

Вопрос№5. Исполнительный механизм типа мэо.
В серию ИМ типа МЭО входят следующие модификации:

МЭО-1,6/40;
МЭО-4/100;
МЭО-4/40;
МЭО-10/100;
МЭО-10/250;
МЭО-160/100;
МЭО-160/250
Назначение ИМ типа МЭО – управление РО в бесконтактных и контактных системах автоматического регулирования и дистанционного управления по сигналам командного устройства. В механизмах серии МЭО входной электрический сигнал (на входе механизма) преобразуется при помощи асинхронного электродвигателя с малоинерционным ротором и редуктора во вращательное движение постоянной скорости (на выходе механизма). Положение выходного вала определяется бесконтактными датчиками ОС.
Управление ИМ серии МЭО осуществляется: на бесконтактных элементах с помощью магнитных усилителей и контактное – при помощи реверсивных контактных пусковых устройств.
ИМ МЭО-1,6/40 и МЭО-4/100. Принцип действия:
Электродвигатель приводит в действие редуктор, являющийся основным узлом, на котором смонтированы все элементы ИМ. Для осуществления (в случае необходимости) ручного управления ИМ предусмотрен ручной привод. Электромагнитный тормоз обеспечивает необходимое торможение системы в процессе регулирования конечного звена управляемого объекта.
В ИМ имеются также блок датчиков, узел упоров, рычаг, штуцерный ввод, конденсатор, штепсельный разъем.
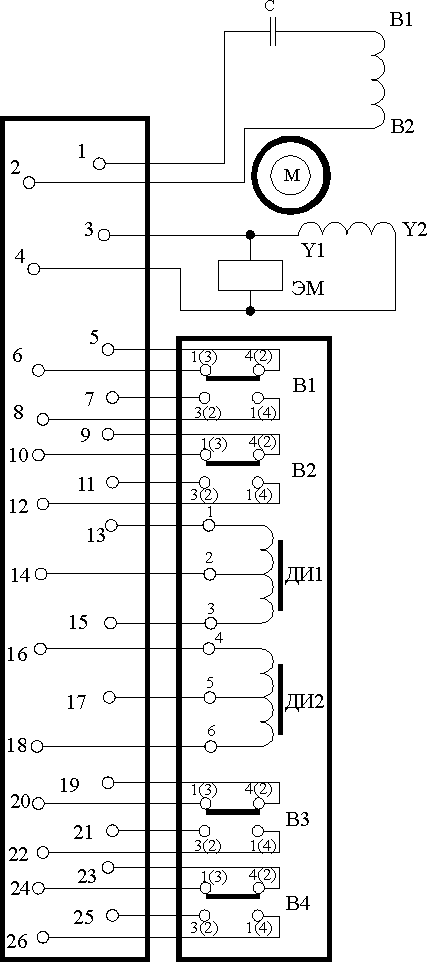
Кинематическая схема ИМ МЭО-1,6/40 и МЭО-4/100.

Для привода ИМ используют малоинерционные 2х – разные АД типа ДАУ-4. За счет малого отношения диаметра к длине короткозамкнутый ротор электродвигателя имеет уменьшенный момент инерции и обладает хорошими динамическими качествами, что обеспечивает его длительную работу в стопорном режиме. Реверсирование электродвигателя осуществляется переключением обмоток управления. Электромагнитный тормоз, предназначен для уменьшения выбега и фиксации выходного вала в любом положении после исчезновения управляющего сигнала. Тормоз состоит из электромагнита, рычагов тормозной колодки и регулировочных гаек для настройки пружин и зазора между тормозной колодкой и шкивом.
Для осуществления ОС и дистанционного указания положения выходного вала служат следующие узлы:
Блок БДИ-6, состоит из 2х индуктивных датчиков, 4х микропереключателей Д713, кулачков, рычагов, элементов настройки.
Этот блок применяется в схемах с бесконтактными регулирующими приборами, а также с указателем положения типа ДУП-Б.
Блок БДИ-6Л (аналогичен БДИ-6) предназначен для перемещения на плунжер одного из датчиков через люфтовое устройство. Этот блок применяется при работе с 2 ИМ и указателем положения ДУП-Б.
Блок БДР состоит из 2х реостатных датчиков (по 1200 Ом) и 4х микропереключателей. Применяется в схемах с автоматическими регуляторами, а также с указателем положения.
Для осуществления в ИМ обратной связи (между конечным и начальным звеньями) применяют датчики перемещения типа ДИ-1. Для подсоединения ИМ к электрической сети на корпусе редуктора установлен штепсельный разъем и штуцер, обеспечивающие герметичность ввода, а также создающие возможность проводить монтаж медным проводом.
Для ограничения предельных положений выходного вала ИМ и предохранения от поломок РО в механизме предусмотрены специальные упоры, снабженные упругими демпферами.