

ПСЖД лабы
.pdfФедеральное агентство железнодорожного транспорта Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования «Уральский государственный университет путей сообщения»
(ФГБОУ ВПО УрГУПС)
К. А. Стаценко
Ю. Н. Виноградов
Н. Г. Фетисова
Подвижной состав железных дорог
Методические указания к лабораторным работам по дисциплине «Подвижной состав железных дорог» для студентов направления подготовки
280700.62 «Техносферная безопасность» (профили подготовки «Безопасность технологических процессов
и производств», «Инженерная защита окружающей среды»)
Екатеринбург Издательство УрГУПС 2014

УДК 629.4 С49
Стаценко, К. А.
С49 Подвижной состав железных дорог : методические указания / К. А. Стаценко, Ю. Н. Виноградов, Н. Г. Фетисова. — Екатеринбург : Изд-во УрГУПС, 2014. — 63,[1] с.
Методические указания предназначены для студентов всех форм обучения направления подготовки 280700.62 «Техносферная безопасность» (профили подготовки «Безопасность технологических процессов и производств», «Инженерная защита окружающей среды»), содержат теоретические сведения и практические рекомендации для подготовки и проведения лабораторного практикума по дисциплине «Подвижной состав железных дорог».
В указаниях даны сведения по организации и проведению лабораторных работ, а также требования к содержанию и оформлению отчетов.
Выполнение курса лабораторных работ способствует формированию у студентов следующих профессиональных компетенций: ПК 4, ПК 8, ПК 12.
УДК 629.4
Авторы:
К. А. Стаценко, канд. техн. наук, УрГУПС Ю. Н. Виноградов, канд. техн. наук, УрГУПС
Н. Г. Фетисова, УрГУПС
Рецензент:
В. А. Усов, канд. техн. наук, УрГУПС
©Уральский государственный университет путей сообщения (УрГУПС), 2014
Оглавление
Введение.................................................................................... |
4 |
1 Лабораторная работа № 1. |
|
Принцип действия и конструкция тягового |
|
электродвигателя постоянного тока................................... |
6 |
2 Лабораторная работа № 2. |
|
Контроль колесных пар в эксплуатации.......................... |
15 |
3 Лабораторная работа № 3. |
|
Проверка автосцепок в эксплуатации.............................. |
27 |
4 Лабораторная работа № 4. |
|
Оптический контроль технического состояния |
|
узлов электровоза эндоскопами....................................... |
35 |
5 Лабораторная работа № 5. |
|
Физические основы и методы ультразвуковой |
|
дефектоскопии.................................................................. |
40 |
6 Лабораторная работа № 6. |
|
Магнитная дефектоскопия............................................... |
52 |
3
Введение
Цикл лабораторных работ по дисциплине «Подвижной состав железных дорог» знакомит студентов с устройством и работой основных узлов подвижного состава, влияющих на безопас-
ность движения поездов. В процессе обучения студенты приобретают также практические навыки работы с измерительной и испытательной аппаратурой, применяемой при эксплуатации и ремонте подвижного состава железных дорог.
Лабораторные работы проводятся студентами в составе бригад по два-пять человек.
На первом вводном занятии все студенты обязаны прослушать или изучить самостоятельно требования по технике безопасности при выполнении лабораторных работ под личную роспись в журнале инструктажа установленной формы.
К выполнению лабораторной работы допускаются подготовленные студенты, которые знают устройство узла, цель работы, последовательность ее проведения, знакомы с измерительными устройствами и рекомендованной литературой. Контроль подготовки студентов осуществляет преподаватель.
Подготовка оборудования, измерительных инструментов, приборов производится под руководством преподавателя с соблюдением техники безопасности.
В случае повреждения измерительных устройств работу следует прервать и сообщить преподавателю.
После окончания работы бригада оценивает полученные данные, производит сравнение результатов измерений с требованиями инструкций и правил ремонта, определяет необходимость дополнительных замеров. После этого протокол лабораторной работы предоставляется преподавателю.
По результатам выполненной лабораторной работы оформляется отчет с соблюдением правил и норм оформления по ГОСТ 2.105–95 ЕСКД «Общие требования к текстовым документам».
4
В отчете необходимо отразить: — цель работы;
— краткое описание устройства и работы узла; — отдельные эскизы узла и приспособлений; — таблицы с результатами замеров; — выводы.
Перечень компетенций, формируемых в результате выполнения курса лабораторных работ учебной дисциплины:
ПК 4 — способен оценивать риск и определять меры по обеспечению безопасности разрабатываемой техники;
ПК 8 — способен ориентироваться в основных методах и системах обеспечения техносферной безопасности, обоснованно выбирать известные устройства, системы и методы защиты человека и природной среды от опасностей;
ПК 12 — готов использовать знания по организации охраны труда, охраны окружающей среды и безопасности в чрезвычайных ситуациях на объектах экономики.
5
1Лабораторная работа № 1.
Принцип действия и конструкция тягового электродвигателя постоянного тока
1.1 Цель работы
Изучить принцип действия и конструкцию тягового электродвигателя постоянного тока.
1.2 Формируемые компетенции
ПК 4 — способен оценивать риск … разрабатываемой техники.
1.3 Общие сведения
1.3.1 Принцип действия тягового электродвигателя
Значение и роль тяговых электродвигателей на ЭПС с полным основанием можно сравнить с ролью сердца в жизни человека, так как все основные характеристики ЭПС определяются параметрами и режимами работы ТЭД. Наибольшее распространение в промышленности получили электрические двигатели двух типов: коллекторные двигатели постоянного тока с различными системами возбуждения и трёхфазные асинхронные двигатели (АД). Эти двигатели могут применяться на ЭПС, так как допускают возможность регулирования в широких пределах частоты вращения, т. е. числа оборотов, что позволяет изменять скорость движения поезда и дают возможность регулировать в широком диапазоне силу тяги или вращающий момент, развиваемый двигателем.
В первые десятилетия XX в. учёным и инженерам удалось решить технические проблемы, связанные с разработкой и производством коллекторных двигателей постоянного тока для ЭПС. Мощность этих
6
двигателей непрерывно возрастала; в настоящее время составляет 600–700 кВт. При проектировании электровозов и электропоездов постоянного тока конструкторы имели возможность выбирать такие технические решения, которые основывались на применении ТЭД постоянного тока, так как в КС протекает такой же постоянный ток, как и в ТЭД, и на ЭПС не требовалось устанавливать преобразовательные устройства. В результате схема и конструкция ЭПС получились простыми, сравнительно дешёвыми и надёжными в эксплуатации.
Для ЭПС переменного тока промышленной частоты были разработаны коллекторные электродвигатели пульсирующего тока, которые по конструкции некоторых узлов являются более сложными, однако надёжность их работы в эксплуатации не вызывает сомнений у специалистов. Успехи электротехнической промышленности в создании мощных полупроводниковых приборов (транзисторы IGBT, тиристоры GTO и т. п.) и на их основе преобразователей для питания АД в 80 х годах XX в. создали условия для широкого их внедрения на ЭПС постоянного и переменного тока.
В настоящее время реальное положение в локомотивном хозяйстве России таково, что практически весь ЭПС оснащён ТЭД постоянного
ипульсирующего тока, а спроектированные и изготовленные новые опытные электровозы и электропоезда с бесколлекторными асинхронными и вентильными ТЭД находятся на этапе испытаний и доработки. Поэтому представляется целесообразным рассмотреть в данном курсе принцип работы и конструкцию ТЭД постоянного тока.
Тяговые электрические двигатели на ЭПС предназначены для преобразования электрической энергии, получаемой из КС, в механическую энергию, которая расходуется на преодоление различных сопротивлений в процессе движения поезда. Принцип действия электродвигателя основан на возникновении силы, действующей со стороны магнитного поля, на проводник с током. Она обозначается силой Ампера. Если источник магнитного поля неподвижен, а проводник с током может перемещаться, то под действием силы Ампера он начнёт вращаться и совершит механическую работу. Количественно сила Ампера, действующая на один проводник с током, пропорциональна произведению магнитной индукции В, тока I1 в проводнике
идлины проводника lП:
F1 = B · I1 · lП · sinα1, |
(1.1) |
где F — сила Ампера, действующая на один проводник с током, Н; В — магнитная индукция, Тл; I — ток в одном проводнике, А; lп — длина
7
проводника, м; α1 — угол между силовыми линиями магнитного поля и направлением тока в проводнике, α1 = 90°.
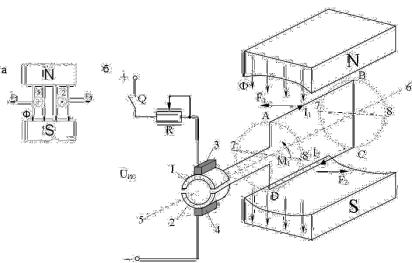
Направление силы, действующей на проводник с током, зависит от направления магнитного поля и направления тока и определяется правилом левой руки, порядок применения которого поясняется на рисунке 1.1.
|
|
|
а) |
б) |
Рисунок 1.1 — Применение правила левой руки
а— для отдельных проводников; б — для рамки A B C D
Вмагнитное поле Ф между полюсами N и S помещаются расположенные горизонтально и показанные окружностями проводники 1 и 2, представляющие собой медные шины круглого сечения. Предположим, что на рисунке 1.1 проводники никак не связаны между собой. Если пропускать по этим проводникам ток, то необходимо задать его направление. Кружок с крестом проводника 1 условно означает, что по нему протекает ток, направленный «от нас», а кружок с точкой проводника 2 — соответственно ток, направленный «к нам». Теперь имеются все исходные данные для применения правила левой руки (рисунок 1.1): ладонь левой руки следует расположить так, чтобы в неё входили линии магнитного поля, а четыре вытянутых пальца указывали направление тока в проводнике, тогда отставленный большой палец покажет направление силы F1, действующей на проводник
8
со стороны поля. В результате получим, что на проводник 1 действует сила F1, направленная влево, а на проводник 2 — сила F1, направленная вправо. Для изменения направления силы F1 необходимо изменить направление магнитного поля Ф или направление тока I1. Если же одновременно изменить направление магнитного поля и тока в проводнике, то направление силы F1 останется неизменным.
Основываясь на этих принципах, можно получить конструкцию простейшего электродвигателя, который приведён на рисунке 1.2. С этой целью конец первого проводника А В соединим с началом второго C D, а конец второго с началом первого, и получим прямоугольную рамку A B C D, которую можно разместить на стальном цилиндре, закреплённом в подшипниках и имеющем возможность вращаться вокруг оси 5–6. Стальной цилиндр должен продолжаться за пределы рамки по направлению «к нам», тогда на нём можно установить изолированные друг
от друга и от цилиндра два медных полукольца: верхнее 1 и нижнее 2, соединив их электрически с рамкой, в результате получим конструкцию, в которой рамка и медные изолированные полукольца, располагаясь на стальном цилиндре, могут вращаться вокруг оси 5–6, при этом рамка пронизывается магнитным потоком Ф полюсов N и S.
Затем на каждом полукольце следует установить и закрепить угольные щётки 3 и 4, соединив их через резистор R с регулируемым сопротивлением и ключ Q с зажимами «плюс» и «минус» источника энергии UИС.
После замыкания ключа Q ток от зажима «плюс» будет протекать по цепи: резистор R, щётка 3, медное полукольцо 1, проводник А В (ток I1), проводник C D (ток I2), медное полукольцо 2, щётку 4 к зажиму «минус» этого же источника. Очевидно, что токи I1 и I2, а также силы F1 и F2, действующие на проводники, равны, но имеют противоположное направление согласно правилу левой руки. Таким образом, возникает пара сил F1–F2, действующих в одной плоскости и создающих вращающий момент M1 = F1 lВС, где lВС — расстояние между проводниками рамки, направленный против часовой стрелки. Изменение величины сопротивления резистора R можно при необходимости увеличить токи I1, I2 в проводниках рамки, а следовательно, и силы F1, F2 и вращающий момент M1 согласно выражению (1.1).
Согласно закону электромагнитной индукции Фарадея, при перемещении проводника с током в магнитном поле в нём наводится
9
ЭДС вращения, величина которой определяется согласно следующему выражению:
E = B · VЯ · lППВ · sinα2, |
(1.2) |
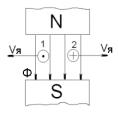
где Е — ЭДС вращения, В; В — магнитная индукция, Тл; lППВ — длина проводников параллельной ветви, м; VЯ — линейная скорость проводника на поверхности якоря, м/с; α2 — угол между линиями магнитного поля и направлением движения проводника, α2 = 90 о.
Направление ЭДС вращения Е определяется правилом правой руки: ладонь правой руки следует расположить таким образом, чтобы силовые линии магнитного поля Ф входили в неё, большой отогнутый палец указывал направление перемещения проводника со скоростью VЯ, тогда четыре вытянутых пальца укажут направление ЭДС вращения Е.
На рисунке 1.2 у проводника 1 ЭДС вращения Е имеет направление «к нам» (внутри точка), а у проводника 2 — направление «от нас» (внутри крест). Если сравнить рисунок 1.1, а и рисунок 1.2, можно установить, что ток и ЭДС вращения в проводниках 1 и 2 имеют противоположное направление, именно поэтому ЭДС вращения в технической литературе часто называют «противо ЭДС».
1.3.2 Конструкция тягового электродвигателя
Основными узлами двигателя (рисунок 1.3) являются остов 1 с полюсами 2, несущими на себе обмотку возбуждения 3, сердечник якоря 4, в пазах которого уложены проводники 5, образующие обмотку якоря, и коллектор 8.
Остов является неподвижной частью и по этому признаку называется статором, якорь в процессе работы двигателя вращается и называется ротором. Остов 1 представляет собой тонкостенную пустотелую стальную литую или сварную конструкцию круглой формы или в виде восьмигранника. Снаружи остов имеет с одной стороны приливы для подвешивания ТЭД к раме тележки, а с другой стороны — приливы для установки моторно-осевых подшипников, через которые ТЭД жёстко опирается на ось колёсной пары. В результате ТЭД оказывается не полностью подрессоренным, в этих условиях при индивидуальном приводе колёсная пара воспринимает примерно половину веса ТЭД и все динамические нагрузки, возникающие при движе-
10