

4 раздел Векторное управление
.pdfрежиме идеального холостого хода со скоростью, также связанной с заданной ча-
стотой тока статора. Подобное состояние АД аналогично режиму идеального холостого хода ДПТ, когда при постоянном его возбуждении и Мс 0 якорная цепь ДПТ подключена к регулируемому источнику постоянного напряжения.
При увеличении нагрузки на валу АД система управления должна обеспечивать поворот вектора Is относительно вектора r таким образом, чтобы, вопервых,
составляющая Is1 оставалась неизменной, сохраняя постоянство потокосцепленияr1, а, во-вторых, составляющая увеличивалась до значения, при котором электромагнитный момент становился равным моменту сил сопротивления на валу АД и двигатель выходил бы на установившийся режим работы.
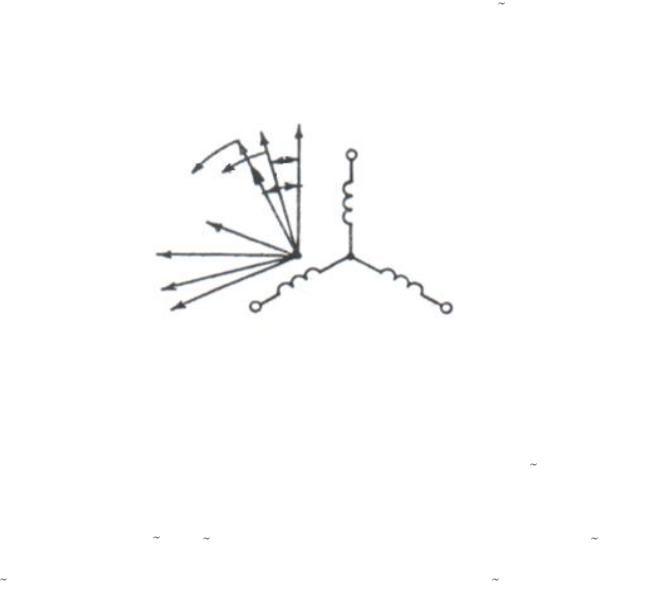
На векторной диаграмме рис. 4.4, б вектор Is по мере увеличения нагрузки скользит по линии 1, перпендикулярной вектору r . Результирующая составляющая токов статора и ротора по оси ”2” создает составляющую потокосцепления 2 . При этом конец вектора скользит по прямой 2, также перпендикулярной вектору r . Таким образом, при увеличении нагрузки двигателя и стабилизации r поток намагничивания машины также увеличивается, что необходимо учитывать при реализации системы управления приводом со стабилизацией потокосцепления ротора.
4.3.6 Определение электромагнитного момента трехфазного АД
Исходя из общего определения электромагнитной энергии обобщенной асинхронной машины (4.4), электромагнитный момент АД определяется в соответствии с (4.5).
В работе [4] показано, что электромагнитный момент М может быть определен как модуль векторного произведения обобщенных векторов токов

статора и ротора в системе координат 1-2, связанной с вектором тока ротора Ir
:
|
3 |
|
|
|
|
|
|
|
3 |
|
* |
|
|
|
|
|
|
|
|
|
|
||||
M |
|
z p Lm |
|
|
|
|
|
z p LmRe jIr I s |
||||
|
|
|
||||||||||
2 |
Ir xIs |
|
2 |
|||||||||
|
|
3 |
|
|
|
|
|
|
(4.47) |
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
z |
L (i |
|
i |
|
i i |
), |
|||
|
|
|
|
|
||||||||
|
|
|
2 |
|
|
p m r1 s2 |
|
r 2 s1 |
|
|||
где I s – сопряженный обобщенный вектор тока статора.
Из (4.47) следует, что электромагнитный момент, развиваемый АД, не
зависит от токов нулевой последовательности.
Если подставить в (4.47) выражения для векторов токов из (4.43), то можно получить другие, более удобные формулы для определения
электромагнитного момента [3]:
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
* |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
M |
|
|
|
z p Lm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z p Re j s I s |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
2 |
s xIs |
|
2 |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.48) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
z |
|
|
( |
i |
|
|
i |
|
); |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
p |
|
|
|
|
|
s1 s2 |
|
|
|
|
|
|
s2 s1 |
|
|
|
|||||||||||
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
* |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z p Kr Re j r I s |
|||||||||
M z p Kr |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
r xIs |
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
2 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
(4.49) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
z |
|
|
K |
|
|
( |
|
|
i |
|
|
|
|
|
i |
|
); |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
p |
|
|
|
r |
|
|
|
r1 s2 |
|
|
|
r 2 s1 |
|
||||||||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
* |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z p Ks Re jIr s |
|||||||||
M z p Ks |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Ir x s |
|
|
|
|
|
||||||||||||||||||||||||||||||||
2 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
(4.50) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
z |
|
|
K |
|
|
(i |
|
|
|
|
i |
|
|
|
), |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
p |
|
|
s |
|
r1 s2 |
|
|
|
|
r 2 |
|
s1 |
|
|
|||||||||||||
где с учетом ранее введенных обозначений (4.29) через Kr |
и Ks |
обозначены |
|||||||||||||||
коэффициенты электромагнитной связи соответственно ротора и статора: |
|||||||||||||||||
|
|
K |
r |
|
Lm |
, |
|
K |
s |
|
Lm |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
Lr |
|
|
|
Ls |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
L |
L |
L |
|
, |
L |
L |
|
L , |
L |
3 |
L |
. |
(4.51) |
||||
|
|
|
|||||||||||||||
r |
r,l |
m |
|
|
s |
s,l |
|
m |
m |
2 |
s,m |
|
|
||||
Уравнения (4.42), (4.43) и (4.47)÷(4.50) не содержат периодических коэффициентов при любом выбранном значении скорости c вращающейся системы координат 1-2.
В теории электрических машин обычно используется следующие системы координат: вращающаяся с синхронной скоростью c (система x-y);
вращающаяся со скоростью ротора (система d-q); неподвижная (система α-β).
Таким образом, полученные уравнения (4.42), (4.43) и (4.47)÷(4.51)
образуют двухфазную математическую модель трехфазного асинхронного двигателя в обобщенной векторной форме.
4.4 Структурные схемы двухфазного асинхронного двигателя с учетом электромагнитных процессов, представленных в обобщенной векторной форме
4.4.1 Необходимые понятия
Необходимость синтеза высококачественных асинхронных частотно-
управляемых ЭП накладывает дополнительные ограничения на выбор систем координат. В настоящее время разработаны сравнительно простые и удобные методы оптимизации переходных процессов для таких координат

электропривода, которые постоянны в установившемся режиме, т.е. не содержат периодических коэффициентов в соответствующих уравнениях динамики. В этом отношении системы координат α-β и d-q не могут быть использованы, так как в установившемся режиме частоты регулируемых координат отличны от нуля. И лишь система координат 1-2, вращающаяся с синхронной скоростью ωc, отвечает указанному требованию.
Дополнительные преимущества с точки зрения простоты представления объекта и синтеза регуляторов получаются при рациональном выборе угловой скорости и ориентации координатных осей в переходном режиме. Поскольку результирующие пространственные векторы токов Is , Ir , напряжений Us ,Ur
и потокосцеплений s , r статора и ротора в установившемся режиме взаимно неподвижны, если питающие напряжения синусоидальны, любая система координат, привязанная к одному из этих векторов (назовем его
«опорным»), пригодна для оптимизации [3].
Для получения шести основных структурных представлений АД, которые обозначаются по выбранному опорному вектору как структуры Us , Ur , Is , Ir
, s , r , исходными являются уравнения (4.42), (4.43) и (4.47)÷(4.50).
Применительно к каждому частному случаю ось "1" системы координат направлена по опорному вектору, а ось "2" − в опережающем ее на 90о
направлении, поэтому уравнения (4.42) и (4.47)÷ (4.50) упрощаются, так как проекция обобщенного опорного вектора на ось "2" равна нулю. При выходе уравнений АД в различных системах координат необходимо использовать те выражения электромагнитного момента (4.47)÷(4.50), которые позволяют получить простейшие структуры с минимальным количеством перекрестных связей и важнейших переменных, подлежащих регулированию.
4.4.2 Структурная схема АД в системе отсчета, ориентированной по
вектору потокосцепления ротора r
Отметим, что после синтеза структурной схемы АД во вращающейся системе координат 1 − для обеспечения управления АД необходимо перейти к структуре двухфазной обобщенной машины в координатах α-β и d-q, затем перейти к структуре трехфазной симметричной машины с управлением по фазам А, В, С.
Рассмотрим синтез структурной схемы АД в системе координат 1-2,
ориентированном по вектору потокосцепления ротора r (рис.4.5).
Воспользуемся уравнениями (4.42), (4.43), (4.49), (4.51).
|
|
d |
|
α |
|
1 |
|
|
|
|
|
|
|
|
ωс |
|
|
x |
a |
ω |
|
|
||
|
|
|
|
|
|
~ |
|
xc |
|
|
Ψr |
|
|
|
~ |
|
|
|
|
Is |
|
|
|
|
β
q
2 |
b |
c |
|
|
Рисунок 4.5 − Векторная диаграмма некоторых обобщенных переменных АД при ориентации системы координат 1-2 по вектору потокосцепления ротора
Поскольку при ориентации вектора потокосцепления ротора r по оси
"1" в системе управления АД представляет интерес определение зависимостей между переменными r и Is , исключим из уравнений (4.42) переменные s
и Ir . Тогда для пространственного вектора тока ротора Ir из второго уравнения системы (4.43) с учетом соотношений (4.51) находим:

I |
r |
r K |
r |
I |
s |
K |
r |
( r I |
s |
) . |
(4.52) |
|
L |
|
|
L |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
r |
|
|
|
|
|
m |
|
|
|
После подстановки (4.52) в первое уравнение (4.43) получаем
|
s |
K |
r |
(L K |
L |
)I |
s |
K |
r |
|
r |
L I |
s |
K |
r |
|
r |
, |
|
(4.53) |
||||||||
|
|
|
s |
|
r m |
|
|
|
|
s |
|
|
|
|
|
|
|
|||||||||||
В (4.53) с |
|
учетом |
(4.51) обозначено: |
L |
− индуктивность |
рассеяния |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
магнитного поля статора АД: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
L L L |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
L |
L K |
L |
L |
|
|
m r |
|
m |
|
L |
K |
|
L |
, |
(4.54) |
|||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||
s |
|
|
s |
|
|
r m |
|
s,l |
|
|
|
|
Lr |
|
|
|
|
|
s,l |
|
|
|
r r,l |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Или в обозначениях, принятых в работе [10],
|
|
|
|
|
L |
2 |
|
|
|
L |
L |
K |
L |
L (1 |
m |
|
) L |
, |
(4.54) |
|
|
||||||||
s |
s |
|
r m |
s |
|
|
s |
|
|
|
|
|
|
|
Ls Lr |
|
|
||
где σ − коэффициент рассеяния магнитного поля АД, (1 Lm2 ) .
Ls Lr
Подставив (4.53) в первое уравнение системы (4.42), получаем уравнение обобщенного вектора напряжения статора в операторной форме (при нулевых начальных условиях):
U |
s |
[R |
( p j |
)L |
]I |
s |
K |
( p j ) |
r |
, |
(4.55) |
|
s |
c |
s |
|
r |
c |
|
|
где p d / dt − оператор дифференцирования по времени t.

Подставив (4.52) во второе уравнение (4.42), имеем:
U |
r |
[ |
Kr Rr |
p j( )] |
r |
K R I |
s |
|
|
||||
|
|
||||||||||||
|
|
|
|
c |
|
|
|
r r |
|
|
|||
|
|
|
|
Lm |
|
|
|
|
|
|
, |
(4.56) |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||
[ |
p j( )] |
|
K R I |
|
|
|
|
||||||
|
r |
s |
|
|
|
||||||||
|
|
|
|
|
c |
r |
|
r |
|
|
|
||
|
|
Tr |
|
|
|
|
|
|
|
|
|||
где Tr − электромагнитная постоянная времени цепи ротора, Tr Lr / Rr .
Левую и правую части уравнения (4.56) умножим на коэффициент Kr и
результат вычтем из уравнения (4.55):
Us KrUr [Rs
[R ( p j ) s c
2 |
|
|
|
1 |
|
Kr |
|
|
|
) r |
|
|
|
|
|||
Rr ( p j c )Ls ]Is Kr ( j |
Tr |
||||
|
|
|
|
, (4.57) |
|
|
|
1 |
|
|
|
|
Kr ( j |
) r |
|
|
|
|
|
|
|||
|
|
|
|||
Ls ]Is |
Tr |
|
|
||
|
|
|
|
|
|
где |
|
− эквивалентное активное сопротивление цепи статора, |
|
Rs |
|||
|
|
2 |
|
Rs Kr Rr . |
|||
Rs |
|||
Разложим вектор (4.57) на действительную (ось "1") и мнимую (ось "2")
части.
|
KrUr,1 |
|
|
|
|
Kr |
r,1; |
Us,1 |
|
|
|||||
Rs (Ts p 1)is,1 |
Lsis,2ωc |
Tr |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.58) |
|
|
|
|
|
|
|
|
Us,2 KrUr,2 Rs (Ts p 1)is,2 |
Lsis,1ωc Kr r,1ω , |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Ts − эквивалентная электромагнитная постоянная времени цепи статора,
|
|
|
|
Ts |
Ls / Rs Ls / Rs . |
||
Если представить "1", "2" составляющие ЭДС, наводимые в статоре, как
[13]
|
|
Kr |
|
|
Es,1 |
|
|
||
Tr |
r,1 Lsis,2ωc ; |
|
||
|
|
|
(4.59) |
|
|
|
|
|
,. |
Es,2 |
Kr r,1 Lsis,1ωc |
|||
где с учетом рис. 4.4, б выражение
Kr |
|
|
K |
|
r,1 |
R (K i |
K 2i |
)R |
|
|
r,1 |
r L |
|||||||
T |
|
r |
r r,1 |
r s,1 |
r |
||||
r |
|
|
|
r |
|
|
|
|
|
|
и |
определяет падение напряжения в роторной цепи АД, выражения Lsis,2ωc |
|
характеризуют ЭДС самоиндукции или падение напряжения на |
Lsis,1ωc |
индуктивном сопротивлении цепи статора, а слагаемое Kr r,1ω учитывает
составляющую ЭДС вращения, наводимую в статоре потокосцепления ротора,
то система уравнений (4.58) примет вид:
|
|
|
|
Us,1 KrUr,1 Es,1 Rs (Ts p 1)is,1; |
|
||
|
|
|
|
|
|
|
(4.60) |
|
|
|
, |
Us,2 KrUr,2 Es,2 Rs (Ts p 1)is,2 |
|||
Разложим далее собственный вектор ротора(4.56) на действительную (ось
"1") и мнимую (ось "2") части, находим:

|
U |
r,1 |
|
Tr p 1 |
|
r,1 |
K |
r |
R i |
; |
|
|
||||||||||||
|
|
|
|
|||||||||||||||||||||
|
|
|
|
Tr |
|
|
|
|
|
r s,1 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
U |
r,2 |
(ω -ω) |
r,1 |
|
K |
r |
R i |
|
,. |
|
|
||||||||||||
|
|
|
|
c |
|
|
|
|
|
|
r s,2 |
|
|
|
||||||||||
откуда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r,1 |
TrUr,1 Kr RrTris,1 |
|
|
|
TrUr,1 Lmis,1 |
|
(4.61) |
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
Tr p 1 |
|
|
|
|
|
|
|
|
|
|
Tr p 1 |
|
|||||||||
|
Ur,2 Kr Rris,2 |
|
s , |
(4.62) |
||||||||||||||||||||
|
|
|
||||||||||||||||||||||
|
c |
|
|
|
|
r,1 |
|
|
|
|
|
|
|
|
|
|
c |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где Lm Kr RrTr − взаимная индуктивность обмоток статора |
и ротора, |
|||||||||||||||||||||||
обусловленная действием |
главного |
|
|
магнитного потока возбуждения: |
||||||||||||||||||||
s ( c ) / c − скольжение двигателя. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Уравнение электромагнитного момента A при ориентации r |
по оси "1" |
|||||||||||||||||||||||
получаем из соотношения (4.49) при r,2 0 : |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
M |
3 |
Z |
|
K |
|
|
|
|
|
i |
. |
|
|
|
(4.63) |
||||||
|
|
|
|
p |
r |
|
|
|
|
|
||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
r,1 s,2 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Из (4.6) запишем уравнение движения обобщенного асинхронного ЭП:
м |
1 |
(M Mc ), |
(4.64) |
|
|||
|
|||
|
J p |
|
|
где м − механическая скорость ротора АД( от датчика скорости).

Структурная схема двухфазного АД (с фазным ротором и НПЧ в цепи статора), построенная на основании уравнений (4.58) и (4.61)÷(4.64) в системе координат 1-2, ориентированной по вектору потокосцепления ротора r ,
приведена на рис. 4.6.
Отметим, что аналогичная структурная схема двухфазного АД с короткозамкнутым ротором (КЗ) будет соответствовать структуре на рис. 4.6
при выполнении в ней: Ur,1 0 и Ur,2 0 .
Входными переменными статорной цепи являются потокосцепления
ротора r,1 |
r |
, составляющие Us,1, Us,2 |
напряжения питания |
статора, |
составляющие Ur,1,Ur,2 напряжения питания |
ротора (для АД с |
фазным |
||
ротором), текущая электрическая угловая скорость АД и синхронная электрическая скорость электромагнитного поля c , а так же с учетом соотношений (3.7) – компенсационные перекрестные связи от НПЧ. Выходные
переменные статорной цепи − это составляющие is,1 и is,2 тока |
статора. |
||||
Входными переменными роторной цепи являются |
|
составляющая |
|||
взаимного |
потокосцепления |
Lmis,1, |
составляющая |
Kr Rris,2 , |
|
пропорциональная падению напряжения на активном сопротивлении ротора,
скорость , а также составляющая Ur,1 и Ur,2 напряжения питания ротора
(для АД с фазным ротором), а выходной переменной − потокосцепления ротораr,1. Результирующая входная составляющая Ur,2 после деления
на потокосцепление ротора r,1 преобразуется в сигнал, пропорциональный скольжению двигателя s :
c Ur,2 Kr Rris,2 s c .
r,1