

Пример 2
1.1.Рассмотрим схему кулисного механизма брикетировочного автомата. Изобразим структурную схему (рис.1.6).
1.2.
Подвижные звенья: 1 – кривошип (вращение
вокруг точки
![]() );
2 – камень (плоскопараллельное движение);
3 – кулиса (возвратно - вращательное
движение); шатун (плоскопараллельное
движение); 5 – ползун (возвратно-поступательное
движение).
);
2 – камень (плоскопараллельное движение);
3 – кулиса (возвратно - вращательное
движение); шатун (плоскопараллельное
движение); 5 – ползун (возвратно-поступательное
движение).
Подвижных звеньев
![]() = 5.
= 5.
Входное звено 1 – кривошип, выходное – ползун 5.
1.3 Кинематические пары.
|
Обозначение |
О1 |
A |
B |
О3 |
C |
D |
D΄ |
|
Соединение звеньев |
0-1 |
1-2 |
2-3 |
3-0 |
3-4 |
4-5 |
5-0 |
|
Класс |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
|
Вид |
Вращ. |
Вращ. |
Пост. |
Вращ. |
Вращ. |
Вращ. |
Пост. |
Всего кинематических пар 7, все низшие.
1.4.
![]()

Рис. 1.6. Структурная схема механизма брикетировочного автомата
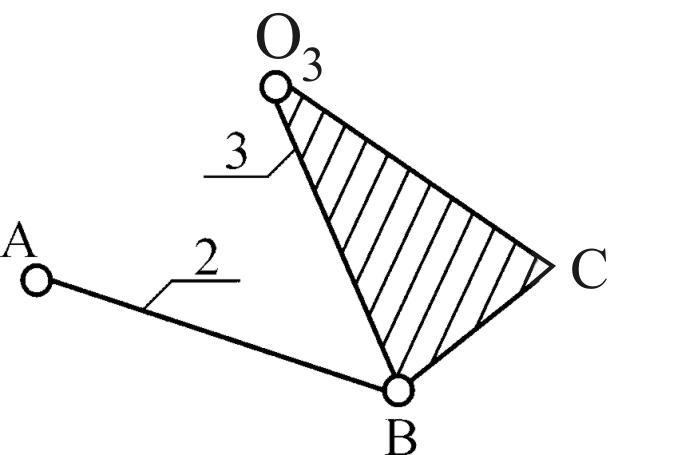
1.5. Группы Ассура и начальное звено.
|
|
|
|
|
Рис. 1.7. Группа 4-5
W=3 Класс 2-ой, порядок – 2-ой. |
Рис. 1.8. Группа 2-3
W=3 Класс 2-ой, порядок – 2-ой. |
Рис.1.9Начальное звено
W=3 Класс 1-ый, порядок 1-ый. |



1.6. Механизм шарнирно-рычажный, плоский, 2-го класса. Имеет одну степень свободы. Состоит из двух структурных групп и начального звена.
1.7.
Избыточные связи:
![]() ,
где
,
где![]() =1…5,
или для
заданного механизма
=1…5,
или для
заданного механизма![]() .
.
Принимаем соотношение
5![]() +4
+4![]() +3
+3![]() =29,
получаемое при
=29,
получаемое при![]() =3,
=3,![]() =2,
=2,![]() =3.
=3.
1.8.
Понижаем класс кинематических пар
соединений звеньев 0-3, 4-5 до 3-его; 1-2, 2-4
до 4-го. Схема механизма при
![]() =0
показана на
рис. 1.10.
=0
показана на
рис. 1.10.

Рис. 1.10. Схема механизма брикетирования без избыточных связей
Пример 3
1.1 Схема механизма компрессора (рис.1.11).
1.2. Подвижные звенья:
1 – кривошип (вращение вокруг точки О1); 2 – шатун (плоскопараллельное движение); 3 – коромысло (возвратно-вращательное движение); 4 – шатун (плоскопараллельное движение); 5 – ползун (возвратно-поступательное движение).
Подвижных звеньев n = 5.
Входное звено 1 – кривошип, выходное – ползун 5.
Механизм предназначен для преобразования вращательного движения кривошипа в возвратно-поступательное движение ползуна.
1.3. Кинематические пары.
|
Обозначение |
О1 |
A |
B |
О3 |
C |
D |
D΄ |
|
Соединение звеньев |
0-1 |
1-2 |
2-3 |
3-0 |
3-4 |
4-5 |
5-0 |
|
Класс |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
|
Вид |
Вращ. |
Вращ. |
Вращ. |
Вращ. |
Вращ. |
Вращ. |
Пост. |
Всего кинематических пар 7, все низшие.
1.4.
![]()
![]()
![]() ,
,![]() ТогдаW
= 1.
ТогдаW
= 1.
В механизме одно ведущее звено (кривошип 1).
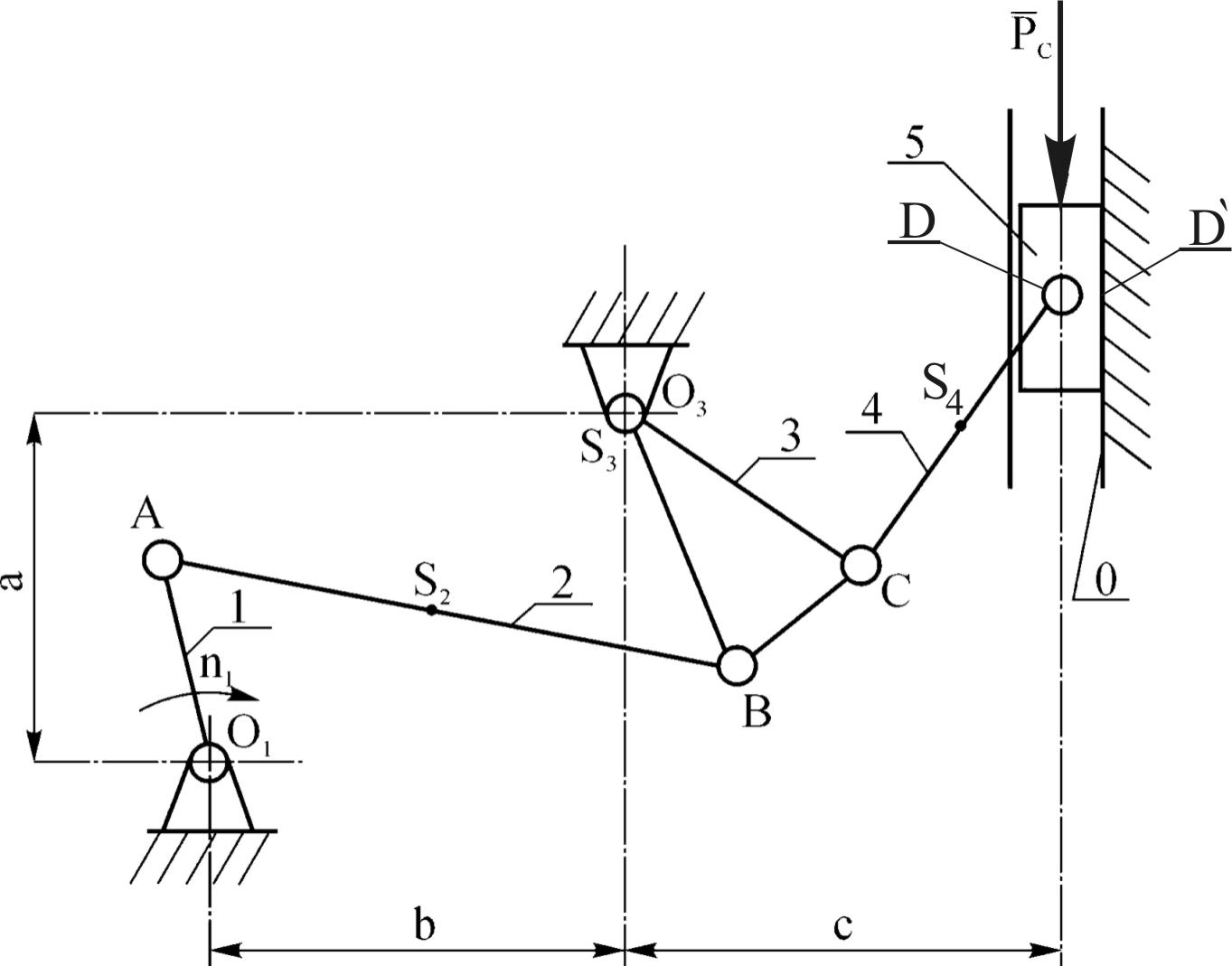
Рис. 1.11. Структурная схема механизма компрессора
1.5. Группы Асура и начальное звено.
|
|
|
|
|
Рис. 1.12. Группа 4-5
Класс 2-ой, порядок – 2-ой. |
Рис. 1.13. Группа 2-3
Класс 2-ой, порядок – 2-ой. |
Рис. 1.14 Начальное звено
Класс 1-ый, порядок 1-ый |


Механизм шарнирно-рычажный, плоский, 2-го класса.
Избыточные связи q=W-6n+5p5=1-65+57=6.
Принимаем соотношение 5р5+4р4+3р3=29, получаемое прир5=3,р4=2,р3=2. Понижаем класс кинематических пар, например, соединений звеньев 4-5, 2-3 до 3-его, 1-2, 3-4 – до 4-го. Получаем схему механизма (рис. 1.15).
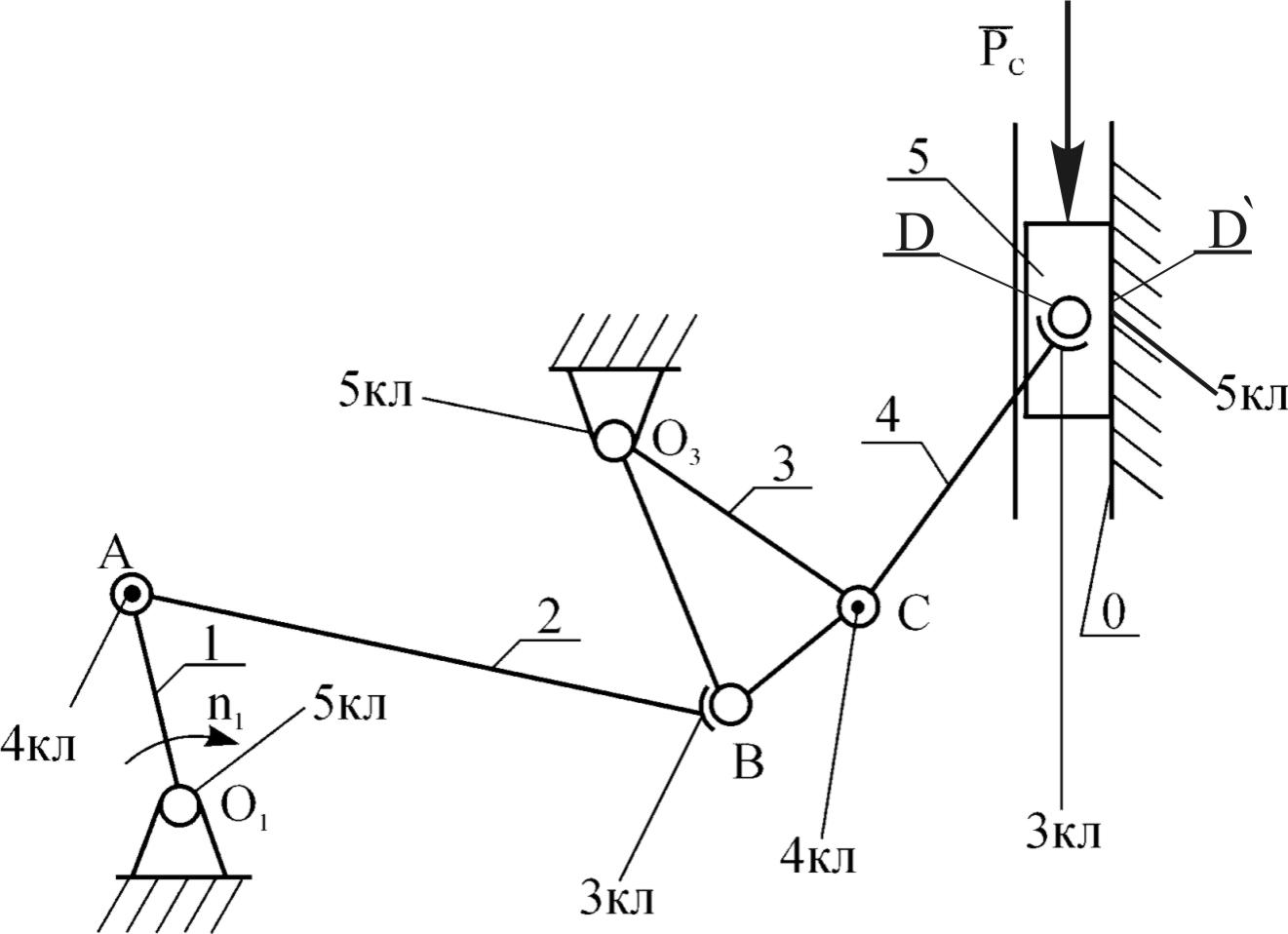
Рис. 1.15. Схема механизма компрессора без избыточных связей