

2.4.Примеры построения планов скоростей Пример 1
Схема механизма, построенного описанным выше методом, показана на рис. 2.5, а соответствующий план скоростей изображен на рис. 2.6.
Пусть задано
![]() =100
об/мин, тогда угловая скорость кривошипа
=100
об/мин, тогда угловая скорость кривошипа![]() .
.
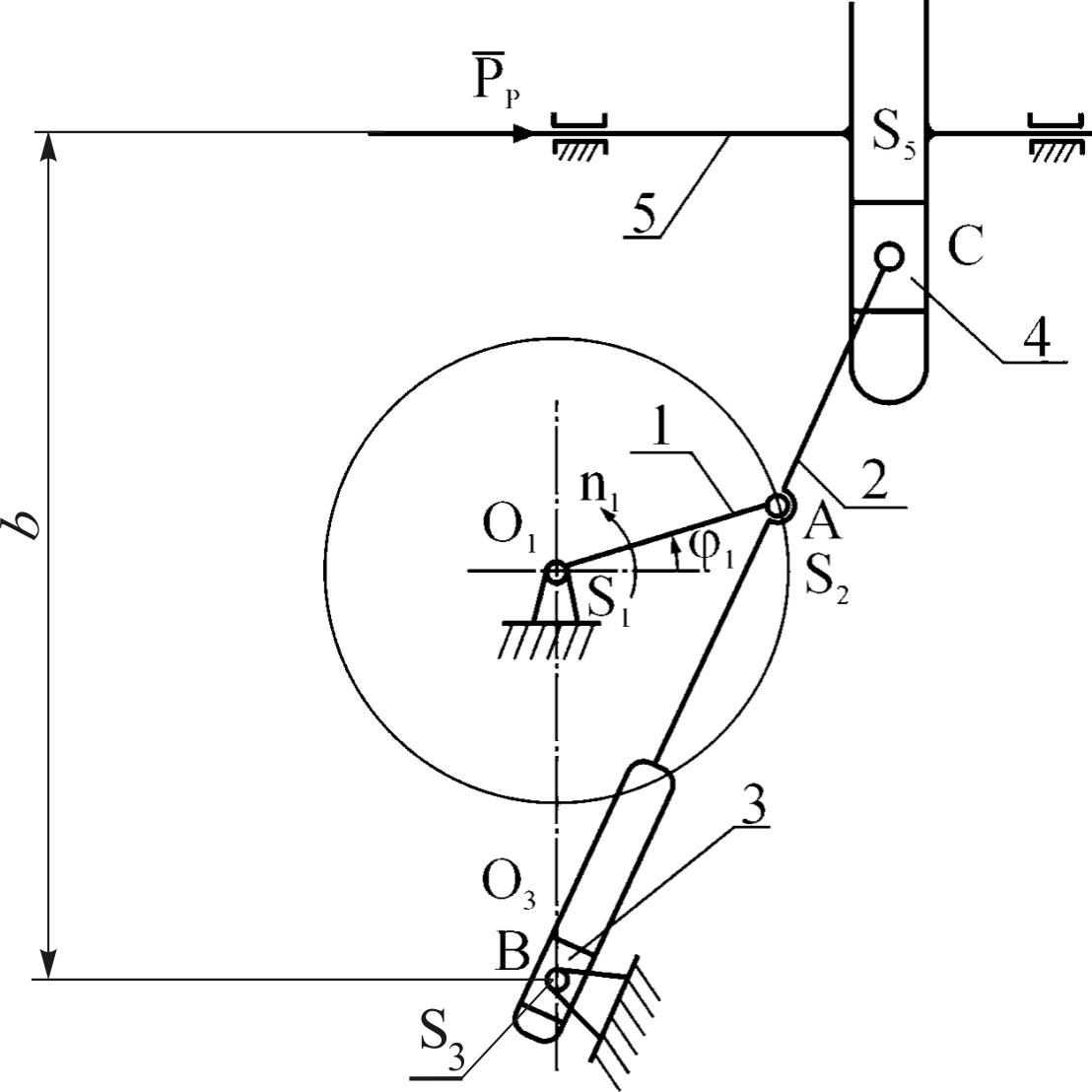
Рис. 2.5. Схема механизма

Рис. 2.6 План скоростей для поперечно-строгательного станка
Скорость точки А,
принадлежащей одновременно первому и
второму звену,
![]() .
Задаемся длиной вектора
.
Задаемся длиной вектора![]() ,
тогда масштабный коэффициент плана
скоростей равен
,
тогда масштабный коэффициент плана
скоростей равен![]() .
.
Рекомендуется
принимать
![]() таким, чтобы
таким, чтобы![]() содержал
одну значащую цифру: 1,2 и 5 с нулями, тогда
все вычисления можно выполнять устно,
не используя вычислительную технику.
Из произвольно выбранной точки
содержал
одну значащую цифру: 1,2 и 5 с нулями, тогда
все вычисления можно выполнять устно,
не используя вычислительную технику.
Из произвольно выбранной точки
![]() (полюса плана скоростей) проводим отрезок
(полюса плана скоростей) проводим отрезок
![]() перпендикулярно положению кривошипаО1А
в направлении угловой скорости (рис. 2.6).
Для скорости точки В2
векторные уравнения имеют вид:
перпендикулярно положению кривошипаО1А
в направлении угловой скорости (рис. 2.6).
Для скорости точки В2
векторные уравнения имеют вид:
![]()
или
![]()
![]()
![]()
Здесь
![]() – скорость неподвижной точки,
– скорость неподвижной точки,![]() – скорость точкиВ2
относительно
неподвижной точки В0,
то есть скорость в абсолютном движении,
– скорость точкиВ2
относительно
неподвижной точки В0,
то есть скорость в абсолютном движении,
![]() - скорость в относительном движении
звена 2.
- скорость в относительном движении
звена 2.
Решая последнее
уравнение графически (через точку
![]() провести прямую,
перпендикулярную
звену ВС
– направление
вектора
провести прямую,
перпендикулярную
звену ВС
– направление
вектора
![]() ,
а через точку
,
а через точку
![]() – прямую,
параллельную звену ВС
– направление вектора
– прямую,
параллельную звену ВС
– направление вектора
![]() ),
получим точку
),
получим точку![]() .
Отрезок
.
Отрезок![]()
![]() соответствует скорости
соответствует скорости![]() .
.
Скорость точки С можно определить, пользуясь свойством пропорциональности одноименных отрезков на плане положений механизма и на плане скоростей:
![]()
АС
и АВ
измеряемые на плане механизма, а
![]() – на плане скоростей.
– на плане скоростей.
На продолжении
отрезка
![]() откладываем
откладываем![]() и получаем точкус2.
и получаем точкус2.
Для скорости точки С5 пятого звена векторные уравнения имеют вид:
![]()
|| x || y
Решаем это уравнение
графически. Из точки С2
проводим прямую, перпендикулярную
направлению движения штока 5, а из полюса
![]() – прямую, параллельную собственному
движению. Получаем точку
– прямую, параллельную собственному
движению. Получаем точку
![]() .
Отрезок
.
Отрезок![]() соответствует в масштабе
соответствует в масштабе![]() скорости точкиС3.
Скорости центров масс S2,
S5
равны скоростям соответственно точек
А
и С5.
Точки, скорости которых равны нулю, на
плане скоростей находятся в полюсе
скорости точкиС3.
Скорости центров масс S2,
S5
равны скоростям соответственно точек
А
и С5.
Точки, скорости которых равны нулю, на
плане скоростей находятся в полюсе![]() .
.
Определяем величины скоростей.
![]() ;
;
![]() ;
;![]() ;
;![]() ,
,
где
![]() -
отрезки в мм, снятые с плана скоростей.
-
отрезки в мм, снятые с плана скоростей.
Находим угловую скорость звена 2:
![]() ,
,
которая направлена против часовой стрелки.
Примечание: Приведенные выше значения отрезков в мм при вычислении скоростей, могут изменится после размножении пособия.
Пример 2
Схема механизма брикетировочного автомата построена на рис. 2.7, а план скоростей и ускорений соответственно на рис. 2.8 и рис.2.12.
Задано:
![]() =40
об/мин. Угловая скорость кривошипа
=40
об/мин. Угловая скорость кривошипа
![]() .
.
Построение планов начинаем с определения скоростей (ускорений) точек закон движения которых известен. Скорость точки А1,2, принадлежит одновременно 1 и 2 звену
![]() м/с
м/с
Задаемся длиной
вектора
![]() и вычисляем масштабный коэффициент
плана скоростей:
и вычисляем масштабный коэффициент
плана скоростей:
![]()
Из произвольно
выбранной на чертеже точки
![]() (полюс плана
скоростей) проводим линию перпендикулярно
положению кривошипа О1А
(рис. 2.8) в направлении вращения кривошипа
и откладываем на ней отрезок 66 мм.
Составляем векторные уравнения для
определения скоростей других точек.
Скорости точки А,
принадлежащей первому и второму звену
камню, будут равны
(полюс плана
скоростей) проводим линию перпендикулярно
положению кривошипа О1А
(рис. 2.8) в направлении вращения кривошипа
и откладываем на ней отрезок 66 мм.
Составляем векторные уравнения для
определения скоростей других точек.
Скорости точки А,
принадлежащей первому и второму звену
камню, будут равны
![]() =
=
![]() =
=![]() .
В абсолютном движении её траектория
есть окружность радиуса
.
В абсолютном движении её траектория
есть окружность радиуса
![]() и
может быть получена сложением переносного
(вращение кулисы 3) и относительного
(перемещения ползуна 2 вдоль кулисы
движений (рис.2.9). На рисунке дугаАА″
– траектория абсолютного движения,
дуга АА′
при вращении кулисы – траектория
переносного движения, перемещение по
прямой А′А′′
вдоль кулисы – относительное движение.
Таким образом, из точки А
в абсолютном движении
попадаем в точку
А′′
выполняя два движения: поворачивая
кулису и
перемещая ползун вдоль неё.
и
может быть получена сложением переносного
(вращение кулисы 3) и относительного
(перемещения ползуна 2 вдоль кулисы
движений (рис.2.9). На рисунке дугаАА″
– траектория абсолютного движения,
дуга АА′
при вращении кулисы – траектория
переносного движения, перемещение по
прямой А′А′′
вдоль кулисы – относительное движение.
Таким образом, из точки А
в абсолютном движении
попадаем в точку
А′′
выполняя два движения: поворачивая
кулису и
перемещая ползун вдоль неё.
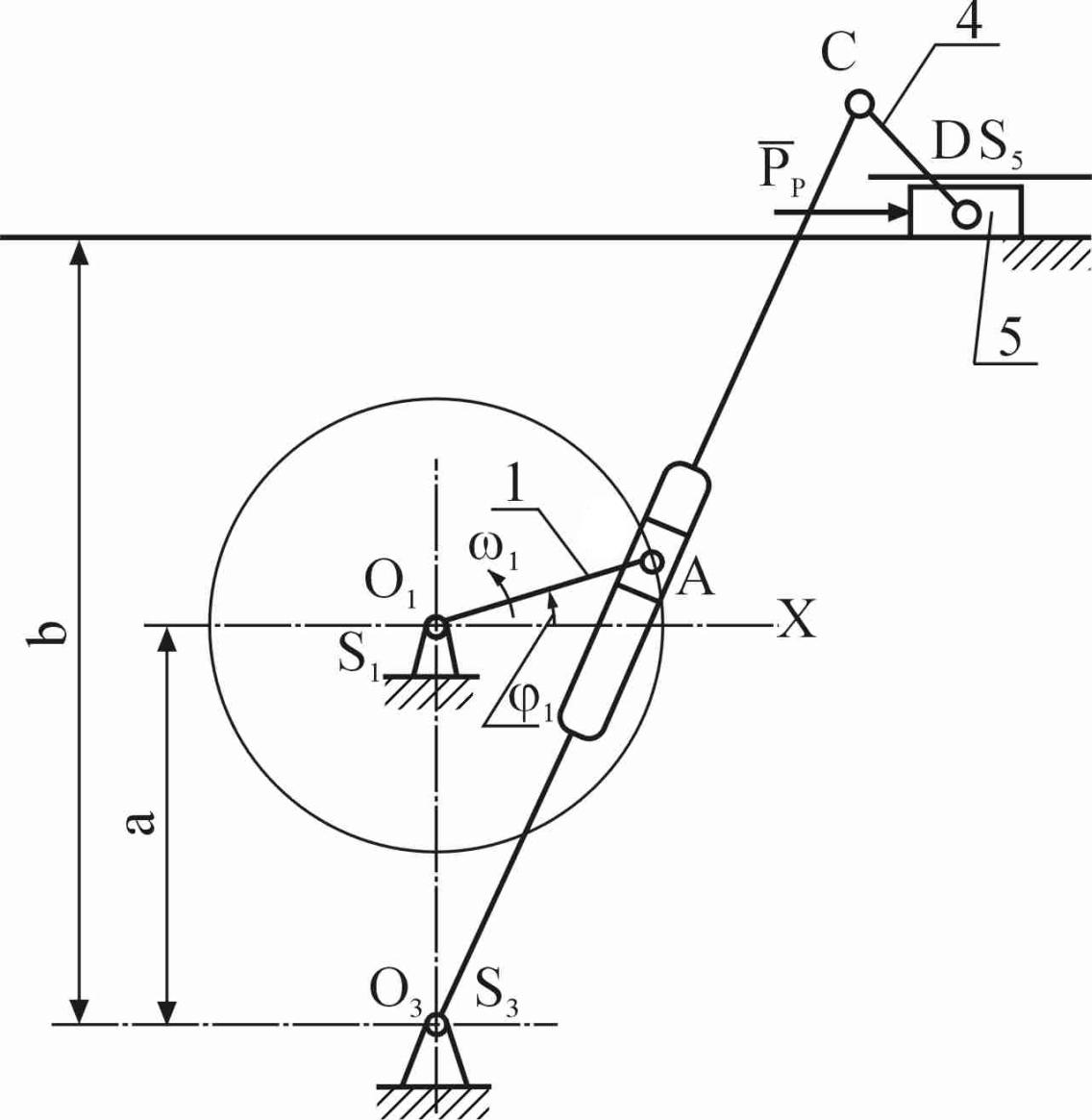
Рис. 2.7. Схема механизма
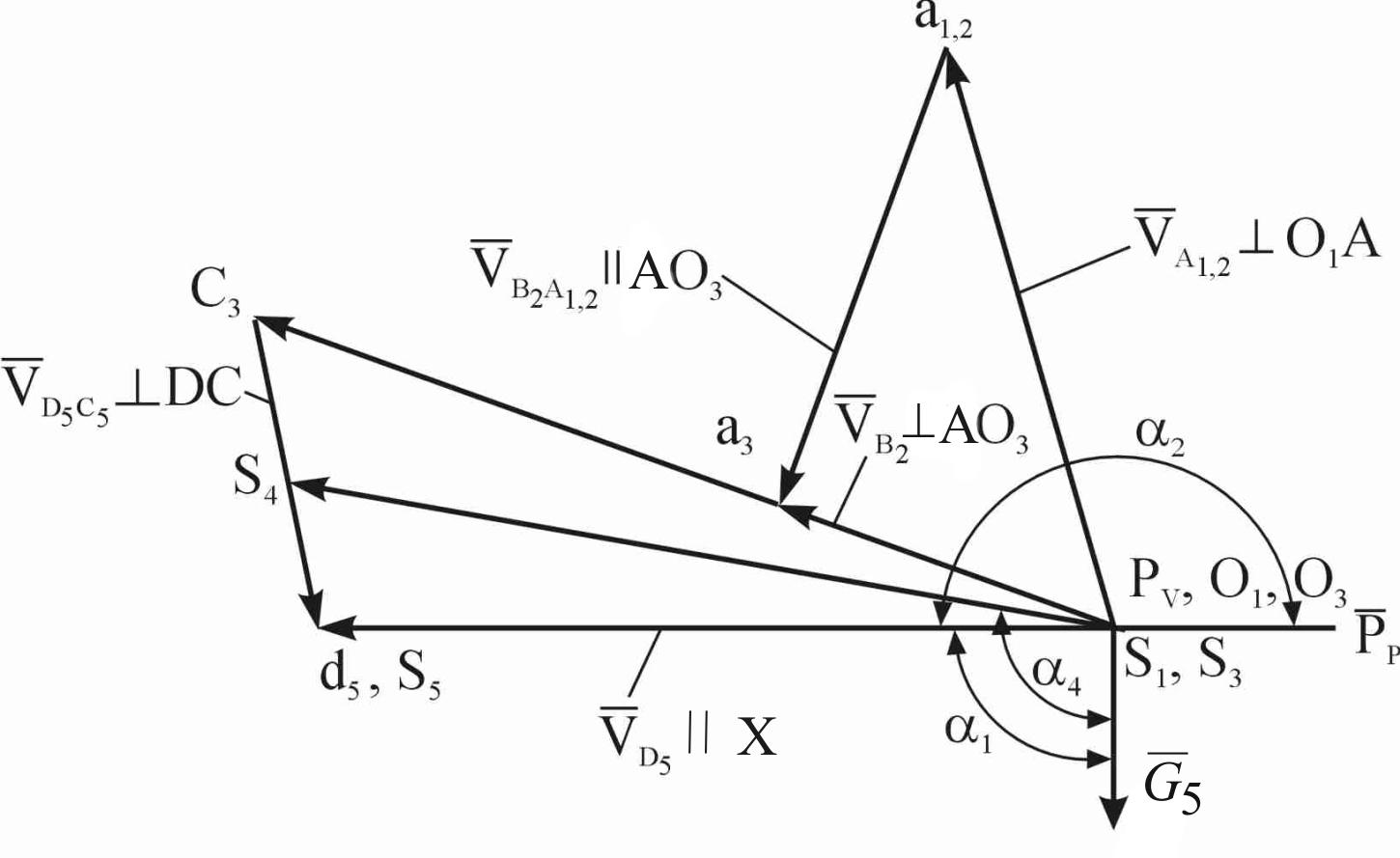
Рис. 2.8 План скоростей
Запишем уравнения
![]()
![]() ;
;
![]()
![]()
![]()
Здесь
![]() – скорость неподвижной точки, равная
нулю;
– скорость неподвижной точки, равная
нулю;![]() – скорость точкиA3
относительно О3;
– скорость точкиA3
относительно О3;
![]() – скорость точкиA1,2
в относительном движении по отношению
к А3.
– скорость точкиA1,2
в относительном движении по отношению
к А3.
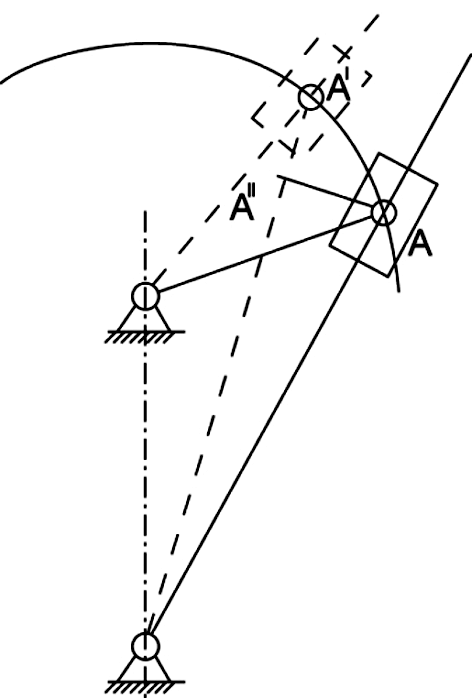
Рис.2.9. Сложение движений
Векторные уравнения
решаем графически (рис. 2.8) Через полюс![]() проводим направление
проводим направление![]() перпендикулярноAО3,
а через конец вектора
перпендикулярноAО3,
а через конец вектора
![]() проводим
прямую, параллельнуюAО3.
Пересечение определяет положение точки
a3
– конец вектора
проводим
прямую, параллельнуюAО3.
Пересечение определяет положение точки
a3
– конец вектора
![]() .
Скорость точкиС
можно определить, используя свойство
пропорциональности одноименных отрезков,
.
Скорость точкиС
можно определить, используя свойство
пропорциональности одноименных отрезков,
а именно:
 .
.
Откладываем на
продолжение прямой
![]() отрезок
отрезок![]() и находим точку
и находим точку
![]() .
.
Для скорости точки D векторное уравнение имеет вид
![]() ;
;
![]() или
или
![]()
||
X
![]()
Решаем это уравнение
графически (рис. 2.8). Через полюс рv
проводим направление скорости параллельно
оси Х.
Через точку c3
проводим направление относительной
скорости
![]() .
Пересечение этих прямых дает точку d,
с которой будет совпадать точка s5,
а точка s4
по свойству пропорциональности лежит
на середине вектора относительной
скорости
.
Пересечение этих прямых дает точку d,
с которой будет совпадать точка s5,
а точка s4
по свойству пропорциональности лежит
на середине вектора относительной
скорости
![]() .
Точки, скорость которых равна нулю, на
плане скоростей находятся в полюсе
.
Точки, скорость которых равна нулю, на
плане скоростей находятся в полюсе![]() .
.
Определяем величины линейных скоростей точек звеньев механизма:
![]() =
=
![]() ∙
μv
= 26∙0,33 = 8,58 м/с;
∙
μv
= 26∙0,33 = 8,58 м/с;
![]() =
=
![]() ∙ μv
=36∙0,33 = 11,88 м/с;
∙ μv
=36∙0,33 = 11,88 м/с;
![]() =
=
![]() ∙
μv
= 67∙0,33 = 22,11 м/с;
∙
μv
= 67∙0,33 = 22,11 м/с;
![]() =
=
![]() ∙
μv
= 62∙0,33 = 20,46 м/с;
∙
μv
= 62∙0,33 = 20,46 м/с;
![]() =
=
![]() ∙
μv
= 23∙0,33 = 8,58 м/с;
∙
μv
= 23∙0,33 = 8,58 м/с;
![]() =
=
![]() =
=![]() ∙ μv
= 58∙0,33 = 19,14 м/с.
∙ μv
= 58∙0,33 = 19,14 м/с.
и угловых скоростей:
ω3
=
![]() /
/![]() =
22,11/0,42 = 52,6 1/с;
=
22,11/0,42 = 52,6 1/с;
ω4
=
![]() /lDC
= 8,58/0,14 = 61,3 1/с.
/lDC
= 8,58/0,14 = 61,3 1/с.