

3.2. Определение сил и моментов сил инерции
В динамических расчетах главный вектор сил инерции и главный момент в случае сложного движения звена определяется по формулам
![]() ;
( 3.1 )
;
( 3.1 )
М![]()
![]() ,
( 3.2)
,
( 3.2)
где m
– масса звена;
![]() -
вектор ускорения центра масс;Js
– момент инерции звена относительно
оси, проходящей через центр масс,
перпендикулярно плоскости движения;
ε –
угловое ускорение звена.
-
вектор ускорения центра масс;Js
– момент инерции звена относительно
оси, проходящей через центр масс,
перпендикулярно плоскости движения;
ε –
угловое ускорение звена.
Для вычисления сил инерции надо определить ускорения аs и ε или из плана скоростей, или аналитически.
В частных случаях
движения звеньев (поступательное или
вращательное) остается или только
главный вектор сил инерции, или главный
момент сил. Аналитически силы инерции
в плоском движении определяются
как:
![]() =
–m
=
–m![]() ;
;
![]() = -m
= -m![]() ;
Мин
= – Js
ε
.
;
Мин
= – Js
ε
.
3.3. Величина и направление реакций
В плоских механизмах
звенья могут образовывать низшие
(вращательные и поступательные
пары) и высшие кинематические пары, у
которых касание элементов происходит
либо в точке, либо по линии. Во вращательной
паре без учета силы трения (рис.3.2,а)
давление на цилиндрическую поверхность
распределено по определенному закону,
зависящему от степени приработанности
поверхностей, смазки и т. д. Если силами
трения пренебречь, то равнодействующая
их проходит через центр шарнира О.
Величина и направление силы
![]() неизвестны и должны быть определены из
кинематического расчета. В идеальной
поступательной паре (рис.3.2,б) реакция
неизвестны и должны быть определены из
кинематического расчета. В идеальной
поступательной паре (рис.3.2,б) реакция![]() нормальна
к направляющим, но величина и точка
приложения её неизвестны. Таким образом,
в низших парах при наличии плоской
системы сил, действующих на звенья
механизма, необходимо иметь два уравнения,
что совпадает с числом условий связи,
накладываемых кинематической парой
плоского механизма.
нормальна
к направляющим, но величина и точка
приложения её неизвестны. Таким образом,
в низших парах при наличии плоской
системы сил, действующих на звенья
механизма, необходимо иметь два уравнения,
что совпадает с числом условий связи,
накладываемых кинематической парой
плоского механизма.
В высшей кинематической паре (рис.3.2,в) реакция нормальна к поверхности. Определению подлежит только её величина. И здесь число уравнений, которые нужно составить для определения реакций, совпадает с числом условий связи, накладываемых кинематической парой.
Если число звеньев в группе – n , то для них можно составить 3n уравнений равновесия. При соединении звеньев только кинематическими парами 5 класса число неизвестных реакций будет равно 2р5. Каждую силу можно определить в том случае, если число уравнений равновесия равно числу неизвестных компонентов сил, т.е. условием статической определимости групп звеньев при действии на них плоской системы сил является равенство
3n – 2р5 =0.
Это условие совпадает с условием, которому удовлетворяют группы звеньев, именуемые группами Ассура.
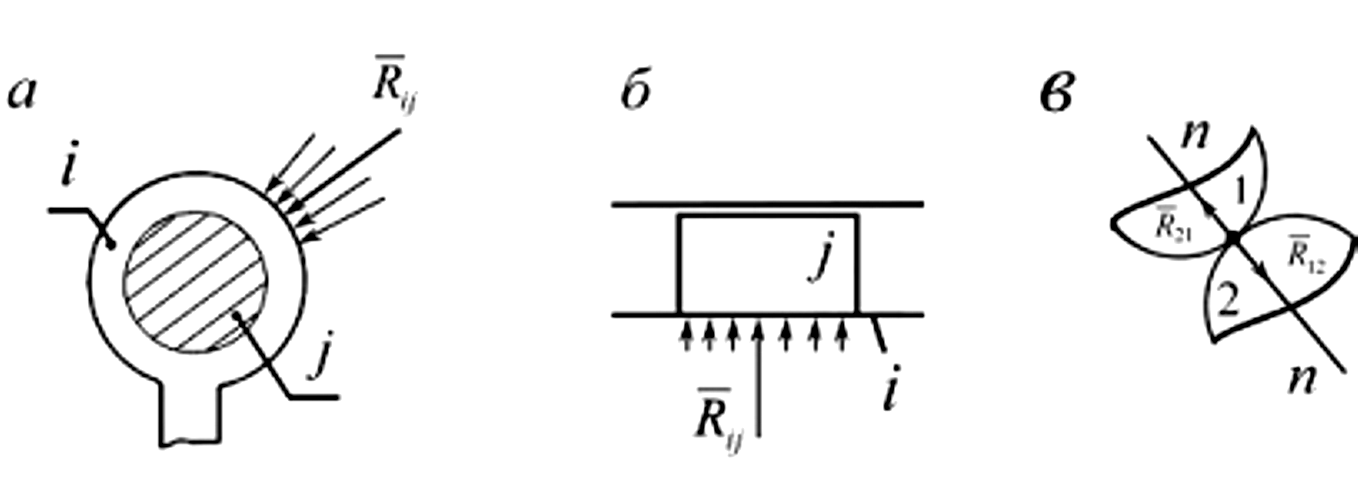
Рис.3.2. Реакции в кинематических парах
3.4. Пример определения реакций в механизме
Рассмотрим
пример определения реакций в кинематических
парах кривошипно-ползунного механизма
(рис.3.3). Предварительно строим планы
скоростей и ускорений в соответствующих
масштабах. Выделим в механизме
двухповодковую группу Ассура ( звенья
2-3) и начальное звено 1. К группе Ассура
приложим последовательно все внешние
силы, силы и моменты сил инерции и реакции
со стороны отброшенных звеньев и реакции
в связанных кинематических парах.
Внешние силы: силы тяжести
![]() и
и![]() прикладываем в центрах масс (точкиs2
и s3),
силу технологического сопротивления
прикладываем в центрах масс (точкиs2
и s3),
силу технологического сопротивления
![]() прикладываем к ведомому звену 3 (ползуну).
Силы и моменты сил инерции вычисляются
по формулам (3.1) и (3.2).
прикладываем к ведомому звену 3 (ползуну).
Силы и моменты сил инерции вычисляются
по формулам (3.1) и (3.2).
Составим сумму
моментов сил, действующих на 2-е звено
(рис.3.4,а):
![]() ,
,
откуда находим
величину реакции
![]() .
Направление её мы задали (рис.3.4,а). Если
при расчете
.
Направление её мы задали (рис.3.4,а). Если
при расчете![]() получаем со знаком ( – ), то это направление
учитывается, когда решается векторное
уравнение (
получаем со знаком ( – ), то это направление
учитывается, когда решается векторное
уравнение (![]() .
Плечи силh
измеряются
с чертежа в мм и умножаются на масштабный
коэффициент
.
Плечи силh
измеряются
с чертежа в мм и умножаются на масштабный
коэффициент
![]() ,
,![]() - длина звена в м.
- длина звена в м.
Запишем векторные уравнения сил, действующих на 2-е и 3-е звенья, а затем их суммируем. Имеем
![]() ,
,
![]() ,
,
![]() .
.
![]()
![]() (
(![]()
В последнем
уравнении содержится две неизвестные:
величины
![]() и
и![]() ,
которые можно определить, решая последнее
векторное уравнение графически. Для
этого строится план сил (рис.3.4,б).
,
которые можно определить, решая последнее
векторное уравнение графически. Для
этого строится план сил (рис.3.4,б).
Уравновешивающую
силу, приложенную к зубчатому колесу,
жестко связанному с начальным звеном,
(рис.3.5,а) найдем, рассматривая его
равновесие. Приложим все силы: реакцию
![]() в точкеА,
реакцию
в точкеА,
реакцию
![]() в точке О1
и уравновешивающую силу
в точке О1
и уравновешивающую силу
![]() в полюсеР
зацепления зубчатых колес 1 и 2, направленную
по линии зацепления N
– N.
Плечо действия этой силы относительно
т.О1
равно радиусу основной окружности 1-го
колеса rв = r1·cosα=(mz1/2)·cos20º.
в полюсеР
зацепления зубчатых колес 1 и 2, направленную
по линии зацепления N
– N.
Плечо действия этой силы относительно
т.О1
равно радиусу основной окружности 1-го
колеса rв = r1·cosα=(mz1/2)·cos20º.
Составим сумму моментов сил, действующих на начальное звено относительно точки О1 .
![]()
Отсюда находим
![]() .
Запишем векторную сумму сил для первого
звена
.
Запишем векторную сумму сил для первого
звена![]() 0
(рис.3.5,б) и из векторного многоугольника
определяем реакцию
0
(рис.3.5,б) и из векторного многоугольника
определяем реакцию![]() .
.
К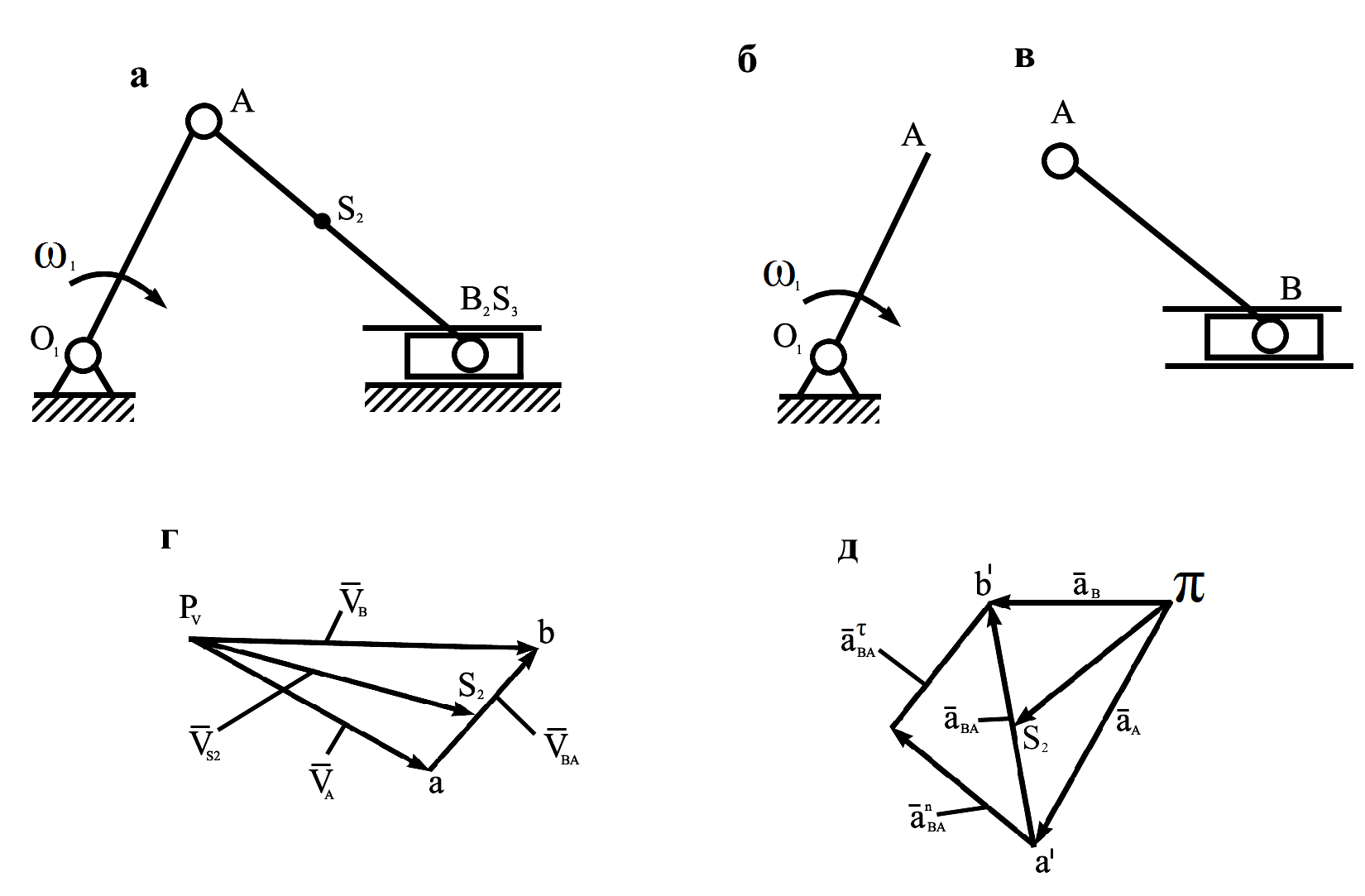 огда
начальное звено приводится в движение
от привода через муфту, то уравновешивающий
моментМур
(рис.3.6, а) равен Мур=
огда
начальное звено приводится в движение
от привода через муфту, то уравновешивающий
моментМур
(рис.3.6, а) равен Мур=
![]() ,
а реакция в опоре
,
а реакция в опоре![]() находится из решения векторного уравнения
(рис.3.6,б)
находится из решения векторного уравнения
(рис.3.6,б)![]() =0.
=0.
Рис.3.3. Кривошипно-ползунный механизм а – схема механизма, б – начальное звено, в – группа Ассура, г – план скоростей, д – план ускорений
Р ис.3.4.
Кинетостатика группы Ассура
ис.3.4.
Кинетостатика группы Ассура
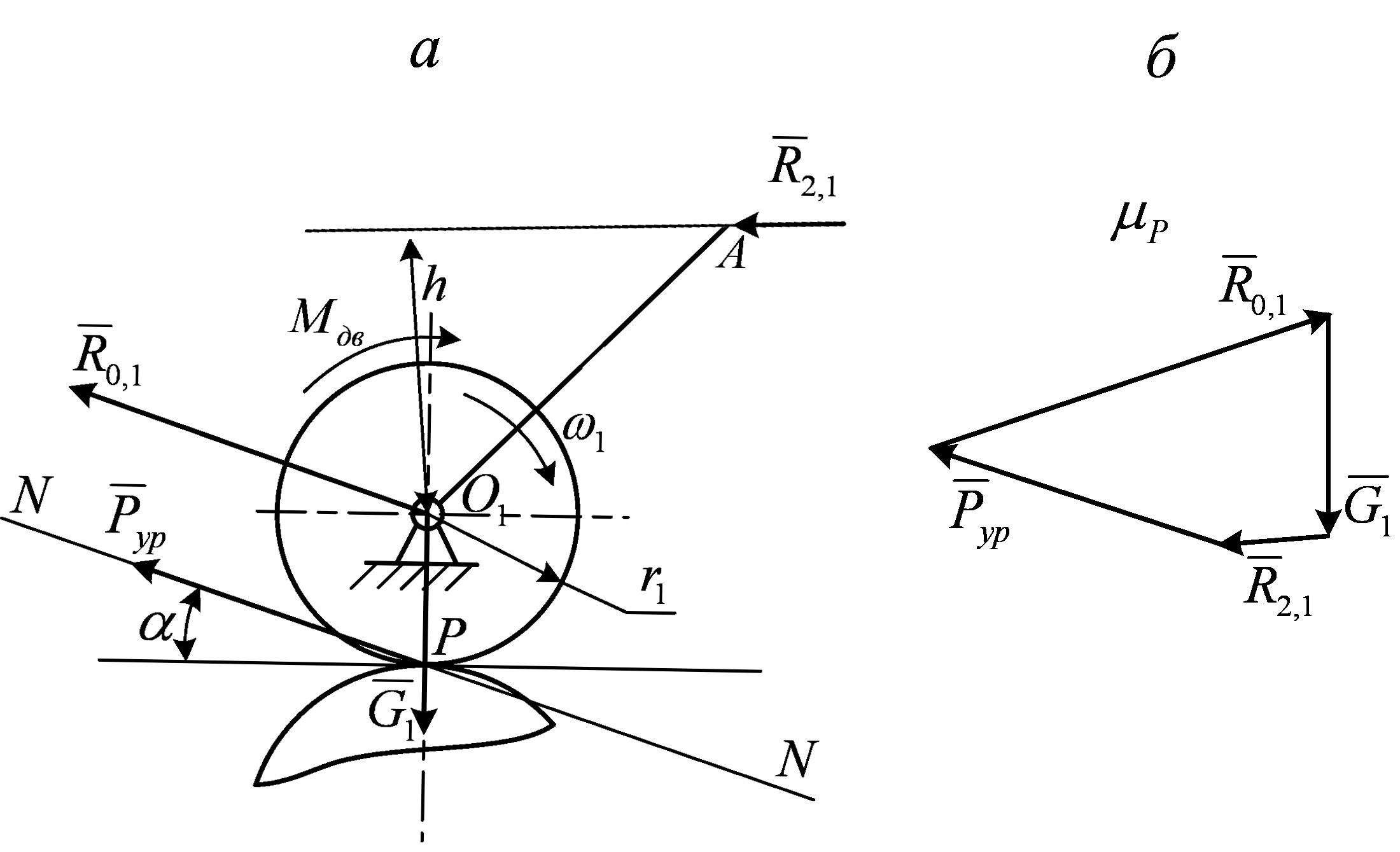
Рис.3.5. К определению уравновешивающей силы

Рис.3.6. К определению уравновешивающего момента