

4 раздел Векторное управление
.pdfRокп ( p) |
1 |
. |
|
|
|||
8T ,1K2 p(4T ,1K2 p+1) |
|||
|
|
Откуда оператор замкнутого оптимизированного канала стабилизации потокосцепления принимает вид:
W ( p) |
Rокп ( p) / kп |
|
1/kп |
|
|
1/ kп |
|
. (4.84) |
|
|
|
|
|||||||
окп |
1 |
Rокп ( p) |
32T 2 ,1K 22 p2 +8T ,1K2 p+1 |
|
8T ,1K2 p 1 |
|
|||
|
|
|
|||||||
Таким образом, операторы внешних реальных контуров фазных токов статора и канала потокосцепления ротора полностью определены.
4.5.2.4 Синтез операторов канала программного управления
скоростью АД
Программный канал управления скоростью АД может быть выполнен как
с П-, так и с ПИ-регулятором скорости (ПИ-РС).
Предположим, что в САУ ЭП недопустимо наличие статической ошибки по скорости. Тогда канал управления скоростью должен быть настроен на СО, а
в качестве регулятора скорости выбран ПИ-РС. В этом случае коэффициент усиления kрс пропорциональной составляющей ПИ-РС с учетом объекта управления канала, определяемого оператором (4.82) при i 2 и структурой АД на рис.4.6, принимает вид:
|
|
|
|
|
|
|
kрс |
|
2J kтkп |
|
J kтkп |
, |
(4.85) |
|
8T ,2K2 z p Kr kc |
12T ,2K2 z p Kr kc |
||||
3 |
|
|
|
|||

где 4T ,2K2 – малая некомпенсируемая постоянная времени контура
регулирования скорости АД.
На основании соотношений (4.82) и (4.85) оператор ПИ-регулятора
скорости определяется выражением
|
16T |
K |
2 |
p 1 |
|
|
|
|
||
Kрс ( p) |
,2 |
|
|
|
|
J kтkп |
, |
(4.86) |
||
16T ,2K2 p |
12T ,2K2 z p Kr kc |
|||||||||
|
|
|
|
|||||||
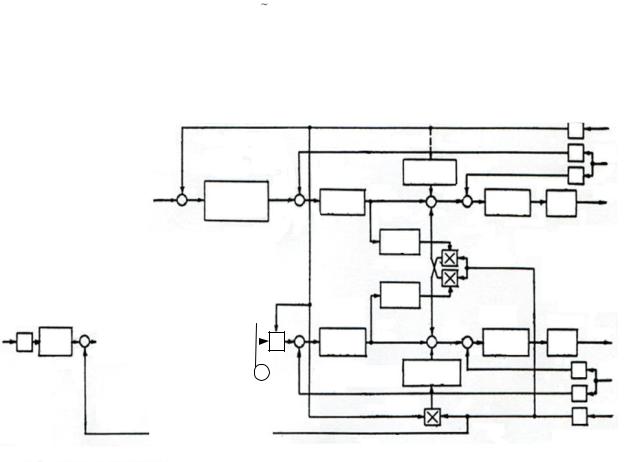
а структура канала управления скоростью АД принимает вид, показанный на рис. 4.12.
Регулятор скорости подключен к контуру регулирования активной
составляющей тока статора через делительное устройство. Благодаря этому
осуществляется автоматическая перенастройка коэффициента передачи канала управления скоростью при изменениях потокосцепления r r,1. При этом в оператор ПИ-РС (4.86) введен коэффициент датчика потокосцепления kп ,
компенсирующий последующее деление на kп (см. рис. 4.12).
Ограничение момента АД обеспечивается ограничением выхода регулятора скорости с помощью БОМ. Сигнал задания скорости формируется
из сигнала задатчиком интенсивности ЗИ и сглаживающим фильтром Ф (в
м
случае ПИ-РС) с оператором
KФ ( p) |
1 |
|
. |
|
|
|
|||
16T ,2K2 p+1 |
||||
|
|
|||
Из рис. 4.12 находим ЛДО разомкнутого оптимизированного канала управления скоростью с единичной ООС:

Rокс ( p) |
16T,2K2 p 1 |
|
|
. |
||
128T 2 |
K 2 |
p2 (4T K |
|
|
||
|
2 |
p 1) |
||||
|
,2 |
2 |
,2 |
|
|
|
Откуда ЛДО замкнутого оптимизированного канала управления скоростью принимает вид:
|
|
W |
|
( p) Rокc ( p) / kc |
|
|
|
|
|
|||||
|
|
окc |
|
1 |
Rокc ( p) |
|
|
|
|
(4.87) |
||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
(16T,2K2 p 1)/kc |
|
|
|
|||||||
|
|
|
|
|
|
|
|
. |
||||||
512T 3 |
K 3 |
p3 +128T |
2 |
K 2 |
p2 |
|
|
|
|
|||||
|
+16T |
K |
2 |
p+1 |
||||||||||
|
,2 |
2 |
|
|
|
,2 |
2 |
|
|
,2 |
|
|
|
|
Таким образом, операторы ПИ-регулятора скорости и канала управления скоростью АД полностью синтезированы.
БОМ
Uогр
|
|
|
|
|
|
|
|
|
|
–Uогр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kп r,1 |
|
|
|
r,1 |
|
|||
|
|
Ф |
|
|
|
ПИ – РС |
М* i*s,2 |
Wокт,2 |
is,2 МЧД |
м |
|||||||||
*м |
ЗИ |
1 |
|
|
16T ,2K2p 1 |
|
J kтkп |
: |
1 / kт |
|
3z pKr |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2J p |
|
|
|||
|
|
|
|
|
16T |
,2K2p |
|
12T ,2K2z pKr kc |
4T |
K |
p 1 |
|
|
||||||
|
16T |
K |
p 1 |
|
|
||||||||||||||
|
|
,2 |
2 |
|
|
|
|
|
|
|
|
,2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДС |
|
|
|
|
|
|
|
|
|
|
|
|
|
Uс |
|
|
|
|
|
kс |
|
|
|
|
|
|
|
|
Рисунок 4.12 − Структурная схема канала управления скоростью АД с перенастройкой коэффициента передачи канала при изменениях опорного
вектора r
4.5.3 Структурная схема управляющей части САУ асинхронного ЭП
типа НПЧ-АД с учетом компенсирующих связей
Сигналы, компенсирующие внутренние перекрестные обратные связи
(ВПОС) объекта управления (АД), вводятся на входе П-регуляторов внутренних «фиктивных» контуров регулирования составляющих фазных токов статора. При этом в работе [4] на примере результатов экспериментальных исследований реальной САУ скоростью АД с КЗ ротором типа 4АН315М4 показано, что перекрестные связи, вносимые НПЧ и характеризующие взаимосвязь контуров регулирования фазных токов в системе отсчета 1-2 (см. рис. 4.6) можно не компенсировать, так как их действие в рабочем диапазоне выходных частот НПЧ проявляется слабо. Остальные компенсирующие связи могут быть сформированы упрощенно, т.е. по
измеренному сигналу z p м (а не по c ) и по выходным сигналам is**,1 и
is**,2 соответствующих И-регуляторов тока (И-РТ1 и И-РТ2) (см. рис. 4.10),
имеющим лучший гармонический состав, чем при непосредственном измерении значений регулируемых величин is,1 и is,2 .
Из рис. 4.6 следует, что ВПОС двухфазного АД, подлежащими компенсации, являются сигналы обратных связей, пропорциональные
величинам:
Kr r,1 |
|
|
Kr r,1z p м. |
|
|||
Tr |
; Lsis,2 c; |
Lsis,1 c; |
|
|
|
|
С учетом вышесказанного соответствующие упрощенные выражения для внутренних компенсирующих сигналов (ВКС) имеют вид:
|
k |
|
|
=2T |
|
z |
p |
i** |
; |
(4.88) |
|
|
вкс,i |
|
,2 |
|
м |
s,1 |
|
|
|||
|
|
s,1 |
|
|
|
|
|
|
|
||
k |
вкс,i |
|
= 2T |
z |
i** |
; |
(4.89) |
||||
|
|
|
,1 |
|
|
p |
м s,2 |
|
|
||
|
s,2 |
|
|
|
|
|
|
|
|
|
|
k |
= |
2T ,2Kr kт.ф z p м |
|
|
|
; |
(4.90) |
||||
|
|
r,1 |
|||||||||
вкс,E |
|
|
|
|
|
|
|
||||
|
|
|
|
Ls |
|
|
|
|
|
||
k |
|
|
= |
2T ,1Kr kт.ф |
|
|
|
; |
(4.91) |
||
|
|
|
r,1 |
||||||||
вкс, r,1 |
|
|
|
|
|
||||||
|
|
|
|
Tr Ls |
|
|
|
|
|
||
где м – механическая скорость ротора АД.
Структурная схема управляющей части САУ скорости АД при управлении с опорным вектором r , построенная на основании рис. 4.9÷4.12 и
с учетом компенсирующих сигналов вида (4.88)÷(4.91), приведена на рис.4.13.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r,1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Uп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kп |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
is,1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kт |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uт |
|
|
|
|
|
|
|
2T |
K K |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ПИ – РП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kт.ф |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,1 r т.ф |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
* |
|
|
|
1 pTr |
|
|
|
|
|
i* |
И – РТ1 |
** |
|
|
Tr LsKп |
|
|
П – РТФ1 |
НПЧ |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
r,1 |
|
|
|
|
|
|
|
s,1 |
K |
т.ф |
|
|
|
|
|
|
|
|
|
|
|
|
TsRs |
|
Kт.п |
|
|
s,1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
8T ,1LmK2Kп |
|
|
|
|
|
|
|
|
s,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
4T K K |
K |
p |
|
|
|
|
|
|
|
|
|
|
|
2T |
|
,1Kт.пKт.ф |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 pT |
,1 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,1 1 2 |
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Kт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
is,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2T ,2 zp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kc |
|
|
|
|
|
kc m |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kп r,1 |
|
|
|
|
|
|
2T ,1zp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
ПИ – РС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
* |
|
Ф |
|
|
|
|
|
|
|
|
|
|
* |
И – РТ2 |
i** |
|
|
i* |
|
|
П – РТФ2 |
|
НПЧ |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
1 |
|
1 |
p16T |
K |
2 |
|
|
J KтKп |
|
М* |
|
is,2 |
K |
т.ф |
|
|
|
|
|
|
|
|
Kт.п |
|
|
|
U |
s,2 |
|||||||||||||||||||
m |
ЗИ |
|
|
|
,2 |
|
|
|
|
|
|
|
: |
|
|
|
|
|
s,2 |
|
|
|
s,2 |
|
|
|
|
TsRs |
|
|
|
|
|
|
||||||||||||||
|
1+16T ,2K2 |
|
|
|
p16T ,2K2 |
|
|
|
|
|
|
|
|
4T ,2K1K2Kтp |
|
|
|
|
|
|
|
|
|
|
2T |
|
K K |
|
1 pT ,2 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
12T ,2K2zpKcKr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,2 т.п т.ф |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2T ,2zpKrKт.ф |
|
|
|
|
|
|
|
|
|
|
Kт.ф |
|
|
i |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
Uт |
|
|
|
|
|
|
|
|
LsKпKс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s,2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kп r,1 |
|
|
|
|
|
|
|
|
|
|
|
|
Kт |
|
|
m |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kс |
|
|
|
||||||||
|
|
|
|
|
|
Uс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рисунок 4.13 − Структурная схема управляющей части САУ скоростью АД с учетом компенсирующих обратных связей
Следует отметить, если значения постоянной времени ротора Tr Lr / Rr
достаточно велико, то компенсирующую связь (4.91) можно не вводить (см.

пунктирную линию на рис. 4.13), так как динамическое воздействие соответствующей связи объекта проявляется слабо. Поэтому главными ВКС являются связи (4.88)÷(4.90).
Кроме того, если требуется регулировать не скорость, а момент М двигателя (при пусках и торможениях АД), то задающим воздействием системы является сигнал M =const (см. точку А на рис. 4.13). В этом случае скорость ЭП не регулируется, а он отслеживает наброс или сброс нагрузки. Регулятор скорости практически не работает и может быть реализован как в виде П-РС,
так и в виде ПИ-РС.
4.5.4 Функциональная схема исполнительной части САУ
асинхронного ЭП типа НПЧ-АД
Функциональная схема исполнительной части САУ скоростью АД при управлении с опорным вектором r представлена на рис. 4.14. На рисунке силовая часть системы на основе фазных НПЧ, П-регуляторы фазных токов,
датчики переменных и преобразователи координат ПК2÷ПК4 для связи частей САУ, синтезируемых в разных системах отсчета (статора и вращающейся),
показаны в системе отсчета А–В–С, связанной со статором. Сигналы is*,1 и
is*,2 , поступающие на входы исполнительной схемы, являются выходными сигналами управляющей части САУ, синтезируемой в системе отсчета 1-2,
связанной с вектором потокосцепления ротора r .

|
|
r,1 |
|
|
|
|
|
ПК (П) |
i*А |
|
U |
A |
BI |
A |
i |
A |
|
*r,1 |
РП |
|
|
|
|
|
|
|
|
|
|
||||
|
|
is*,1 |
is**,1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
is*,1 |
is*, |
iB* |
|
|
|
|
|
|
АД |
|||||
|
|
|
|
|
|
|
UB BIB iB |
|||||||||
|
|
|
|
is,1 |
|
is*,2 |
i* |
|
|
|
|
|
|
|
BR |
|
|
|
|
|
|
|
|
|
s, |
iC* |
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
cos |
|
UC |
BIC |
iC |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
* |
** |
РС |
М* |
r,1 |
|
|
r,1 |
r, |
b, |
b,A |
|
|
|
|
|
|
Ф m |
|
|
|
|
|
|
|
|
|
|
|
|
||||
m |
ЗИ |
|
|
|
|
|
|
r, |
b, |
b,B |
|
|
|
|
|
|
|
|
|
is*,2 |
** |
|
|
|
|
|
|
|
|||||
|
|
|
|
is,2 |
is,1 |
is, |
is, |
iA |
|
|
|
|
|
|
||
|
|
|
|
is,2 |
|
is, |
|
|
|
|
|
|
|
|||
|
|
m |
|
|
m is,2 |
|
|
iB |
|
|
|
|
|
|
||
|
|
|
|
|
is, |
|
|
|
|
|
|
|
||||
ПК (О)
Рисунок 4.14 − Функциональная схема исполнительной части САУ скоростью АД при управлении с опорным вектором r
Анализу подлежит исполнительная часть системы, т.е. преобразователи координат ПК1÷ПК5 и решающие устройства РУ1 и РУ2.
Исполнительная часть САУ должна преобразовывать суммарные сигналы составляющих тока статора is*,1и is*,2 в задающие сигналы i*A , i*B и iC*
на входе соответствующих реальных П-регуляторов фазных токов статора РТФА, РТФВ и РТФС. Эти преобразования осуществляются с помощью координатных преобразователей ПК1, ПК2 и дополнительных функций sin , cos , получаемых после обработки сигналов датчиков магнитного потока
(потокосцепления) ВХ1 и ВХ2. Обратные преобразования физически измеренных величин потокосцепления â, À , â, и тока статора iA , iB
соответственно в сигналы r,1 и is,1, is,2 во вращающейся системе координат
1-2 реализуются с помощью преобразователей ПК3÷ПК5 и устройств РУ1, РУ2.
В ПК1 осуществляются прямые нелинейные преобразования в соответствии с формулами:
is*,α*is,β
is*,1 cos φ is*,2 sin φ;
(4.92)
is*,1 sin φ is*,2 cos φ,

которые несложно получить на основании векторной диаграммы АД,
приведенной на рис. 4.15.
2 |
* |
|
Is |
|
|
|
|
is, |
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
|
r |
1 |
|
is,2 |
|
|
|
|||
|
|
|
|
* |
|
|
|
|
|
is,1 |
|
|
|
|
|
|
|
|
||
|
* |
|
* |
* |
|
|
is,2 sin |
is, is,1 cos |
|
||||
Рисунок 4.15 − Векторная диаграмма АД, поясняющая работу преобразователя координат ПК1
На рис. 4.15 угол φ − это фазовый сдвиг между осью «α» неподвижной системы координат α-β статора и осью «1» вращающейся системы координат 1- 2.
Отметим, что одновременно преобразователь координат ПК1
компенсирует нелинейности АД в системе отсчета, связанной с опорным
вектором r .
В преобразователе координат ПК2 осуществляются прямые линейные преобразования в соответствии с зависимостями:

|
|
|
|
|
|
|
|
|
|
|
|
|
|
i*A is*,α ; |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
|
|
3 |
|
|
||
iB* |
is*,α cos( 60о ) is*,β cos(30о ) |
|
is*,α |
|
|
is*,β ; |
(4.93) |
||||||
2 |
2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
3 |
|
|
|
|
|
||
iC* |
is*,α cos 60о is*,β cos 30о |
is*,α |
is*,β , |
|
|||||||||
2 |
2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||
которые можно получить на основании векторной диаграммы АД, приведенной на рис. 4.16. По конструкции преобразователь ПК2 значительно проще чем ПК1.
Основные обратные преобразования координат осуществляются с помощью преобразователей ПК3 и ПК4.
Для точного определения величины потокосцепления ротора r в
асинхронной машине в воздушном зазоре между статором и ротором устанавливаются два датчика основного потокосцепления (датчики Холла) ВХ1
и ВХ2 под углом 120о друг к другу. Кроме того, в статорной цепи АД имеются три датчика фазных токов BI A , BIB и BIC , из которых показания двух датчиков BI A и BIB используются в преобразователе координат ПК4 (см. рис.
4.14).

B |
|
i* |
Is |
s, |
|
|
|
60 |
o |
|
i* |
|
|
|
|
|
|
C |
|
|
|
iB* |
30o |
|
|
|
|
|
|
120o |
60 |
o |
i* |
|
|
||
|
|
|
A |
|
|
||
|
|
60o |
* |
A |
|||
|
|
|
|
|
is, |
|
|
Рисунок 4.16 − Векторная диаграмма АД, поясняющая работу преобразователя координат ПК2
В преобразователях ПК3 и ПК4 соответственно действительные мгновенные значения в, А и в, B потокосцеплений от магнитного потока
воздушного зазора, измеренные с помощью датчиков Холла, и мгновенные
значения сигналов iA , iB от датчиков тока, размещенных в фазах АД,
преобразуются из трехфазной системы отсчета А–В–С в двухфазную прямоугольную систему отсчета статора α-β для последующих вычислений.
При этом ось «α» совмещается с магнитной осью статорной обмотки фазы А.
Указанные преобразования определяются следующими выражениями [13]:
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|||
в,α μ,α |
в, A; |
|||||||
2 |
||||||||
|
|
|
|
(4.94) |
||||
|
|
|
|
|
|
1 |
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|||
в,β μ,β |
2( |
|
в, A в,B ); |
|||||
2 |
||||||||
|
|
|
|
|
|
|
||