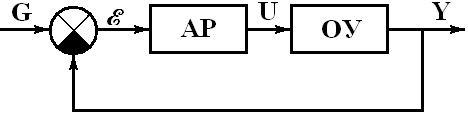
Вопрос№1. Обобщенная техническая структура типовой аср (автоматической системы регулирования)
Автоматическое регулирование - это одна из основных управляющих функций АСУТП.
Для технической реализации типовой АСР к объекту регулирования необходимо подключить комплекс технических средств, называемый регулятором. Регулятор позволяет реализовать заданный алгоритм управления. Чаще всего АР - это стабилизация технологического параметра на заданном уровне, компенсация отклонений регулируемой величины от заданного значения, возникающих вследствие действия различных возмущений.
Структурная схема одноконтурной аср
Автоматические регуляторы классифицируются:
по назначению: температуры, давления, влажности;
по дополнительному источнику энергии: прямого и косвенного действия;
по виду дополнительного источника энергии: электрические, пневматические, гидравлические и комбинированные;
по форме выходного сигнала: непрерывные, дискретные и цифровые;
по закону регулирования: П-; И-; ПИ-; ПД-; ПИД- и позиционные.
Входной величиной регулятора является отклонение регулируемой величины от заданного значения ε.
Выходной величиной АР является регулирующее воздействие U.
Основные требования к измерительной, управляющей и исполнительной частям АСР.
В локальных САР также можно выделить измерительную часть, информационно-управляющую и исполнительную.
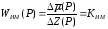
Измерительная часть состоит из первичных измерительных преобразователей (ПИП) и вторичных преобразователей. ПИП преобразуют параметр ТОУ в изменение энергетического потенциала сигнала-носителя информации. Вторичные ИП служат для согласования выхода датчика со входами управляющей части локальной САР. Например: усилители, делители, нормирующие преобразователи. Изменяют вид энергии сигнала носителя (из пневматического в электрический) и вид сигнала (аналог-цифра).
Управляющая часть может состоять из одного или нескольких блоков, реализующих требуемый алгоритм регулирования. В типовые алгоритмы чаще всего входят операции статического и динамического преобразования информации (усиление, алгебраическое суммирование, интегрирование, дифференцирование, нелинейное и логическое преобразование).
В состав исполнительной части типовой локальной САР обычно входят ИМ и согласующие устройства (усилители мощности, пускатели).
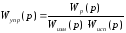
Динамика регулятора определяется алгоритмом управления с одной стороны и технической структурой измерительной и исполнительной части с другой.
 ,
,
следовательно
Для удобства эксплуатации к АР предъявляют дополнительные требования:
безударное переключение при переходе с ДУ на автоматическое; или с внешнего задающего устройства на внутреннее;
ограничение командного аналогового сигнала по верхнему и нижнему уровням и сигнализация об этом;
гальваническое разделение входных и выходных цепей АР;
автоматическое изменение параметров настройки АР для реализации адаптивного регулирования.
Вопрос№2,15. Динамические характеристики исполнительного механизма постоянной скорости
Исполнительный
мембранный механизм может быть представлен
как звено с нелинейной статической
характеристикой (рис.7, а). Его характеристика
находится в прямой зависимости от
площади мембраны и в обратной – от
коэффициента жесткости пружины
(возрастающей по мере ее сжатия).
Соответственно, при малых изменениях
 динамическую характеристику мембранного
исполнительного механизма можно
представить пропорциональным звеном
динамическую характеристику мембранного
исполнительного механизма можно
представить пропорциональным звеном
 , (1)
, (1)
причем
коэффициент передачи
 несколько
убывает с ростом
несколько
убывает с ростом
 .
.
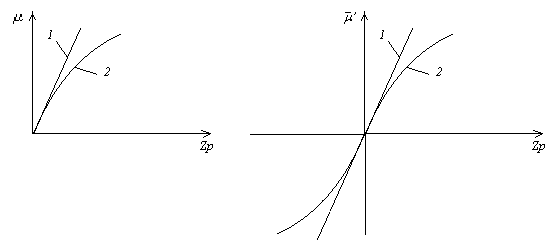
а б
Рис.7. Статические характеристики мембранного (а)
и гидравлического (б) исполнительных механизмов:
1 – идеальная; 2 – реальная
Гидравлический исполнительный механизм может рассматриваться как звено с нелинейной статической характеристикой (рис.7, б). Это связано с возрастанием постоянной интегрирования реального исполнительного механизма при больших скоростях перемещения поршня (за счет резкого увеличения сил вязкого трения).
Динамика гидравлического исполнительного механизма при малых входных воздействиях может быть представлена линейным интегрирующим звеном
 .
(2)
.
(2)
Исполнительный механизм постоянной скорости может находиться только в трех установившихся состояниях: вращение ротора с постоянной скоростью S, неподвижность, вращение с той же скоростью в противоположную сторону. Статическая характеристика исполнительного механизма постоянной скорости представлена на рис.8.
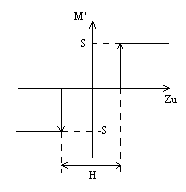
Рис.8. Статическая характеристика исполнительного механизма
постоянной скорости
При превышении сигнала управления Zu половины зоны нечувствительности H/2 происходит включение электродвигателя, который начинает перемещать с постоянной скоростью S вал исполнительного механизма.
Пусть на вход исполнительного механизма постоянной скорости поступает импульсный управляющий сигнал (рис.9, а) с амплитудой (0, А), при этом носителем информации является скважность импульсов , поступающих с периодом Т=tи+tп:
 , (3)
, (3)
где tи – время импульса; tп – время паузы.
Тогда
реакция исполнительного механизма
постоянной скорости на импульсное
воздействие будет иметь вид, представленный
на рис.9, б. Можно записать следующее
равенство:
 ,
, ,
тогда средняя скорость движения
,
тогда средняя скорость движения будет связана со скважностью следующим
соотношением:
будет связана со скважностью следующим
соотношением:
 . (4)
. (4)
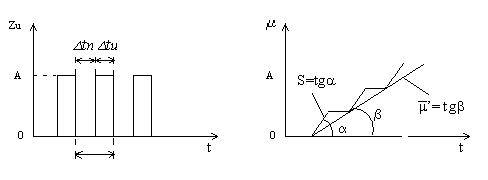
а б
Рис.9. Динамическая характеристика исполнительного механизма постоянной скорости
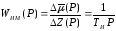
Таким образом, по отношению к скважности импульсного сигнала исполнительный механизм постоянной скорости ведет себя в среднем как интегрирующее звено, и его передаточную функцию можно представить в следующем виде:
 . (5)
. (5)
Если принять перемещение исполнительного механизма от 0 до 1, тогда скорость запишется как
 , (6)
, (6)
Тм – время полного хода ИМ, с.
Тогда передаточная функция ИМ примет следующий вид