

1.2. Компенсационный метод измерения
Все рассмотренные ранее приборы электромеханической группы являются приборами непосредственной оценки и потребляют мощность из измерительной цепи, что приводит к методическим погрешностям. Для сведения к минимуму влияния измерительного прибора на процесс измерения используется компенсационный метод измерения.
Компенсаторы – приборы, в которых измерение производится нулевым методом, метод сравнения с мерой, в котором результирующий эффект воздействия на прибор сравнения доводят до нуля.
Существуют компенсаторы переменного и постоянного тока. Компенсационный метод измерения широко используется в цифровых измерительных приборах.
Упрощенная схема компенсатора постоянного тока для измерения напряжения Uх показана на рис.1.1.

Рис. 1.1 Схема нулевого (компенсационного) метода измерения напряжения
В этой схеме вольтметр Vо служит для измерения разностного напряжения U между измеряемым Uх и известным компенсационным напряжением Uк, то есть выполняет функции прибора сравнения. Вольтметр V1 используется для регистрации напряжения Uк. После уравновешивания схемы резистором R1 до достижения U ≈ 0, измеряемое напряжение Uх определяется как
Uх= Uк+U , т.е Uх= Uк (1.1)
Если внутреннее сопротивление вольтметра V1 достаточно велико и можно считать что, потенциометр R1 не шунтирует Ех, то можно записать
Ех= Uк+U (1.2)
Схема нулевого метода измерения тока показана на рис.1.2.

Рис. 1.2. Схема нулевого метода измерения тока
В схеме осуществляется
компенсация измеряемого тока
![]() компенсирующим током
компенсирующим током![]() ,
который создается опорным источником
ЭДС
,
который создается опорным источником
ЭДС![]() .
Индикатором компенсации тока (прибором
сравнения) служит вольтметрVo.
Значение измеряемого тока
.
Индикатором компенсации тока (прибором
сравнения) служит вольтметрVo.
Значение измеряемого тока
![]() после уравновешивания схемы резисторомR1
до достижения показания вольтметра,
близкого к нулю UV
≈ 0
после уравновешивания схемы резисторомR1
до достижения показания вольтметра,
близкого к нулю UV
≈ 0
![]() ,
определяют по показаниям амперметра
,
определяют по показаниям амперметра![]() :
:
 (1.3)
(1.3)
где Rv – внутреннее сопротивлении вольтметра
1.3. Мостовой метод измерения параметров элементов
Очень широкое распространение при измерении параметров элементов цепей получили приборы, в которых применяются мостовые методы измерений.
Мостовые схемы обладают высокой чувствительностью, большой точностью, широким диапазоном измеряемых величин. Подобные схемы дают возможность создать приборы, предназначенные как для измерения одной какой-либо величины, так и универсальные приборы, измеряющие многие параметры электрических цепей. Такие приборы используют и ручное уравновешивание (например, универсальный мост типа Е7-11) и автоматическое с цифровым отсчётом (Е7-12).
Для измерения сопротивлений применяются как мосты постоянного тока, так и мосты переменного тока, а для измерения ёмкости и индуктивности только мосты переменного тока.
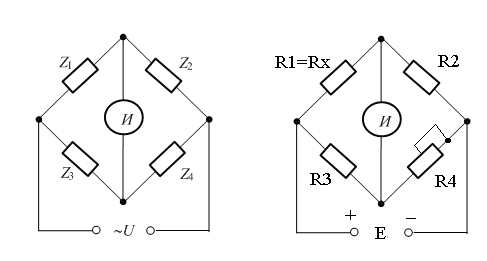
В самом общем
случае мостовая схема (рис. 1.3а) может
быть представлена в виде 4-х последовательно
включённых комплексных сопротивлений
–
![]() ,
,![]() ,
,![]() и
и![]() ,
которые образуют четырёхполюсник, к
двум зажимам которого подключается
источник питания (это диагональ питания),
а к двум другим – индикатор равновесия
(это диагональ измерения). Ветви,
включающие в себя эти сопротивления,
называются плечами моста. Мост приведенный
на рис. 1.3а называется одинарный
четырехплечный мост.
,
которые образуют четырёхполюсник, к
двум зажимам которого подключается
источник питания (это диагональ питания),
а к двум другим – индикатор равновесия
(это диагональ измерения). Ветви,
включающие в себя эти сопротивления,
называются плечами моста. Мост приведенный
на рис. 1.3а называется одинарный
четырехплечный мост.
Мост считается в равновесии когда напряжение на измерительной диагонали равно нулю Uи=0.
Условие равновесия моста записываются в комплексной форме, как равенство произведений сопротивлений противоположных плеч.
![]() (1.4)
(1.4)
Условия равновесия моста определяются двумя уравнениями:
![]() .
(1.5)
.
(1.5)
φ1+φ2 = φ3 +φ4
Если в одном плече
моста включено неизвестное сопротивление
(например,
![]() ),
то можно
записать выражение
),
то можно
записать выражение
![]() . (1.6)
. (1.6)
а) б)
Рис. 1.3. Схема одинарного четырёхплечего моста
В качестве индикатора равновесия используются магнитоэлектрические приборы (в мостах постоянного, непосредственно, и переменного, с детектором, тока) и осциллографические индикаторы (в мостах переменного тока).
Мосты постоянного тока. Они применяются для измерения величины активных (резистивных) сопротивлений. В таком мосте комплексные сопротивления можно заменить активными сопротивлениями R1, R2, R3 и R4 соответственно (рис.1.3б). Условие равновесия моста в этом случае примет вид
![]() . (1.7)
. (1.7)
При включении
измеряемого сопротивления
![]() в первое плечо моста, его величина
определяется выражением
в первое плечо моста, его величина
определяется выражением
![]() . (1.8)
. (1.8)
Это выражение называется рабочей формулой моста.
Таким образом, неизвестное сопротивление определяется методом сравнения с образцовыми сопротивлениями R2, R3 и R4, из которых одно или несколько должны быть переменными.
Плечо R2 называется плечом сравнения, а отношение сопротивлений плеч R3/R4 называется плечами отношений. Это означает, что в качестве регулятора уравновешивания моста используют резистор R2, отградуированный в значениях сопротивления, а отношение R3/R4 используется как множитель.
Обычно применяются уравновешенные мосты, при этом измеряемая величина определяется при значении тока измерительной диагонали Iи= 0.
Погрешность измерения сопротивления зависит от подбора отношения R3/R4 и точности градуировки R2.
Одинарные четырёхплечевые мосты применяются для измерения сопротивлений величиной от десятков Ом до единиц МОм. При измерении малых сопротивлений возникают погрешности, обусловленные сопротивлениями соединительных проводов и переходными сопротивлениями контактов, а при больших – сопротивления утечки.
Мосты
переменного тока. Для
измерения ёмкости, индуктивности,
тангенса диэлектрических потерь
![]() и добротности элементов
и добротности элементов![]() используются мосты переменного тока.
Наиболее часто применяются одинарные
четырёхплечие мосты, условие равновесия
которых было приведено выше (1.4).
используются мосты переменного тока.
Наиболее часто применяются одинарные
четырёхплечие мосты, условие равновесия
которых было приведено выше (1.4).
Сопротивления плеч представляют собой комплексные сопротивления
![]() , (1.7)
, (1.7)
где
![]() ,
a
,
a
![]() .
.
Учитывая это можно записать уравнение равновесия моста
![]() . (1.8)
. (1.8)
Это равенство разделяется на два, которые должны выполняться одновременно
![]() и
и
![]() .
.
Таким образом, равновесие моста достигается при равенстве произведений модулей и равенстве сумм аргументов плеч (то есть их фазовых углов) сопротивлений плеч.
Если сопротивления
трёх плеч моста известны, то легко найти
сопротивление четвёртого плеча моста.
В большинстве мостов переменного тока
два плеча представляют собой образцовые
резисторы. А два остальные – комплексные
сопротивления, одно из которых образцовое.
По месту расположения неизвестного
![]() и образцового
и образцового![]() сопротивлений мосты делятся на две
группы – мосты отношения плеч и мосты
произведения плеч:
сопротивлений мосты делятся на две
группы – мосты отношения плеч и мосты
произведения плеч:
1. Если
![]() и
и![]() расположены
в смежных плечах, то условие равновесия
моста будет иметь вид
расположены
в смежных плечах, то условие равновесия
моста будет иметь вид
![]() ,
или
,
или
![]() .
.
Такой мост носит название моста отношения плеч.
2. Если же
![]() и
и![]() расположены
в противоположных плечах, то условие
равновесия моста будет иметь вид
расположены
в противоположных плечах, то условие
равновесия моста будет иметь вид
![]() ,
отсюда
,
отсюда
![]() .
.
Такой мост называется мостом произведения плеч.
Из этих выражений
видно, что в мостах отношения плеч
реактивные составляющие
![]() и Z0
должны
иметь одинаковый знак, то есть это либо
две индуктивности, либо две ёмкости. В
мостах же произведения плеч
и Z0
должны
иметь одинаковый знак, то есть это либо
две индуктивности, либо две ёмкости. В
мостах же произведения плеч
![]() и Z0
должны
иметь противоположные знаки, то есть
если
и Z0
должны
иметь противоположные знаки, то есть
если
![]() ёмкость,
то Z0
– индуктивность
и наоборот.
ёмкость,
то Z0
– индуктивность
и наоборот.

Рис. 1.5. Схема моста для измерения параметров конденсаторов
Следовательно, схема моста для измерения параметров ёмкостей будет иметь вид, приведённый на рис. 1.5 (в случае применения эталонной ёмкости Со).
Условие равновесия моста будет иметь вид
![]()
или
![]() .
.
Приравняв отдельно вещественные и мнимые слагаемые, получим два условия равновесия
![]() ,
или
,
или
![]() ,
,
![]() ,
,
![]() .
.
Тангенс угла потерь для конденсаторов с последовательной схемой замещения определяется следующим выражением
![]() .
.
Для параллельной схемы замещения
![]() .
.

Рис. 4.6. Схема моста для измерения параметров индуктивностей
Мост для измерения
параметров индуктивностей (рис. 4.6)
содержит переменный конденсатор
![]() ,
с помощью которого достигается его
уравновешивание. Условия равновесия
моста:
,
с помощью которого достигается его
уравновешивание. Условия равновесия
моста:
![]() .
.
Отсюда
![]() R0
+ jw
R0
+ jw![]() R0
= R2R3
+
jwC0R0R2R3.
R0
= R2R3
+
jwC0R0R2R3.
В результате преобразований получим:
Lx
= C0R2R3;
![]() = R2R3/R0
;
= R2R3/R0
;
![]() =
wLx/
=
wLx/![]() = wR0C0.
= wR0C0.
Параллельное соединение R0 и C0 в эталонном плече мостовой схеме для измерения параметров индуктивностей используется для измерения параметров катушек с низкой добротностью (Q< 30). Для катушек с высокой добротностью (Q > 30) используется последовательное соединение R0 и C0 в эталонном плече.