.1
Маршрутный график точности
|
|
1 |
2 |
3 |
4 |
|
D1, кбт |
8,8 |
13,6 |
8,6 |
11 |
|
D2, кбт |
15 |
9,3 |
17,1 |
20,9 |
|
П1° |
20 |
16 |
24 |
35 |
|
П2° |
70 |
67 |
93 |
67 |
|
RПП, кбт |
0,161585 |
0,160426 |
0,146368 |
0,194278 |
|
RDD, кбт |
0,878081 |
0,578409 |
0,598227 |
1,021399 |
|
RПD1,кбт |
0,377249 |
0,211354 |
0,242391 |
0,281098 |
|
RПD2,кбт |
0,40832 |
0,201234 |
0,312331 |
0,191209 |
В заключение данного пункта можно уточнить, что наиболее подходящим методом для ОМС с наибольшей точностью для данного участка является метод определения места судна по пеленгу и дистанции.
Расчет и построение сетки изолиний точностей
Сетки изолиний точностей дают наглядное представление о точности обсерваций в районе плавания судна. Они позволяют быстро и обосновано выбрать путь судна или место якорной стоянки наилучшим образом обеспеченное обсервациями и оценивать точность определений места судна без затрат времени на расчеты и построения.
В данном курсовом проекте построены сетки изолиний точностей для обсерваций по двум гирокомпасным пеленгам.
![]()
где mп =0,5°, и mΔГК=1,0°
Таблица 2.6.1.
Длины радиус-векторов изолиний для определения места судна по двум пеленгам
|
θ |
μ | ||||||
|
1,7 |
1,45 |
0,83 |
1,45 |
1,7 |
2,12 |
2,39 | |
|
30°(150°) |
0 |
- |
- |
- |
0,88 |
1,09 |
1,12 |
|
60°(120°) |
0,36 |
0,46 |
- |
0,85 |
0,91 |
0,99 |
1,2 |
|
90° |
0,34 |
0,42 |
0,6 |
0,9 |
1,11 |
1,19 |
1,23 |
Оценка навигационной безопасности
Обеспечение навигационной безопасности - необходимое условие эффективной работы флота, охраны человеческой жизни на море и защиты окружающей среды от загрязнения.
Навигационная безопасность оценивается вероятностью Р отсутствия навигационных аварий в течение определенного времени. К навигационным авариям относятся все случаи касания судном грунта, вследствие ошибок выбора пути и проводки по нему судна. Вероятность P такого события зависит от расстояния до опасности D и среднеквадратической погрешности mD, с которой известно это расстояние. При расчетах расстояния до опасности следует считать расстояние до изобаты, определенной судоводителем как предельно безопасной. Пересечение судном этой изобаты угрожает столкновением судна с подводным препятствием.
Погрешность mD зависит от погрешности места судна dмс и погрешности положения опасности dпо.
![]() (2.4)
(2.4)
Значение dмс равно проекции эллипса погрешностей места судна, в момент кратчайшего сближения с опасностью, на нормаль к линии пути судна. Такую проекцию называют радиус-вектором подеры эллипса погрешностей вдоль названной нормали. Радиус-вектор подеры эллипса может будет рассчитан следующим путем используя формулу:
![]()
где a и b – большая и малая полуоси эллипса погрешностей; - угол между полуосью и линией пути судна.
Значения a,b и определяют, используя Приложение 5 в МТ – 75.
mлп1 = 0,0134; mлп2= 0,011, следовательно λ = 1,218.
Из приложения 5 МТ-75 мы видим, что для угла пересечения изолиний в 068 градусов и из отношения средних квадратических ошибок линий положений:
A = 1,38;
B = 0,92;
Ψ = 22;
Из этого следует, что dмc равняется 1,198 кбт
Значение dпо характеризует погрешность, с которой известно положение опасности (опасной изобаты). Погрешность положения опасной изобаты обусловлена погрешностью планового положения изобат (глубин) по нормали к линии пути судна. Эта погрешность отражает точность гидрографических и картографических работ, а также деформацию морских карт под влиянием температуры и влажности, и оценивается для тиражного оттиска карт среднеквадратической величиной 1 мм в масштабе карты. Следовательно
![]()
где С – знаменатель масштаба навигационной карты.
dпо = 511000/(1000*185,2)=C кбт (при масштабе карты 1:510000)
Далее находят нормированное (по величине mD) расстояние до опасности по нормали к линии пути и находят их соотношение
![]() .
.
Как уже описывалось выше: ‘’погрешность mD зависит от погрешности места судна dмс и погрешности положения опасности dпо’’, и из этого следует:
![]()
mD2 = 1,1982 + 0,272 = 2,27
Благодаря уже найденной величине mD кратчайшему расстоянию до опасности можно найти нормированное расстояние до опасности.
В расчетах рекомендуется использовать функцию распределения по Лапласу, которая представлена в форме таблицы 2.5.
Таблица 2.5 – Распределение вероятностей по Лапласу.
|
y |
0,55 |
0,68 |
0,75 |
0,88 |
0,95 |
|
Ф(y) |
0,2088 |
0,2517 |
0,2734 |
0,3106 |
0,3289 |
По полученному значению увыборкой из таблицы 2.5 необходимо получить искомую вероятность Р = Ф(у), характеризующую надежность навигации.
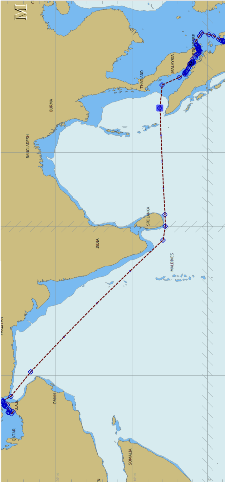
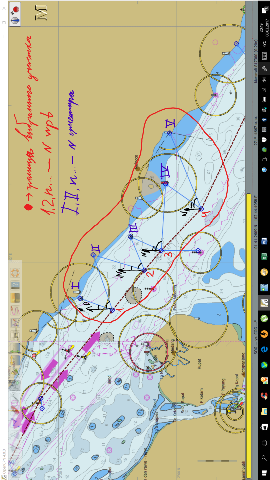
Графический план перехода