

Вопрос№12. Параметр обратной связи Vcв и как он реализуется в релейно – импульсном пи – регуляторе
Нелинейность обратной связи заключается в следующем: При включении релейного элемента динамика сигнала определяется дифференциальным уравнением
 , (1.4)
, (1.4)
а при отключении
 .
(1.5)
.
(1.5)
Здесь Т1, Т2-постоянные времени нелинейного апериодического звена, а К коэффициент передачи. Устройство инерционной обратной связи в промышленных аналоговых регуляторах выполняется в виде электрической RС-цепочки (рис.1.5).
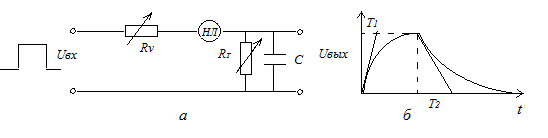
Рис. 1.5. Устройство обратной связи.
С-конденсатор; Rv- переменное сопротивление определяющее зарядку конденсатора; Rт- переменное сопротивление определяющее разрядку конденсатора; НЛ – неоновая лампа.
На
рис.1.5 показана реакция обратной связи
на импульсный входной сигнал. При
срабатывании РЭ
на вход RС
– цепочки подается напряжение Uвх,
так как Uвх
больше
порогового напряжения срабатывания
НЛ,
начинается
процесс зарядки конденсатора Участок
кривой нарастания сигнала обратной
связи Uвых
можно
охарактеризовать скоростью связи
 .
При отключении РЭ неоновая лампа
отключает цепь заряда конденсатора и
разряд конденсатора происходит через
переменное сопротивлениеRТ
с
постоянной времени Т2.
.
При отключении РЭ неоновая лампа
отключает цепь заряда конденсатора и
разряд конденсатора происходит через
переменное сопротивлениеRТ
с
постоянной времени Т2.
Вопрос№13. Этапы развития тса
Процесс совершенствования ТСА протекает под влиянием двух факторов: требования предприятий-потребителей ТСА, с одной стороны, и возможности предприятий-изготовителей, - с другой. Побудительной причиной замены существующих СА на новые для производственников служит повышение эффективности производства при условии быстрой окупаемости затрат. Поэтому разрабатывать необходимо те СА которые дадут больший экономический эффект с учетом затрат на разработку, изготовление и внедрение.
С другой стороны без широкой практической эксплуатации новых ТСА невозможно дать объективную оценку экономической эффективности их применения, отбросить неудачные с экономической точки зрения решения, сохранить лучшие варианты схем и конструкций. Таким образом, постоянное обновление технических средств автоматизации - это необходимое условие технического прогресса во всех отраслях промышленности.
Развитие ТСА прошло три этапа: начальный этап, этап комплексной автоматизации и механизации и этап АСУ.
Первый этап развития тса.
Для начального этапа создания средств механизации и автоматизации технологических процессов характерны низкая производительность труда, избыток дешевой рабочей силы, небольшие мощности агрегатов и установок. Поэтому человек участвовал во всех этапах управления производством достаточно широко. Наблюдение за ходом технологического процесса, принятие решений и их осуществление требовало как физического, так и умственно труда человека. Механизировались и автоматизировались отдельные операции и процессы, управление которыми силами человека надежно осуществить было невозможно. Автоматизация управления направлялась на стабилизацию параметров повышенной опасности (частота вращения паровых турбин, давление пара в котле, уровень воды). Так как применение автоматизации на первом этапе не носило массовый характер, объем ТСА был мал, то и не существовало отдельной отрасли их производства.
Значение первого этапа состоит в том, что в это время были сформулированы основные принципы построения низших уровней автоматизации, такие как основы современного дистанционного управления с использованием электро-пневмо-гидродвигателей для привода запорно-регулирующей арматуры, переход от регуляторов прямого действия к регуляторам косвенного действия.
Схема регулирования на первом этапе автоматизации компоновалась из отдельных элементов в конструктивно едином устройстве - регуляторе.
Такой метод компоновки ТС регулирования используется и сейчас на объектах и технологических процессах с относительно простыми задачами управления. До сих пор в таких задачах применяются иногда и регуляторы прямого действия.