

Общие вопросы.
№1
Объекты управления делятся на устойчивые, нейтральные, неустойчивые в зависимости от:
1. Их поведения при возникновении возмущений.
2. Вида входного сигнала.
3. Их поведения после прекращения действия возмущения.
4. Вида их реакции на входной сигнал.
№2
Система автоматического управления включает в себя:
1. Объект управления и измерительный элемент.
2. Объект управления и управляющее устройство.
3. Управляющее устройство и органы воздействия на объект управления.
4. Объект управления и усилительный элемент.
№3
В системах с управлением по отклонению управляющее устройство решает задачу:
1.Измерения возмущающего воздействия и выработки регулирующего воздействия для его компенсации.
2. Измерения задающего воздействия и выработки на его основе регулирующего воздействия.
3. Устранения отклонения управляемой величины от задающей.
4. Измерения задающего и возмущающего воздействий и выработки с учетом этих измерений регулирующего воздействия.
№4
В системах с управлением по возмущению управляющее устройство решает задачу:
1.Измерения возмущающего воздействия и выработки регулирующего воздействия для его компенсации.
2. Измерения задающего воздействия и выработки на его основе регулирующего воздействия.
3. Устранения отклонения управляемой величины от задающей.
4. Измерения задающего и возмущающего воздействий и выработки с учетом этих измерений регулирующего воздействия.
№5
Функциональная схема САУ характеризует:
Функции отдельных элементов системы с учетом их физической природы.
Функции отдельных элементов системы вне зависимости от их конкретной реализации.
Последовательность соединения отдельных частей системы и их математическое описание.
Последовательность соединения отдельных частей системы и их конкретную реализацию.
№6
Какое из перечисленных ниже устройств не входит в функциональную схему линейной САУ:
1. Измерительное устройство.
2. Усилительное устройство.
3. Кодирующее устройство
4. Сравнивающее устройство.
№7
Какое из перечисленных ниже устройств предназначено для установления требуемого значения управляемой величины:
1. Измерительное устройство.
2. Усилительное устройство.
3. Задающее устройство.
4. Сравнивающее устройство.
№8
Какое из перечисленных ниже устройств предназначено для выработки воздействия, прикладываемого к регулирующему органу объекта управления
1. Измерительное устройство.
2. Усилительное устройство.
3. Исполнительное устройство.
4. Сравнивающее устройство.
№9
Какое из перечисленных ниже устройств предназначено для изменения свойств САУ в нужном проектировщику направлении
1. Измерительное устройство.
2. Корректирующее устройство.
3. Исполнительное устройство.
4. Сравнивающее устройство.
№10
Выделить воздействие, не входящее в число типовых при исследовании САУ :
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№11
На какие две группы в зависимости от причин возникновения можно разделить возмущающие воздействия:
1. Постоянные и переменные
2. Нагрузку и помехи
3. Гармонические и негармонические
4. Приложенные к входу объекта управления и к регулятору.
№12
В статической по отношению к задающему воздействию системе:
1. Выходной сигнал является постоянной величиной
2. Входной сигнал является постоянной величиной.
3. Установившееся отклонение регулируемой величины от требуемого значения
![]()
4. Установившееся отклонение регулируемой величины от требуемого значения
![]() .
.
№13
В астатической по отношению к задающему воздействию системе:
1. Выходной сигнал является постоянной величиной
2. Входной сигнал является постоянной величиной.
3. Установившееся отклонение регулируемой величины от требуемого значения
![]()
4. Установившееся отклонение регулируемой величины от требуемого значения
![]() .
.
№14
При каких условиях линейная стационарная
система будет астатической по отношению
к входному сигналу
![]() :
:
1. Если передаточная функция разомкнутой системы не имеет нулевых полюсов.
2. Если передаточная функция разомкнутой системы имеет один нулевой полюс первого порядка.
3. Если передаточная функция разомкнутой системы имеет один нулевой полюс второго порядка.
4. Таких условий нет – система не может быть астатической по отношению к данному сигналу.
№15
Перерегулирование определяется формулой:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№16
Системы делятся на системы стабилизации, программного регулирования, зависимого управления в зависимости от:
1. Числа регулируемых величин.
2. Установившегося значения сигнала ошибки.
3. Числа обратных связей в системе.
4. Информации о задающем воздействии.
№17
Системы делятся на статические и астатические в зависимости от:
1. Числа регулируемых величин.
2. Установившегося значения сигнала ошибки.
3. Числа обратных связей в системе.
4. Информации о задающем воздействии.
№18
Системы делятся на одномерные и многомерные в зависимости от:
1. Числа регулируемых величин.
2. Установившегося значения сигнала ошибки.
3. Числа обратных связей в системе.
4. Информации о задающем воздействии.
№19
Время
регулирования![]() -это время, по
истечении которого выполняется условие:
-это время, по
истечении которого выполняется условие:
1.![]()
![]() .
.
2.![]()
![]() .
.
3.
![]() .
.
4.
![]() .
.
№20
Из перечисленных ниже зависимостей исключите функцию, не входящую в число типовых входных воздействий для САУ:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№21
Если линейная система является
астатической по отношению к линейно
нарастающему входному сигналу
![]() ,
то она будет также астатической по
отношению к входному сигналу вида:
,
то она будет также астатической по
отношению к входному сигналу вида:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№22
Если линейная система является
астатической по отношению к линейно
нарастающему входному сигналу
![]() ,
то она будет также астатической по
отношению к входному сигналу вида:
,
то она будет также астатической по
отношению к входному сигналу вида:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
Дифференциальные уравнения. Свободные и вынужденные движения.
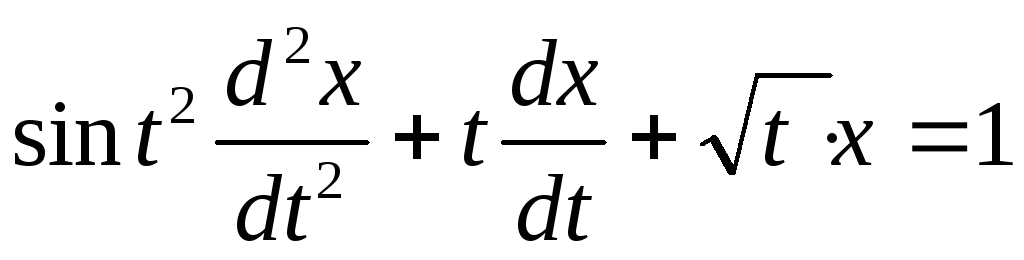
№23
Указать, какие из приведенных дифференциальных уравнений являются линейными:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№24
Указать, какие из приведенных дифференциальных уравнений являются линейными:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
 .
.
№25
Указать, какие из приведенных дифференциальных уравнений являются линейными:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
 .
.
№26
Уравнение, связывающее вход
![]() и выход
и выход
![]() системы имеет вид
системы имеет вид
![]() .
Заданы некоторые начальные условия.
Как можно поступить для определения
.
Заданы некоторые начальные условия.
Как можно поступить для определения
![]() ,
если входной сигнал представляет
собой сумму двух воздействий
-
,
если входной сигнал представляет
собой сумму двух воздействий
-
![]() :
:
1. Найти отдельно
реакции на начальные условия, сигнал
![]() ,сигнал
,сигнал
![]() исложить три
полученные реакции.
исложить три
полученные реакции.
2. Найти реакцию на
![]() при заданных начальных условиях,
потом реакцию на сигнал
при заданных начальных условиях,
потом реакцию на сигнал
![]() при тех же начальных условиях и
полученные две реакции сложить.
при тех же начальных условиях и
полученные две реакции сложить.
3. Расчленение реакции системы на отдельные слагаемые невозможно, можно только решать исходное уравнение.
4. Найти реакцию на
![]() при нулевых начальных условиях,
потом реакцию на сигнал
при нулевых начальных условиях,
потом реакцию на сигнал
![]() при нулевых начальных условиях и
полученные две реакции сложить.
при нулевых начальных условиях и
полученные две реакции сложить.
№27
Уравнение, связывающее вход
![]() и выход
и выход
![]() системы имеет вид
системы имеет вид
![]() .
Начальные условия нулевые. Входной
сигнал представляет собой сумму двух
воздействий -
.
Начальные условия нулевые. Входной
сигнал представляет собой сумму двух
воздействий -
![]() .
Решение уравнения при входном
сигнале
.
Решение уравнения при входном
сигнале
![]() обозначим через
обозначим через
![]() ,
при входном сигнале
,
при входном сигнале
![]() - через
- через![]() .
Как определится решение уравнения
при входном сигнале
.
Как определится решение уравнения
при входном сигнале![]() :
:
1.
![]() +
+![]()
2.
![]() -
-![]()
3.
![]()
![]()
![]() (свертка функций
(свертка функций![]() и
и![]() )
)
4.
![]()
![]()
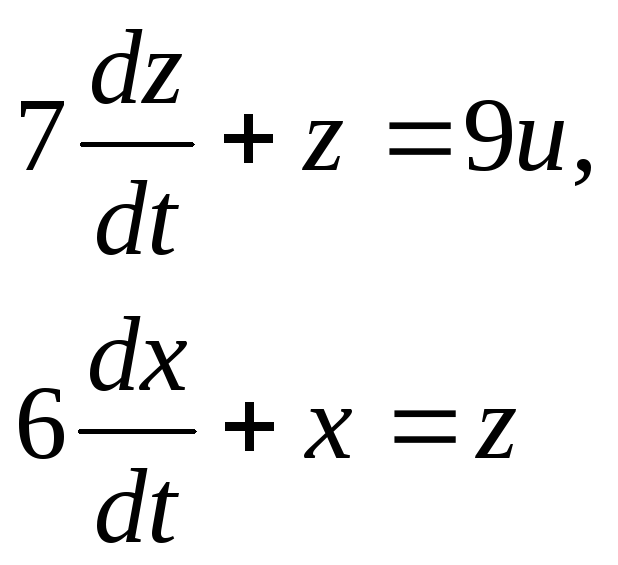
№28
В результате поэлементного описания получена система дифференциальных уравнений
 .
.
Здесь
![]() -
вход,
-
вход,![]() -
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
-
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
1.
![]() .
.
2.
![]()
3.
![]()
4.
![]() .
.
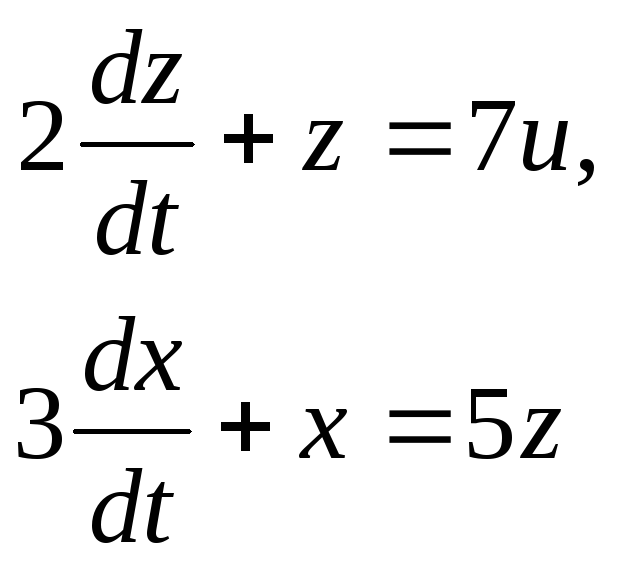
№29
В результате поэлементного описания получена система дифференциальных уравнений
 .
.
Здесь
![]() -
вход,
-
вход,![]() -
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
-
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
1.
![]() .
.
2.
![]()
3.
![]()
4.
![]() .
.
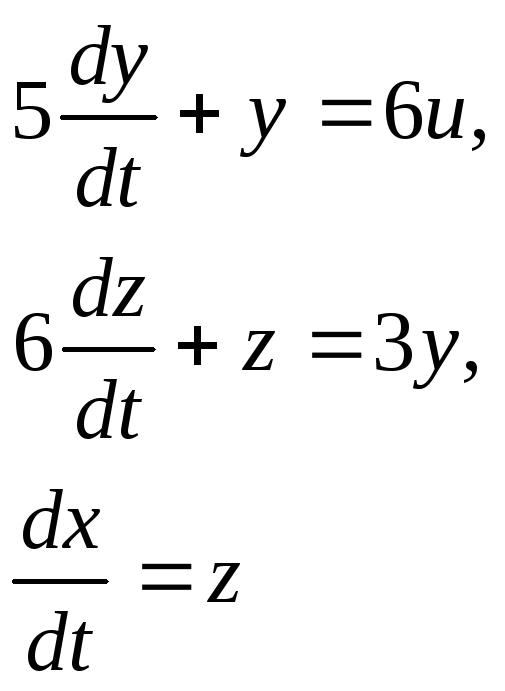
№30
В результате поэлементного описания получена система дифференциальных уравнений
 .
.
Здесь
![]() -
вход,
-
вход,![]() -
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
-
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№31
В результате поэлементного описания получена система дифференциальных уравнений
 .
.
Здесь
![]() -
вход,
-
вход,![]() -
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
-
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
1.
![]() .
.
2.
![]()
3.
![]()
4.
![]() .
.
№32
В результате поэлементного описания получена система дифференциальных уравнений
 .
.
Здесь
![]() -
вход,
-
вход,![]() -
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
-
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
1.
![]() .
.
2.
![]()
3.
![]()
4.
![]() .
.
№33
В результате поэлементного описания получена система дифференциальных уравнений
 .
.
Здесь
![]() -
вход,
-
вход,![]() -
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
-
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
1.
![]() .
.
2.
![]()
3.
![]()
4.
![]() .
.
№34
В результате поэлементного описания получена система дифференциальных уравнений
 .
.
Здесь
![]() -
вход,
-
вход,![]() -
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
-
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
1.
![]() .
.
2.
![]()
3.
![]()
4.
![]() .
.
№35
В результате поэлементного описания получена система дифференциальных уравнений
 .
.
Здесь
![]() -
вход,
-
вход,![]() -
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
-
выход системы. Как будет выглядеть
дифференциальное уравнение, разрешенное
относительно выходной переменной:
1.
![]() .
.
2.
![]()
3.
![]()
4.
![]() .
.
№36
Найти решение дифференциального уравнения
![]() ,
,
![]() .
.
1.
![]()
2 .![]()
3.
![]()
4.
![]()
№37
Найти решение дифференциального уравнения
![]() ,
,
![]() .
.
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№38
Найти решение дифференциального уравнения
![]() ,
,
![]()
1.
![]()
2.
![]() ?
?
3.
![]()
4.
![]() .
.
№39
Найти решение дифференциального уравнения
![]() ,
,
![]() ,
,![]() .
.
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№40
Найти решение дифференциального уравнения
![]() ,
,
![]() .
.
1.
![]()
2 .![]()
3.
![]()
4.
![]() .
.
№41
Найти решение дифференциального уравнения
![]() ,
,
![]() ,
,![]() .
.
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№42
Найти решение дифференциального уравнения
![]() ,
,
![]() ,
,![]() .
.
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№43
Дифференциальное уравнение САУ имеет вид
![]() .
При каких входных сигналах
.
При каких входных сигналах![]() в решении
в решении![]() или его производной
или его производной![]() в момент времениt=0 будут
возникать скачки (разрывы 1-го рода):
в момент времениt=0 будут
возникать скачки (разрывы 1-го рода):
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№44
Дифференциальное уравнение САУ имеет вид
![]() .
При каких входных сигналах
.
При каких входных сигналах![]() в решении
в решении![]() или его производной
или его производной![]() в момент времениt=0 будут
возникать скачки (разрывы 1-го рода):
в момент времениt=0 будут
возникать скачки (разрывы 1-го рода):
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№45
Дифференциальное уравнение САУ имеет вид
![]() .
При каких входных сигналах
.
При каких входных сигналах![]() в решении
в решении![]() или его производной
или его производной![]() в момент времениt=0 будут
возникать скачки (разрывы 1-го рода):
в момент времениt=0 будут
возникать скачки (разрывы 1-го рода):
![]()
![]()
![]()
![]() .
.
№46
Вынужденное движение САУ – это:
1. Движение, возникающее при наличии входного сигнала и определяемое полюсами изображения по Лапласу входного сигнала.
2. Движение, определяемое наличием ненулевых начальных условий.
3. Движение, возникающее при наличии входного сигнала и определяемое полюсами передаточной функции САУ.
4. Движение, возникающее при одновременном наличии входного сигнала и ненулевых начальных условий и определяемое полюсами передаточной функции САУ.
№47
Свободная составляющая процесса регулирования – это:
1. Движение, возникающее при наличии входного сигнала и определяемое полюсами изображения по Лапласу входного сигнала.
2. Движение, определяемое наличием ненулевых начальных условий.
3. Движение, возникающее при наличии входного сигнала и определяемое полюсами передаточной функции САУ.
4. Движение, возникающее при одновременном наличии входного сигнала и ненулевых начальных условий и определяемое полюсами передаточной функции САУ.
№48
Собственная сопровождающая составляющая процесса регулирования – это:
1. Движение, возникающее при наличии входного сигнала и определяемое полюсами изображения по Лапласу входного сигнала.
2. Движение, определяемое наличием ненулевых начальных условий.
3. Движение, возникающее при наличии входного сигнала и определяемое полюсами передаточной функции САУ.
4. Движение, возникающее при одновременном наличии входного сигнала и ненулевых начальных условий и определяемое полюсами передаточной функции САУ.
№49
Собственное движение системы – это:
1. Сумма свободной и собственно сопровождающей составляющих общего процесса.
2. Сумма свободной и вынужденной составляющих.
3. Сумма вынужденной и собственно сопровождающей составляющих.
4. Движение, определяемое наличием входного сигнала.
№50
Свободное движение системы зависит:
1. От входного сигнала.
2. От входного сигнала и начальных условий.
3. От начальных условий.
4. Не зависит ни от входного сигнала, ни от начальных условий.
№51
Собственное движение системы зависит:
1. От входного сигнала.
2. От входного сигнала и начальных условий.
3. От начальных условий.
4. Не зависит ни от входного сигнала, ни от начальных условий.
№52
Вынужденное движение системы зависит:
1. От входного сигнала.
2. От входного сигнала и начальных условий.
3. От начальных условий.
4. Не зависит ни от входного сигнала, ни от начальных условий.
№53
В устойчивой системе:
1. При
![]() вынужденное движение стремится к нулю
вынужденное движение стремится к нулю
2. Вынужденное движение ограниченно при любых входных воздействиях.
3. При
![]() свободная составляющая движения
стремится к нулю.
свободная составляющая движения
стремится к нулю.
4. При
![]() собственно сопровождающая составляющая
совпадает с вынужденным движением.
собственно сопровождающая составляющая
совпадает с вынужденным движением.
№54
Устойчивая система находится под
воздействием входного сигнала
![]() .
Управляемая величина -
.
Управляемая величина -![]() .
Установившееся движение определяется
выражением
.
Установившееся движение определяется
выражением![]() .
С каким движением совпадает
.
С каким движением совпадает![]() :
:
1. С входным сигналом
![]()
2. Со свободным движением системы.
3. С собственным сопровождающим движением системы.
4. С вынужденным движением системы.
№55
Уравнение системы имеет вид
![]() .
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает свободное движение
системы:
.
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает свободное движение
системы:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№56
Уравнение системы имеет вид
![]() .
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает вынужденное движение
системы:
.
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает вынужденное движение
системы:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№57
Уравнение системы имеет вид
![]() .
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает вынужденное движение
системы:
.
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает вынужденное движение
системы:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№58
Уравнение системы имеет вид
![]() .
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает свободное движение
системы:
.
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает свободное движение
системы:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№59
Уравнение системы имеет вид
![]() .
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает решение уравнения:
.
Найти изображение по Лапласу выходной
величины и определить, какая из
зависимостей задает решение уравнения:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№60
Передаточная функция САУ имеет вид
![]() .
Входной сигнал
.
Входной сигнал
![]() .
В выходном сигнале системы
.
В выходном сигнале системы![]() выделим составляющую
выделим составляющую![]() ,
определяемую зависимостью
,
определяемую зависимостью![]() .
Составляющая
.
Составляющая![]() задает:
задает:
1. Входной сигнал
![]() =
=![]() .
.
2. Свободную составляющую процесса
![]() .
.
3. Вынужденную составляющую процесса
![]() .
.
4. В процессе
![]() такой составляющей нет.
такой составляющей нет.
№61
Передаточная функция САУ имеет вид
![]() .
Входной сигнал
.
Входной сигнал![]() .
В выходном сигнале системы
.
В выходном сигнале системы![]() выделим составляющую
выделим составляющую![]() ,
определяемую зависимостью
,
определяемую зависимостью![]() .
Составляющая
.
Составляющая![]() задает:
задает:
1. Входной сигнал
![]() =
=![]() .
.
2. Свободную составляющую
процесса
![]() .
.
3. Вынужденную составляющую процесса
![]() .
.
4. В процессе
![]() такой составляющей нет.
такой составляющей нет.
№62
Передаточная функция САУ имеет вид
![]() .
Входной сигнал
.
Входной сигнал![]() .
Тогда при нулевых начальных условиях
.
Тогда при нулевых начальных условиях![]() .
В выходном сигнале системы
.
В выходном сигнале системы![]() выделим составляющую
выделим составляющую![]() ,
определяемую зависимостью
,
определяемую зависимостью![]() .
Составляющая
.
Составляющая![]() задает:
задает:
1. Собственно
сопровождающую составляющую процесса
![]() .
.
2. Свободную составляющую процесса
![]() .
.
3. Вынужденную составляющую процесса
![]() .
.
4. В процессе
![]() такой составляющей нет.
такой составляющей нет.
№63
Передаточная функция САУ имеет вид
![]() .
Входной сигнал
.
Входной сигнал![]() .
Тогда при нулевых начальных условиях
.
Тогда при нулевых начальных условиях![]() .
В выходном сигнале системы
.
В выходном сигнале системы![]() выделим составляющую
выделим составляющую![]() ,
определяемую зависимостью
,
определяемую зависимостью![]() .
Составляющая
.
Составляющая![]() задает:
задает:
1. Собственно сопровождающую составляющую
процесса
![]() .
.
2. Свободную составляющую процесса
![]() .
.
3. Вынужденную
составляющую процесса![]() .
.
4. В процессе
![]() такой составляющей нет.
такой составляющей нет.
№64
Передаточная функция системы имеет вид
![]() .
Входной сигнал
.
Входной сигнал![]() .
Какой из зависимостей определяется
общий вид собственного движения системы:
.
Какой из зависимостей определяется
общий вид собственного движения системы:
1.
![]()
2.
![]()
3.
![]()
4.
![]() В
ответах 1-4
В
ответах 1-4![]() - некоторые числа.
- некоторые числа.
№65
Передаточная функция системы имеет вид
![]() .
Входной сигнал
.
Входной сигнал![]() .
Какой из зависимостей определяется
общий вид свободного движения системы:
.
Какой из зависимостей определяется
общий вид свободного движения системы:
1.
![]()
2.
![]()
3.
![]()
4.
![]() В ответах 1-4
В ответах 1-4![]() - некоторые числа.
- некоторые числа.
№66
Передаточная функция системы имеет вид
![]() .
Входной сигнал
.
Входной сигнал![]() .
Какой из зависимостей определяется
общий вид собственного движения системы:
.
Какой из зависимостей определяется
общий вид собственного движения системы:
1.
![]()
2.
![]()
3.
![]()
4.
![]() В
ответах 1-4
В
ответах 1-4![]() - некоторые числа.
- некоторые числа.
№67
В устойчивой системе при наличии входного сигнала:
1. При
![]() вынужденное движение стремится к нулю
вынужденное движение стремится к нулю
2. Вынужденное движение ограниченно при любых входных воздействиях.
3. При
![]() собственное движение стремится к нулю.
собственное движение стремится к нулю.
Вынужденное движение отсутствует.
Передаточная функция, временные характеристики.
№1
Передаточная функция системы – это:
1. Отношение изображения по Лапласу входного сигнала к изображению выходного при нулевых начальных условиях
2. Произведение изображений по Лапласу входного и выходного сигналов при нулевых начальных условиях
3. Отношение изображения по Лапласу выходного сигнала к изображению входного при нулевых начальных условиях
4. Отношение изображения по Лапласу входного сигнала к изображению выходного при ненулевых начальных условиях
№2
Передаточная функция системы зависит:
1. Только от параметров входного сигнала.
2. Только от структуры и параметров системы.
3. И от вида входного сигнала и от структуры и параметров системы.
4. Не зависит ни от входного сигнала, ни от структуры и параметров системы.
№3
Дифференциальное уравнение системы имеет вид
![]() .
.![]() и
и![]() соответственно вход и выход системы.
Передаточная функция данной системы
имеет вид:
соответственно вход и выход системы.
Передаточная функция данной системы
имеет вид:
1.![]() .
.
2.
 .
.
3.
 .
.
4.
 .
.
№4
Дифференциальное уравнение САУ имеет
вид
![]() ,
,![]() -
вход,
-
вход,![]() - выход системы,
- выход системы,![]()
![]() .
Передаточная функция САУ имеет вид:
.
Передаточная функция САУ имеет вид:
1.
![]() .
.
2.
![]() .
.
3.
![]()
4.
![]() .
.
№5
Дифференциальное уравнение САУ имеет
вид
![]() ,
,![]() -
вход,
-
вход,![]() - выход системы,
- выход системы,![]()
![]() .
Передаточная функция САУ имеет вид:
.
Передаточная функция САУ имеет вид:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№6
Передаточная функция имеет вид
![]() ,
,![]() - выходной сигнал,
- выходной сигнал,![]() -
входной сигнал. Соответствующее
дифференциальное уравнение имеет вид:
-
входной сигнал. Соответствующее
дифференциальное уравнение имеет вид:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№7
При последовательном соединении звеньев
с передаточными функциями
![]() эквивалентная передаточная функция
эквивалентная передаточная функция![]() равна:
равна:
1.![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№8
При параллельном соединении звеньев с
передаточными функциями
![]() эквивалентная передаточная функция
эквивалентная передаточная функция![]() равна:
равна:
1.![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№9
Передаточная функция имеет вид
![]() ,
,![]() - выходной сигнал,
- выходной сигнал,![]() -
входной сигнал,
-
входной сигнал,![]() .
Соответствующее дифференциальное
уравнение имеет вид:
.
Соответствующее дифференциальное
уравнение имеет вид:
1.
![]() .
.
2.
![]()
3.
![]()
4.
![]()
№10
Передаточная функция разомкнутой САУ имеет вид:
 .
Для того, чтобы система обладала
астатизмом первого порядка должно
выполняться условие:
.
Для того, чтобы система обладала
астатизмом первого порядка должно
выполняться условие:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]() .
.
№11
Передаточная функция разомкнутой САУ
имеет вид
![]() .
Чему равен коэффициент передачи
разомкнутой САУ:
.
Чему равен коэффициент передачи
разомкнутой САУ:
1. 2
2. 0,2
3. 10
4. 5
№12
Дифференциальное уравнение САУ имеет
вид
![]() ,
,![]() - входной сигнал,
- входной сигнал,![]() .
.
Передаточная функция САУ имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№13
Имеем замкнутую систему с единичной
отрицательной обратной связью.
![]() - передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по задающему воздействию
- передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по задающему воздействию![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№14
Имеем замкнутую систему с положительной
единичной обратной связью.
![]() - передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по задающему воздействию
- передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по задающему воздействию![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№15
Имеем замкнутую систему с отрицательной
единичной обратной связью.
![]() - передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке
- передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№16
Имеем замкнутую систему с положительной
единичной обратной связью.
![]() - передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке
- передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№17
Передаточная функция разомкнутой САУ
имеет вид
![]() .
Чему равен порядок астатизма данной
системы:
.
Чему равен порядок астатизма данной
системы:
1. 23. 3
2. 0 4. 1.
№18
Дифференциальное уравнение системы
имеет вид
![]() .
Здесь
.
Здесь![]() - задающее воздействие,
- задающее воздействие,![]() - возмущающее воздействие. Передаточная
функция системы по задающему воздействию
- возмущающее воздействие. Передаточная
функция системы по задающему воздействию![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№19
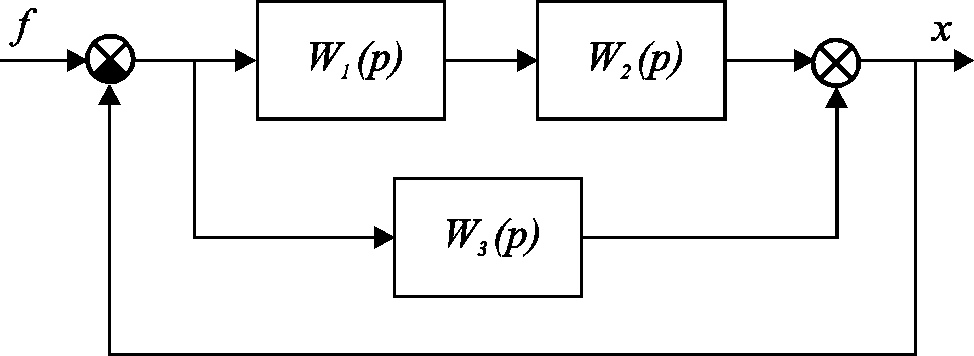
Эквивалентная передаточная функция соединения
имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№20
Эквивалентная передаточная функция соединения
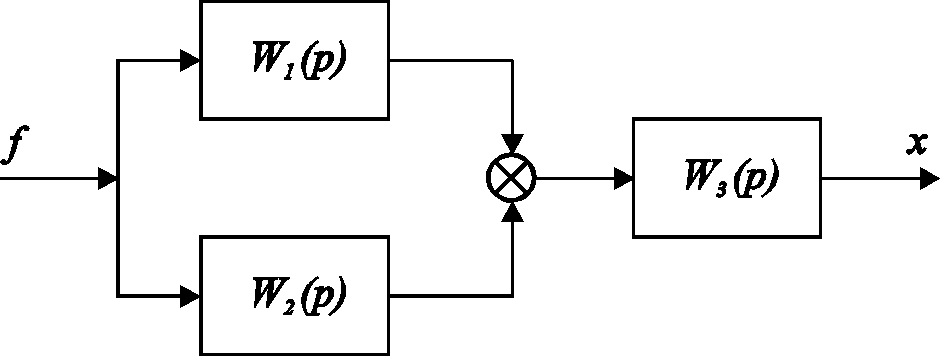
имеет вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№21
Эквивалентная передаточная функция соединения
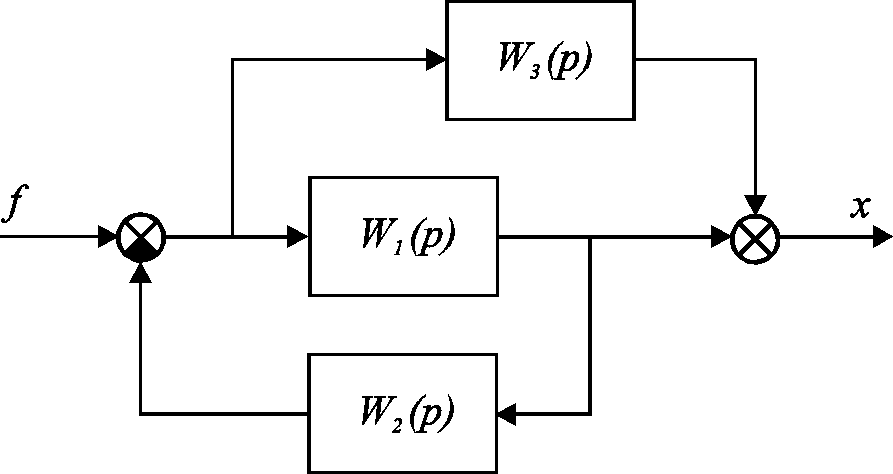
имеет вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
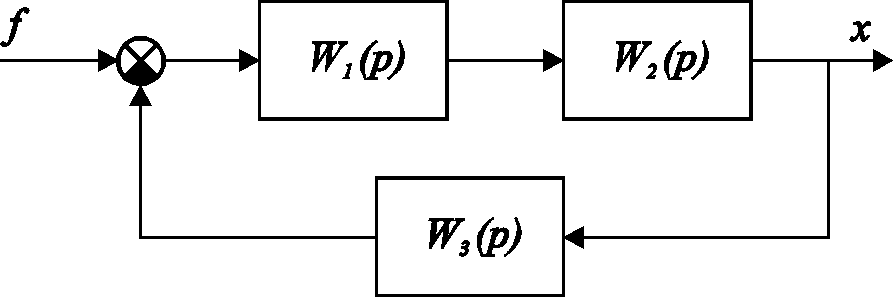
№22
Структурная схема замкнутой системы имеет вид
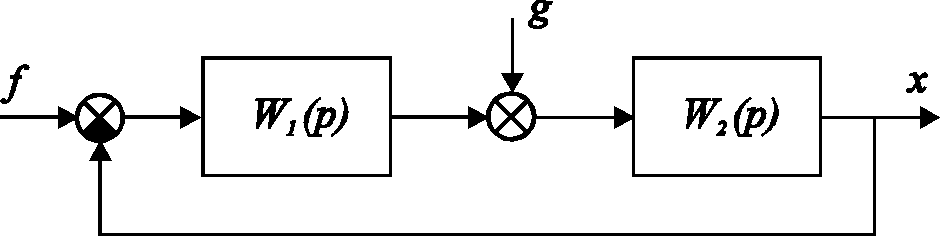 .
.
Передаточная функция замкнутой системы
по возмущающему воздействию
![]() имеет вид:
имеет вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№23
Переходная функция звена
![]() - это:
- это:
1. Переходный процесс
на выходе звена при подаче на его вход
функции
![]() и нулевых начальных условиях.
и нулевых начальных условиях.
2. Переходный процесс на выходе звена
при подаче на его вход функции
![]() и нулевых начальных условиях.
и нулевых начальных условиях.
3. Переходный процесс на выходе звена в отсутствие входного сигнала при единичных начальных условиях.
4. Переходный процесс на выходе звена
при подаче на его вход единичного
импульса
![]() и нулевых начальных условиях.
и нулевых начальных условиях.
№24
Импульсная переходная функция звена
![]() - это:
- это:
1. Переходный процесс на выходе звена
при подаче на его вход функции
![]() и нулевых начальных условиях.
и нулевых начальных условиях.
2. Переходный процесс
на выходе звена при подаче на его вход
функции
![]() и нулевых начальных условиях.
и нулевых начальных условиях.
3. Переходный процесс на выходе звена в отсутствие входного сигнала при единичных начальных условиях.
4. Переходный процесс на выходе звена
при подаче на его вход единичного
импульса
![]() и нулевых начальных условиях.
и нулевых начальных условиях.
№25
Весовая характеристика звена – это другое название:
1. Передаточной функции. 3. Импульсной переходной функции.
2. Переходной функции. 4. Дельта-функции.
№26
Связь между импульсной переходной
функцией
![]() и переходной функцией
и переходной функцией![]() определяется
зависимостью:
определяется
зависимостью:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]()
№27
Связь между переходной функцией
![]() и импульсной переходной функцией
и импульсной переходной функцией![]() определяется зависимостью:
определяется зависимостью:
1.
![]()
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№28
Связь между передаточной функцией звена
![]() и его импульсной переходной функцией
и его импульсной переходной функцией![]() определяется уравнением:
определяется уравнением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№29
Связь между передаточной функцией звена
![]() и его переходной функцией
и его переходной функцией![]() определяется уравнением:
определяется уравнением:
1.
![]() 3.
3.![]()
2.![]() 4.
4.![]() .
.
№30
Переходная характеристика безынерционного
звена с передаточной функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№31
Импульсная переходная функция
безынерционного звена с передаточной
функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№32
Переходная характеристика интегрирующего
звена с передаточной функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№33
Импульсная переходная функция
интегрирующего звена с передаточной
функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№34
Импульсная переходная функция звена с
передаточной функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№35
Переходная функция звена с передаточной
функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№36
Два звена с импульсными переходными
функциями
![]() и
и![]() образуют последовательное соединение.
Импульсная переходная функция
образуют последовательное соединение.
Импульсная переходная функция![]() всего соединения связана с импульсными
переходными функциями
всего соединения связана с импульсными
переходными функциями![]() и
и![]() следующим образом:
следующим образом:
1.
![]() .
.
2.
![]()
3.
![]() .
.
4.
![]() .
.
№37
Два звена с импульсными переходными
функциями
![]() и
и![]() образуют параллельное соединение.
Импульсная переходная функция
образуют параллельное соединение.
Импульсная переходная функция![]() всего соединения связана с импульсными
переходными функциями
всего соединения связана с импульсными
переходными функциями![]() и
и![]() следующим образом:
следующим образом:
1.
![]() .
.
2.
![]()
3.
![]() .
.
4.
![]() .
.
№38
Импульсная переходная функция звена с
передаточной функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№39
Переходная характеристика звена с
передаточной функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№40
В линейной системе:
![]() ее передаточная функция,
ее передаточная функция,![]() - соответственно входной и выходной
сигналы,
- соответственно входной и выходной
сигналы,![]() -
переходная характеристика,
-
переходная характеристика,![]() -
импульсная переходная функция. Начальные
условия нулевые. Какое из уравнений
правильно отражает связь между
-
импульсная переходная функция. Начальные
условия нулевые. Какое из уравнений
правильно отражает связь между![]() и
и![]() :
:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№41
В линейной системе:
![]() ее передаточная функция,
ее передаточная функция,![]() - соответственно входной и выходной
сигналы,
- соответственно входной и выходной
сигналы,![]() -
переходная характеристика,
-
переходная характеристика,![]() -
импульсная переходная функция. Начальные
условия нулевые. Какое из уравнений
правильно отражает связь между введенными
характеристиками:
-
импульсная переходная функция. Начальные
условия нулевые. Какое из уравнений
правильно отражает связь между введенными
характеристиками:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№42
Переходная характеристика звена с
передаточной функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№43
Импульсная переходная функция звена с
передаточной функцией
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№44
В линейной системе:
![]() ее передаточная функция,
ее передаточная функция,![]() - соответственно входной и выходной
сигналы,
- соответственно входной и выходной
сигналы,![]() -
переходная характеристика,
-
переходная характеристика,![]() -
импульсная переходная функция. Начальные
условия нулевые. Какое из уравнений
правильно отражает связь между введенными
характеристиками:
-
импульсная переходная функция. Начальные
условия нулевые. Какое из уравнений
правильно отражает связь между введенными
характеристиками:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№45
Переходная характеристика звена с
передаточной функцией
![]() имеет вид:
имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№46
Переходная характеристика звена с
передаточной функцией
![]() имеет вид:
имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№47
Импульсная переходная функция звена с
передаточной функцией
![]() имеет вид:
имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№48
В линейной системе:
![]() ее передаточная функция,
ее передаточная функция,![]() - соответственно входной и выходной
сигналы. Начальные условия нулевые.
Какое из уравнений правильно отражает
связь между введенными характеристиками:
- соответственно входной и выходной
сигналы. Начальные условия нулевые.
Какое из уравнений правильно отражает
связь между введенными характеристиками:
![]()
![]()
![]()
![]()
№49
Имеем замкнутую систему с отрицательной
единичной обратной связью.
![]() - передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке
- передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
3.
![]() 4.
4.![]() .
.
№50
Имеем замкнутую систему с отрицательной
единичной обратной связью.
![]() - передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по задающему воздействию
- передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по задающему воздействию![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
3.
![]() 4.
4.
![]() .
.
№51
Имеем замкнутую систему с отрицательной
единичной обратной связью.
![]() - передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке
- передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№52
Имеем замкнутую систему с отрицательной
единичной обратной связью.
![]() - передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по задающему воздействию
- передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по задающему воздействию![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№53
Передаточная функция линейной системы
имеет вид
![]() .
Данная система может состоять из:
.
Данная система может состоять из:
1. Параллельно соединенных форсирующего и колебательного звеньев.
2. Последовательно соединенных дифференцирующего и двух апериодических звеньев.
3. Параллельно соединенных двух апериодических звеньев.
4. Последовательно соединенных консервативного и двух апериодических звеньев.
№54
Передаточная функция линейной системы
имеет вид
![]() .
Данная система состоит из:
.
Данная система состоит из:
1. Последовательно соединенных форсирующего и колебательного звеньев.
2. Последовательно соединенных форсирующего и двух апериодических звеньев.
3. Последовательно соединенных трех апериодических звеньев.
4. Последовательно соединенных консервативного и двух апериодических звеньев.
№55
Передаточная функция линейной системы
имеет вид
![]() .
Данная система состоит из:
.
Данная система состоит из:
1. Последовательно соединенных апериодического и колебательного звеньев.
2. Последовательно соединенных двух апериодических звеньев.
3. Колебательного звена.
4. Последовательно соединенных консервативного и апериодического звеньев.
№56
Передаточная функция линейной системы
имеет вид
![]() .
Данная система состоит из:
.
Данная система состоит из:
1. Последовательно соединенных апериодического и колебательного звеньев.
2. Последовательно соединенных двух апериодических звеньев.
3. Колебательного звена.
4. Последовательно соединенных консервативного и апериодического звеньев.
№57
В линейной САУ:
![]() ее передаточная функция,
ее передаточная функция,![]() - соответственно входной и выходной
сигналы,
- соответственно входной и выходной
сигналы,![]() - их изображения по Лапласу. Как связаны
- их изображения по Лапласу. Как связаны![]() ,
,![]() :
:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№58
Эквивалентная передаточная функция соединения

имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№59
Эквивалентная передаточная функция соединения

имеет вид:
1.
![]() 3.
3.![]()
2.![]() 4.
4.![]()
№60
Эквивалентная передаточная функция соединения
имеет вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№61
Передаточная функция линейной системы
имеет вид:
![]() .
Чему равны постоянные времени звеньев,
входящих в эту передаточную функцию:
.
Чему равны постоянные времени звеньев,
входящих в эту передаточную функцию:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№62
Имеем замкнутую систему с отрицательной
единичной обратной связью.
![]() - передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке
- передаточная функция разомкнутой
системы. Передаточная функция замкнутой
системы по ошибке![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№63
Передаточная функция системы по входному
сигналу имеет вид:
![]() .
Входной сигнал
.
Входной сигнал![]() .
Выходной сигнал при нулевых начальных
условиях имеет вид:
.
Выходной сигнал при нулевых начальных
условиях имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№64
Передаточная функция системы по входному
сигналу имеет вид:
![]() .
Входной сигнал
.
Входной сигнал![]() .
Выходной сигнал при нулевых начальных
условиях имеет вид:
.
Выходной сигнал при нулевых начальных
условиях имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]()
№65
Передаточная функция системы по входному
сигналу имеет вид:
![]() .
Входной сигнал
.
Входной сигнал![]() .
Выходной сигнал при нулевых начальных
условиях имеет вид:
.
Выходной сигнал при нулевых начальных
условиях имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]()
№66
Передаточная функция колебательного
звена имеет вид:
![]() .
Чему равны параметры этого звена:
.
Чему равны параметры этого звена:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№67
Передаточная функция колебательного
звена имеет вид:
![]() .
Чему равны параметры этого звена:
.
Чему равны параметры этого звена:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№68
Передаточная функция системы по входному
сигналу имеет вид:
![]() .
Входной сигнал
.
Входной сигнал![]() .
Выходной сигнал при нулевых начальных
условиях имеет вид:
.
Выходной сигнал при нулевых начальных
условиях имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№69
Передаточная функция системы по входному
сигналу имеет вид:
![]() .
Входной сигнал
.
Входной сигнал![]() .
Выходной сигнал при нулевых начальных
условиях имеет вид:
.
Выходной сигнал при нулевых начальных
условиях имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№ 1
Вынужденный процесс САУ при входном
сигнале
![]() представляет собой:
представляет собой:
1. Гармонический сигнал той же частоты, отличающийся от входного амплитудой и фазой.
2. Сумму гармонических сигналов с
частотами
![]()
3. Сумму гармонических сигналов с
частотами
![]()
4. Некоторый периодический сигнал, отличающийся от гармонического.
№ 2
Входной сигнал системы
![]() .
Установившийся процесс на выходе имеет
вид
.
Установившийся процесс на выходе имеет
вид![]() .
.![]() - передаточная функция системы. Связь
между величинами
- передаточная функция системы. Связь
между величинами![]() и
и![]() определяется соотношением:
определяется соотношением:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 3
Входной сигнал системы
![]() .
Установившийся процесс на выходе имеет
вид
.
Установившийся процесс на выходе имеет
вид![]() .
.![]() - передаточная функция системы. Связь
между величинами
- передаточная функция системы. Связь
между величинами![]() и
и![]() определяется соотношением:
определяется соотношением:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 4
Входной сигнал системы
![]() .
Установившийся процесс на выходе имеет
вид
.
Установившийся процесс на выходе имеет
вид![]() .
.![]() - передаточная функция системы.
- передаточная функция системы.![]() ,
,![]() .
Чему равно значение АЧХ системы на
данной частоте:
.
Чему равно значение АЧХ системы на
данной частоте:
1. 12
2. 20
3. 8
4. 5
№ 5
Передаточная функция системы -
![]() .
АФЧХ данной системы это:
.
АФЧХ данной системы это:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 6
Передаточная функция системы -
![]() .
Амплитудно-частотная характеристика
САУ это:
.
Амплитудно-частотная характеристика
САУ это:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 7
Передаточная функция системы -
![]() .
Фазо-частотная характеристика САУ это:
.
Фазо-частотная характеристика САУ это:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 8
АФЧХ САУ представлена в виде
![]() .
Что такое
.
Что такое![]() :
:
1. АЧХ
2. ФЧХ
3. Действительная ЧХ
4. Мнимая ЧХ
№ 9
АФЧХ САУ представлена в виде
![]() .
Что такое
.
Что такое![]() :
:
1. АЧХ
2. ФЧХ
3. Действительная ЧХ
4. Мнимая ЧХ
№ 10
АФЧХ САУ представлена в виде
![]() .
Что представляет собой
.
Что представляет собой![]() :
:
1. АЧХ
2. ФЧХ
3. Действительная ЧХ
4. Мнимая ЧХ
№ 11
АФЧХ САУ представлена в виде
![]() .
Что представляет собой
.
Что представляет собой![]() :
:
1. АЧХ
2. ФЧХ
3. Действительная ЧХ
4. Мнимая ЧХ
№ 12
![]() и
и![]() - амплитудная и фазовая характеристики.
- амплитудная и фазовая характеристики.![]() и
и![]() - вещественная и мнимая характеристики.
Какое из приведенных соотношений
является правильным:
- вещественная и мнимая характеристики.
Какое из приведенных соотношений
является правильным:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 13
![]() и
и![]() - амплитудная и фазовая характеристики.
- амплитудная и фазовая характеристики.![]() и
и![]() - вещественная и мнимая характеристики.
Какое из приведенных соотношений
является правильным:
- вещественная и мнимая характеристики.
Какое из приведенных соотношений
является правильным:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 14
![]() и
и![]() - амплитудная и фазовая характеристики.
- амплитудная и фазовая характеристики.![]() и
и![]() - вещественная и мнимая характеристики.
Какое из приведенных соотношений
является правильным:
- вещественная и мнимая характеристики.
Какое из приведенных соотношений
является правильным:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 15
![]() и
и![]() - амплитудная и фазовая характеристики.
- амплитудная и фазовая характеристики.![]() и
и![]() - вещественная и мнимая характеристики.
Какое из приведенных соотношений
является правильным:
- вещественная и мнимая характеристики.
Какое из приведенных соотношений
является правильным:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 16
Входной сигнал системы
![]() .
Установившийся процесс на выходе имеет
вид
.
Установившийся процесс на выходе имеет
вид![]() .
.![]() - передаточная функция системы.
- передаточная функция системы.![]() ,
,![]() .
Чему равно значение АЧХ системы на
данной частоте:
.
Чему равно значение АЧХ системы на
данной частоте:
1. 102
2. 0,2
3. 5
4. 12
№ 17
Входной сигнал системы
![]() .
Установившийся процесс на выходе имеет
вид
.
Установившийся процесс на выходе имеет
вид![]() .
.![]() - передаточная функция системы.
- передаточная функция системы.![]() ,
,![]() .
Определить значение ФЧХ
.
Определить значение ФЧХ![]() на данной частоте:
на данной частоте:
1. -90°
2. -30°
3. 30°
4. 90°
№ 18
Входной сигнал системы
![]() .
Установившийся процесс на выходе имеет
вид
.
Установившийся процесс на выходе имеет
вид![]() .
.![]() - передаточная функция системы.
- передаточная функция системы.![]() ,
,![]() .
Определить значение ФЧХ
.
Определить значение ФЧХ![]() на данной частоте:
на данной частоте:
1. 67.5°
2. 0.5°
3. 22.5°
4. -22.5°
№ 19
![]() - логарифмическая амплитудно-частотная
характеристика САУ.
- логарифмическая амплитудно-частотная
характеристика САУ.![]() - амплитудно-частотная характеристика
САУ. Значению
- амплитудно-частотная характеристика
САУ. Значению![]() соответствует:
соответствует:
1.
![]() дб
дб
2.
![]() дб
дб
3.
![]() дб
дб
4.
![]() дб
дб
№ 20
Может ли АЧХ системы принимать отрицательные значения:
1. Нет, не может никогда
2. Да, если амплитуда выходного гармонического сигнала меньше амплитуды входного гармонического сигнала
3. Да, если амплитуда выходного гармонического сигнала больше амплитуды входного гармонического сигнала
4. Может, в зависимости от параметров системы
№ 21
Может ли ЛАЧХ системы
![]() принимать отрицательные значения:
принимать отрицательные значения:
1. Нет, не может никогда
2. Да, если амплитуда выходного гармонического сигнала меньше амплитуды входного гармонического сигнала
3. Да, если амплитуда выходного гармонического сигнала больше амплитуды входного гармонического сигнала
4. Да,
![]() всегда отрицательна
всегда отрицательна
№ 22
Два звена образуют последовательное
соединение.
![]() и
и![]() - амплитудная и фазовая частотные
характеристики 1-го звена.
- амплитудная и фазовая частотные
характеристики 1-го звена.![]() и
и![]() - амплитудная и фазовая частотные
характеристики 2-го звена. АЧХ всего
соединения определяется зависимостью:
- амплитудная и фазовая частотные
характеристики 2-го звена. АЧХ всего
соединения определяется зависимостью:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 23
Два звена образуют последовательное
соединение.
![]() и
и![]() - амплитудная и фазовая частотные
характеристики 1-го звена.
- амплитудная и фазовая частотные
характеристики 1-го звена.![]() и
и![]() - амплитудная и фазовая частотные
характеристики 2-го звена. ФЧХ всего
соединения определяется зависимостью:
- амплитудная и фазовая частотные
характеристики 2-го звена. ФЧХ всего
соединения определяется зависимостью:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
№ 24
Асимптотические ЛАФЧХ отличаются от истинных:
1. Упрощенным построением ЛАЧХ
2. Упрощенным построением ЛФЧХ
3. Упрощенным построением ЛАЧХ и ЛФЧХ
4. Отбрасыванием больших частот при их построении
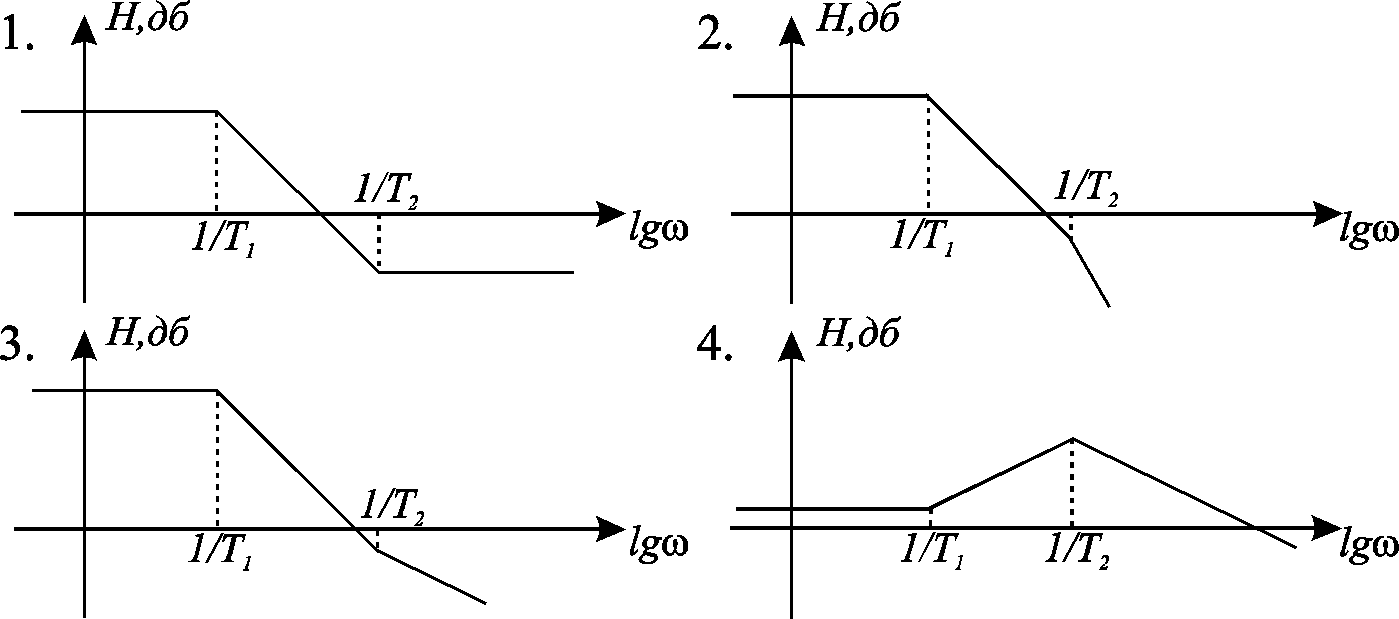
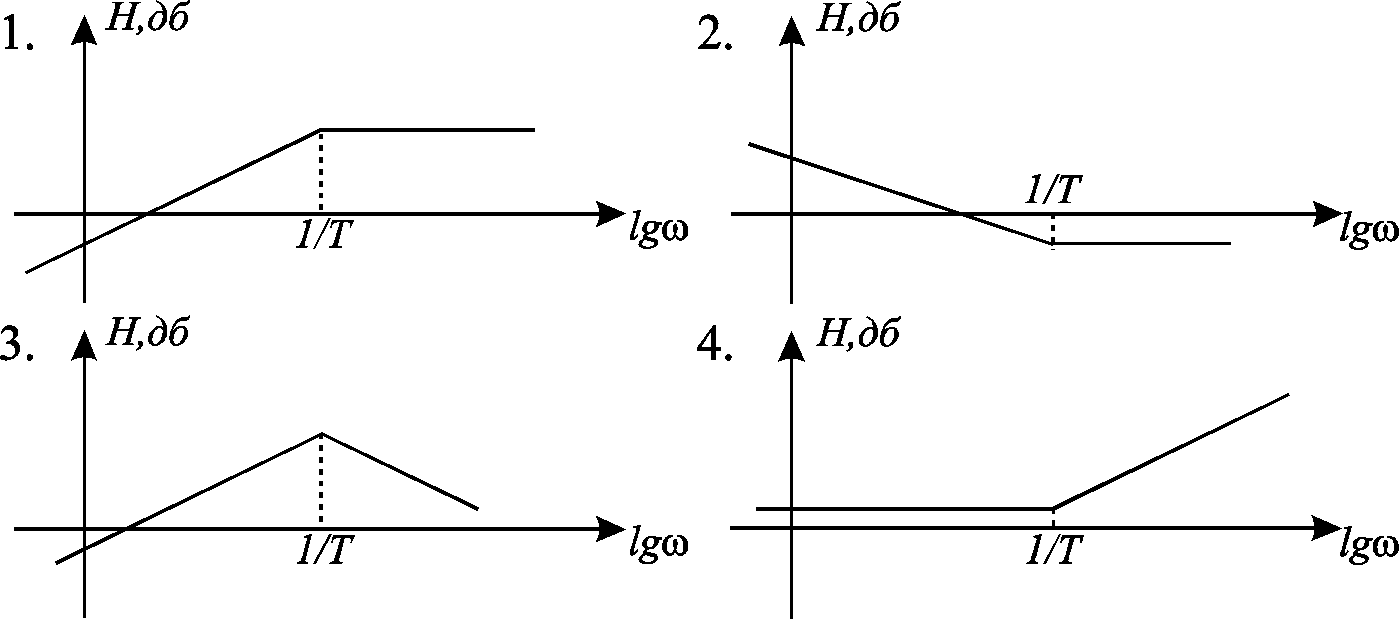
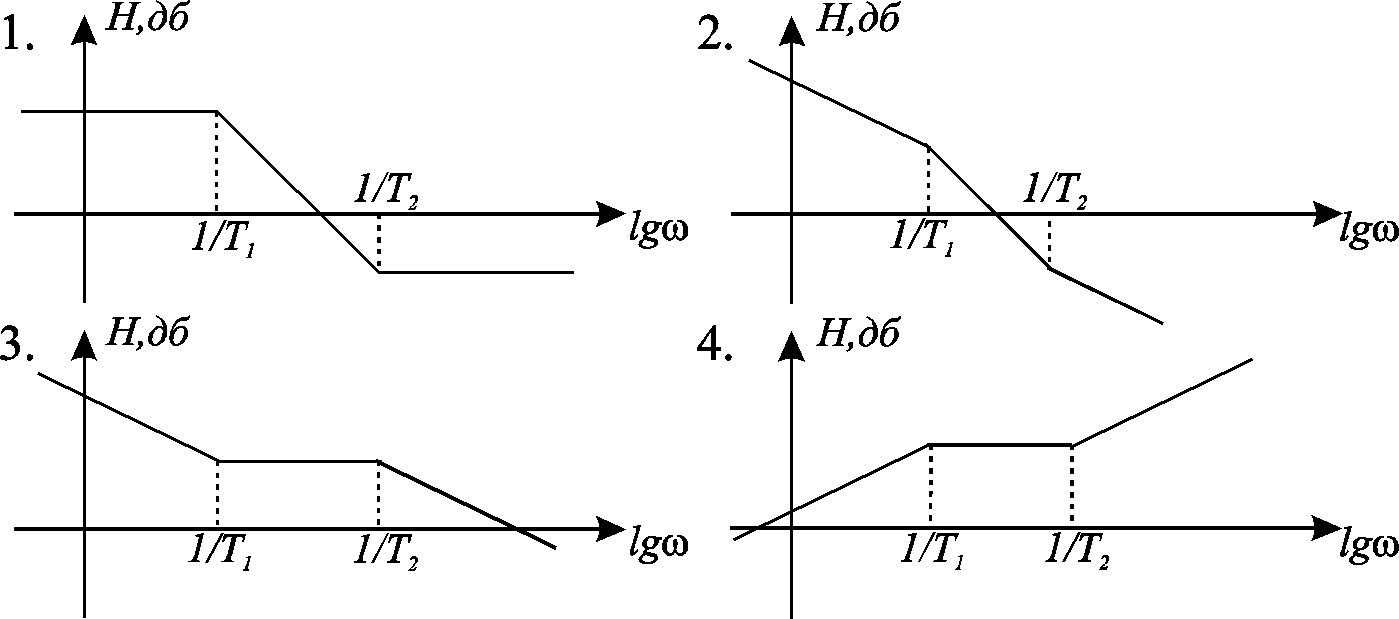
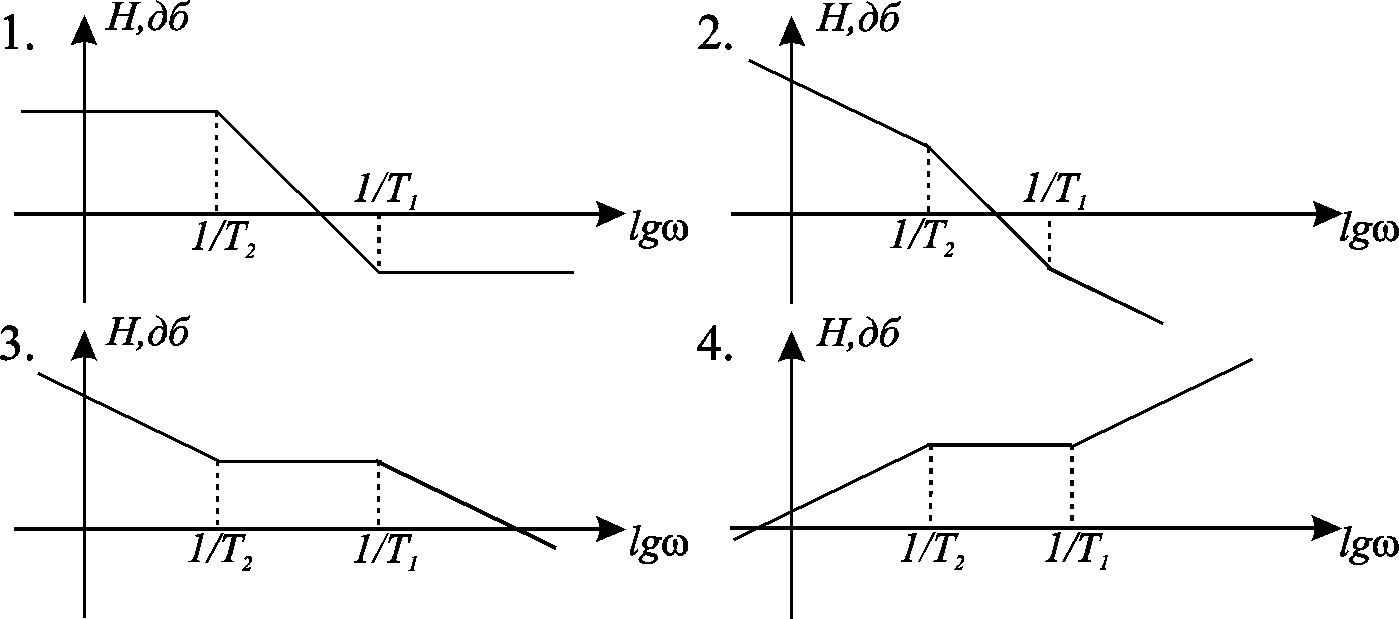
№ 25

ЛАЧХ звена имеет следующий вид.
Эту характеристику имеет звено:
1. Интегрирующее
2. Форсирующее
3. Безинерционное
4. Апериодическое
№ 26

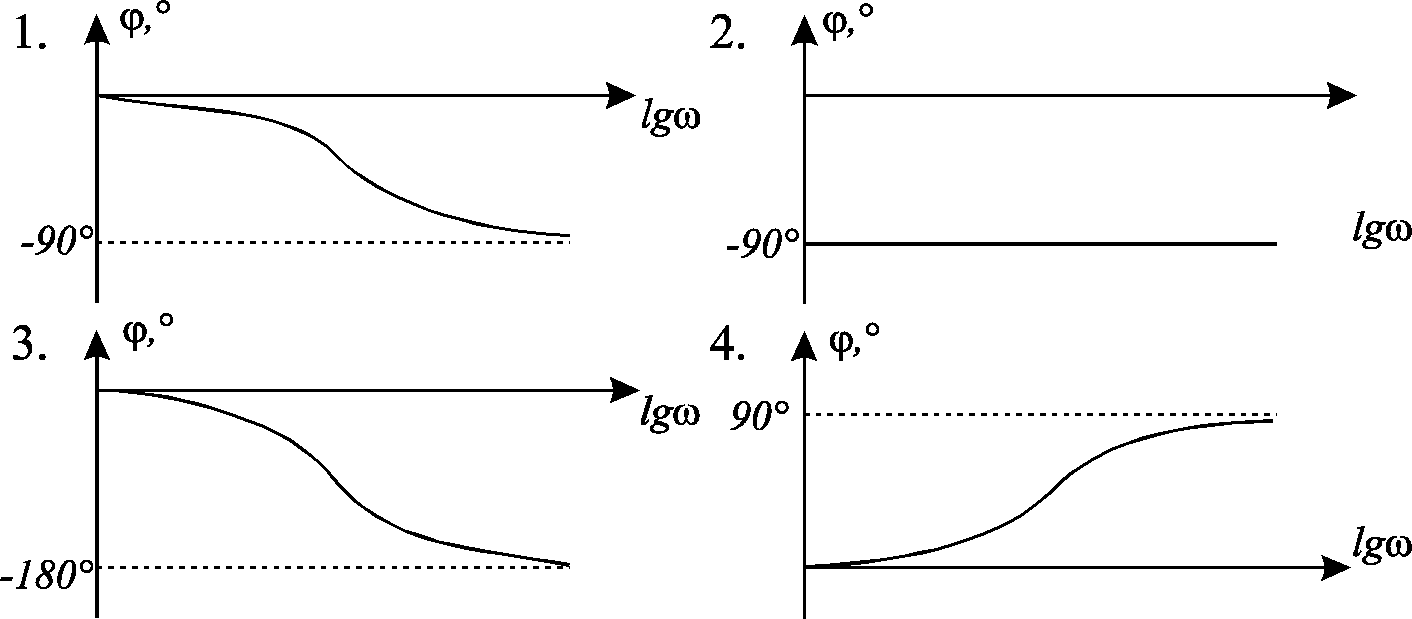
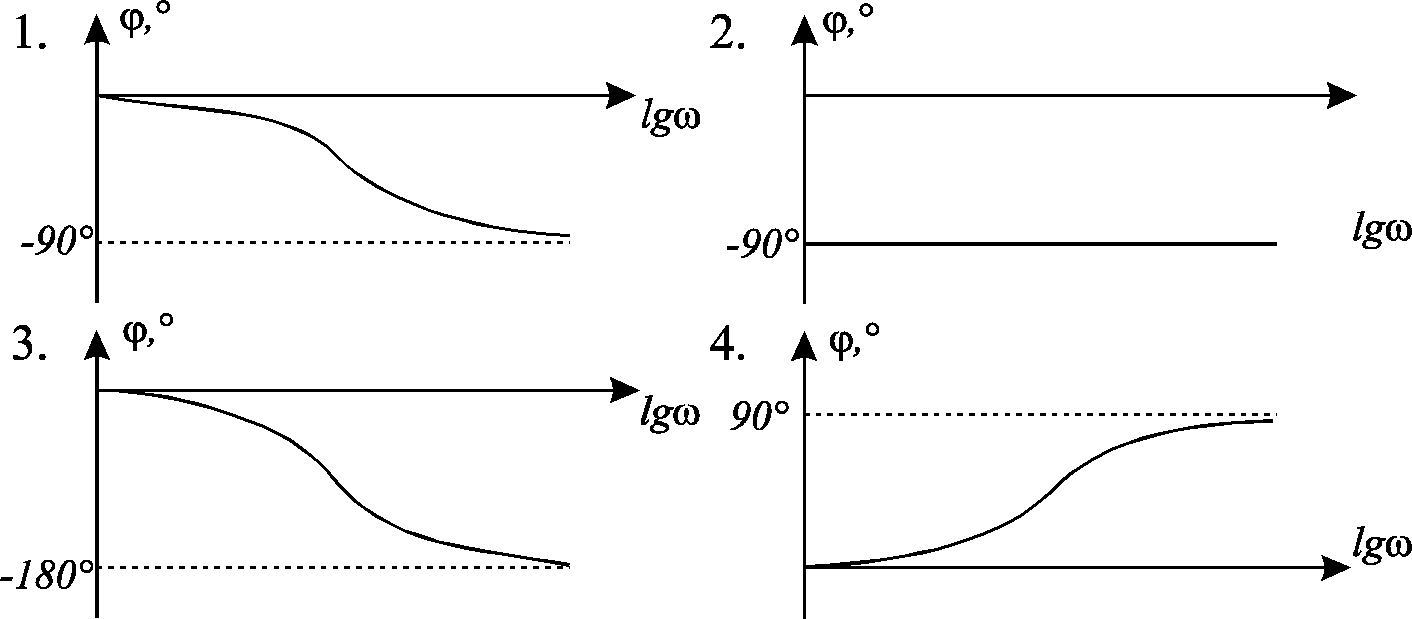
ЛФЧХ звена имеет следующий вид.
Эту характеристику имеет звено:
1. Интегрирующее
2. Форсирующее
3. Безинерционное
4. Апериодическое
№ 27
Л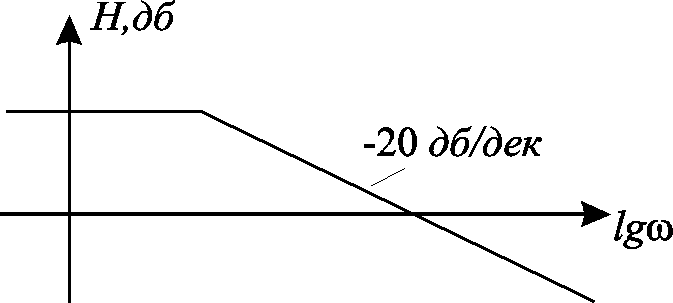 АЧХ
звена имеет следующий вид.
АЧХ
звена имеет следующий вид.
Эту характеристику имеет звено:
1. Интегрирующее
2. Форсирующее
3. Безинерционное
4. Апериодическое
№ 28
Л АЧХ
звена имеет следующий вид.
АЧХ
звена имеет следующий вид.
Эту характеристику имеет звено:
1. Интегрирующее
2. Форсирующее
3. Безинерционное
4. Апериодическое
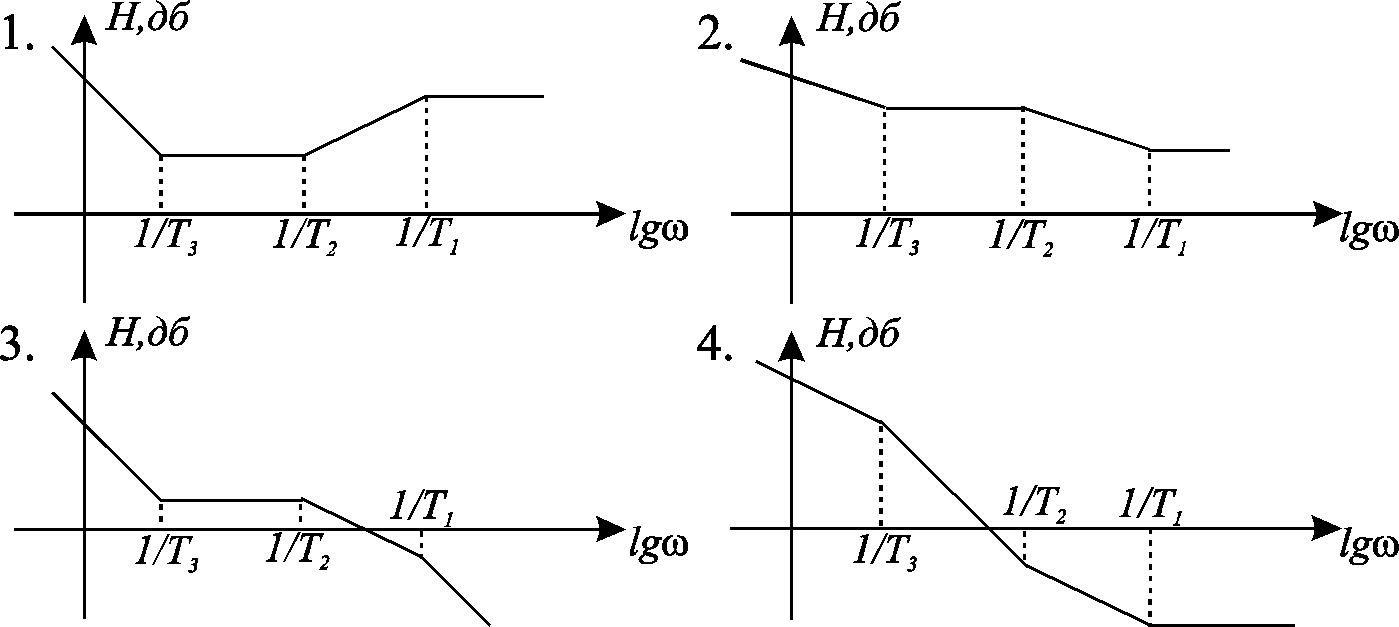
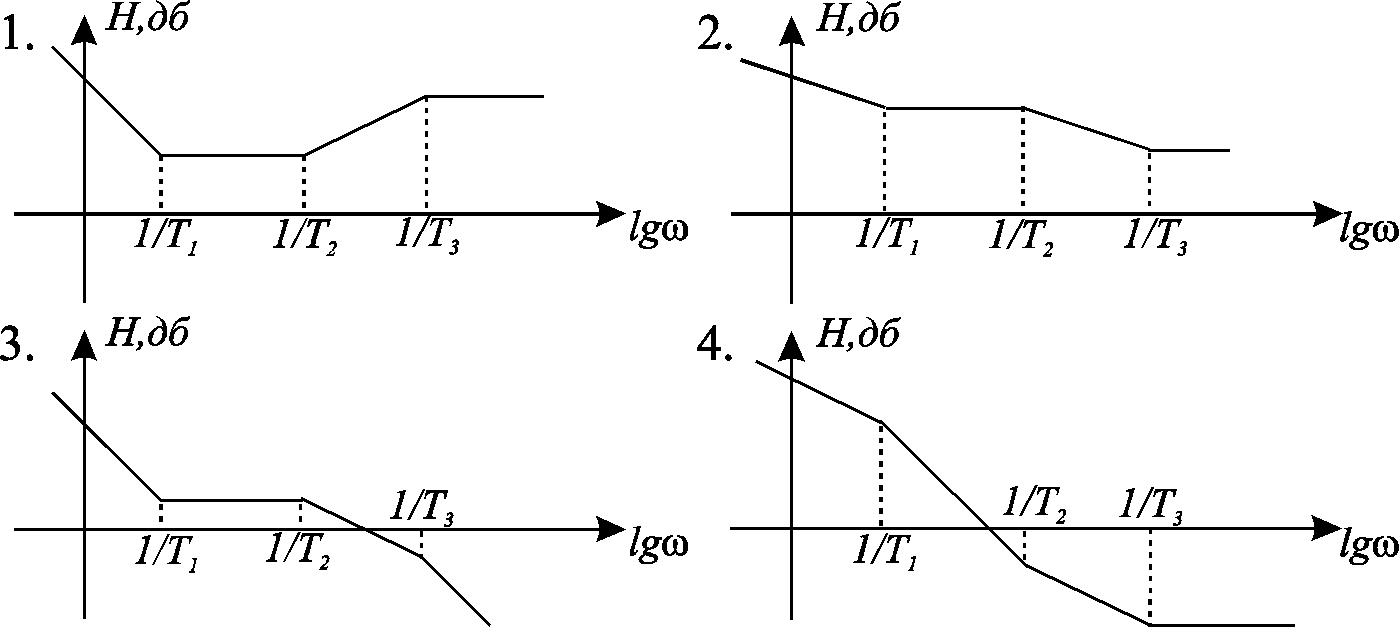
№ 29
Л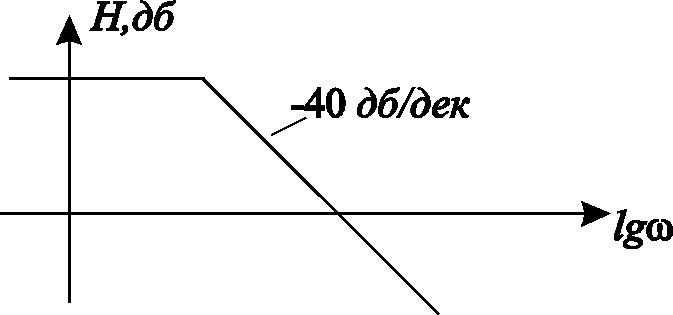 АЧХ
звена имеет следующий вид.
АЧХ
звена имеет следующий вид.
Эту характеристику имеет звено:
1. Колебательное
2. Два последовательно соединенных интегрирующих
3. Апериодическое
4. Форсирующее 2-го порядка
№ 30
Л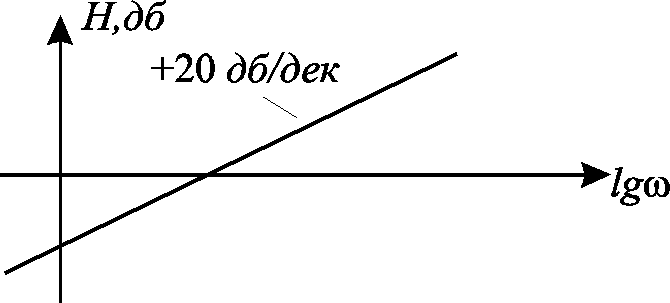 АЧХ
звена имеет следующий вид.
АЧХ
звена имеет следующий вид.
Эту характеристику имеет звено:
1. Дифференцирующее
2. Форсирующее
3. Интегрирующее
4. Безинерционное
№ 31
ФЧХ апериодического звена при изменении
![]() от 0 до ∞ изменяется в пределах:
от 0 до ∞ изменяется в пределах:
1. От 0 до -180°
2. От 0 до +90°
3. Всегда равна -90°
4. От 0 до -90°
№ 32
ФЧХ форсирующего звена при изменении
![]() от 0 до ∞ изменяется в пределах:
от 0 до ∞ изменяется в пределах:
1. От 0 до -180°
2. От 0 до +90°
3. Всегда равна -90°
4. От 0 до -90°
№ 33
ФЧХ колебательного звена при изменении
![]() от 0 до ∞ изменяется в пределах:
от 0 до ∞ изменяется в пределах:
1. От 0 до -180°
2. От 0 до +90°
3. Всегда равна -90°
4. От 0 до -90°
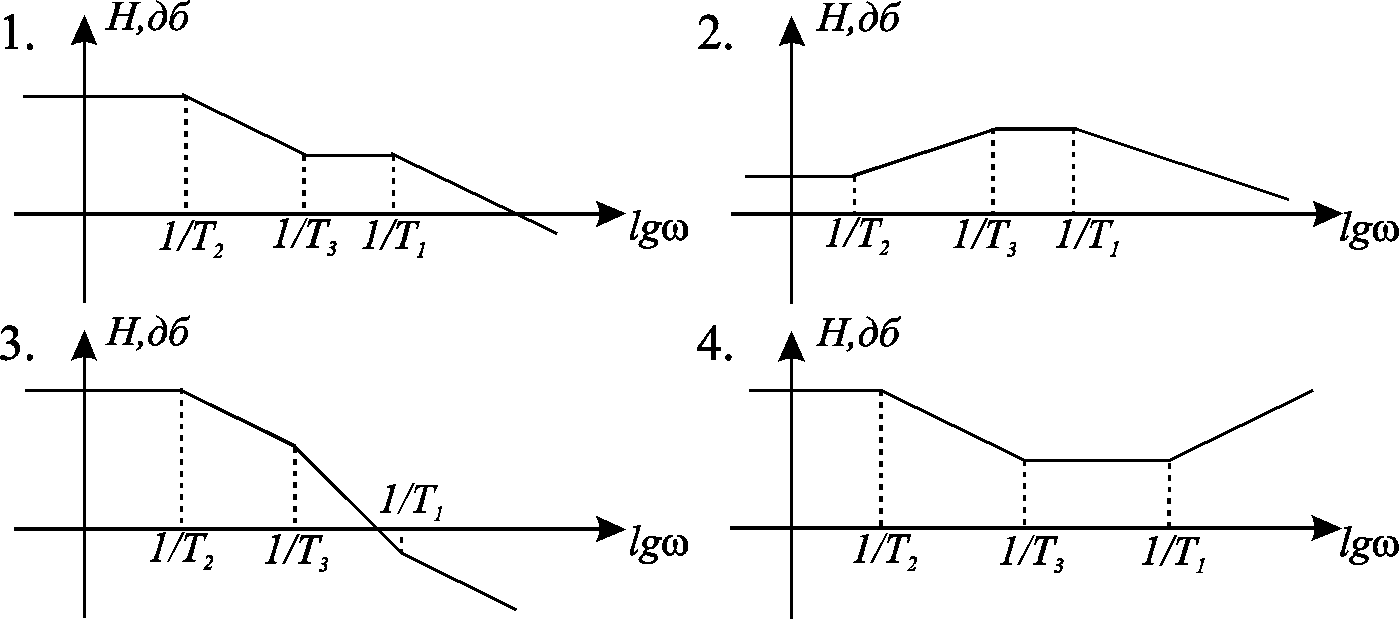
№ 34
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 1
1
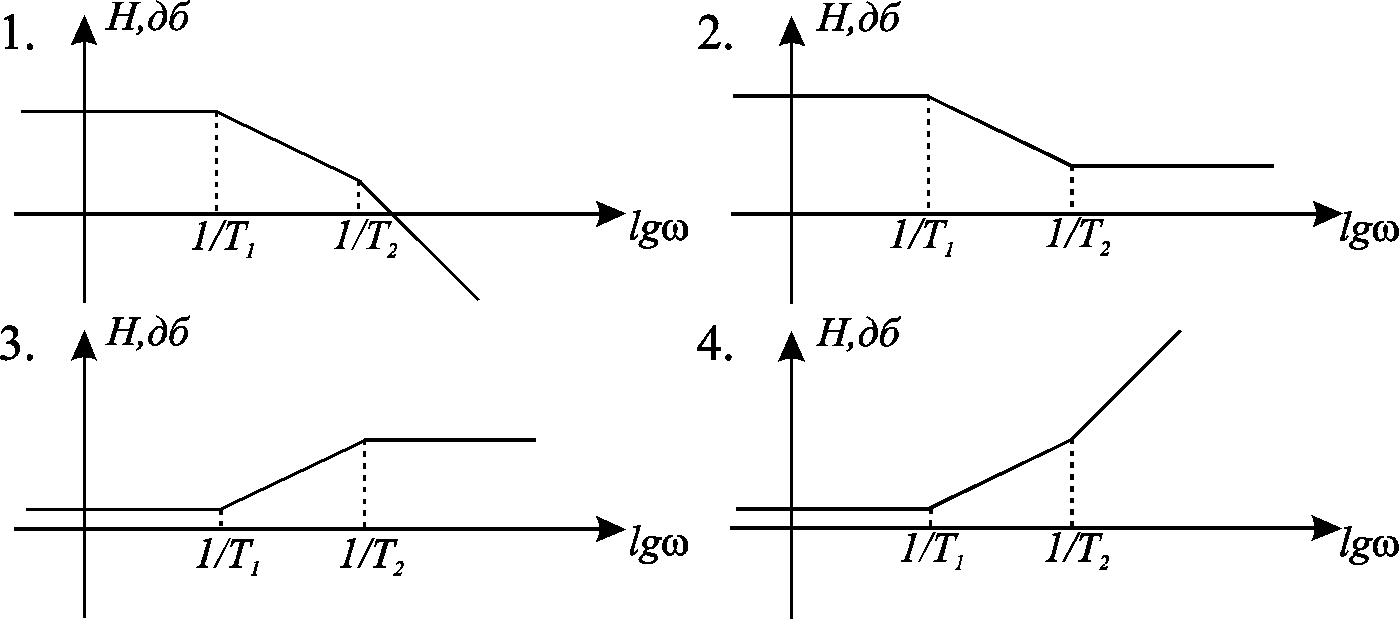
№ 35
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 3
3
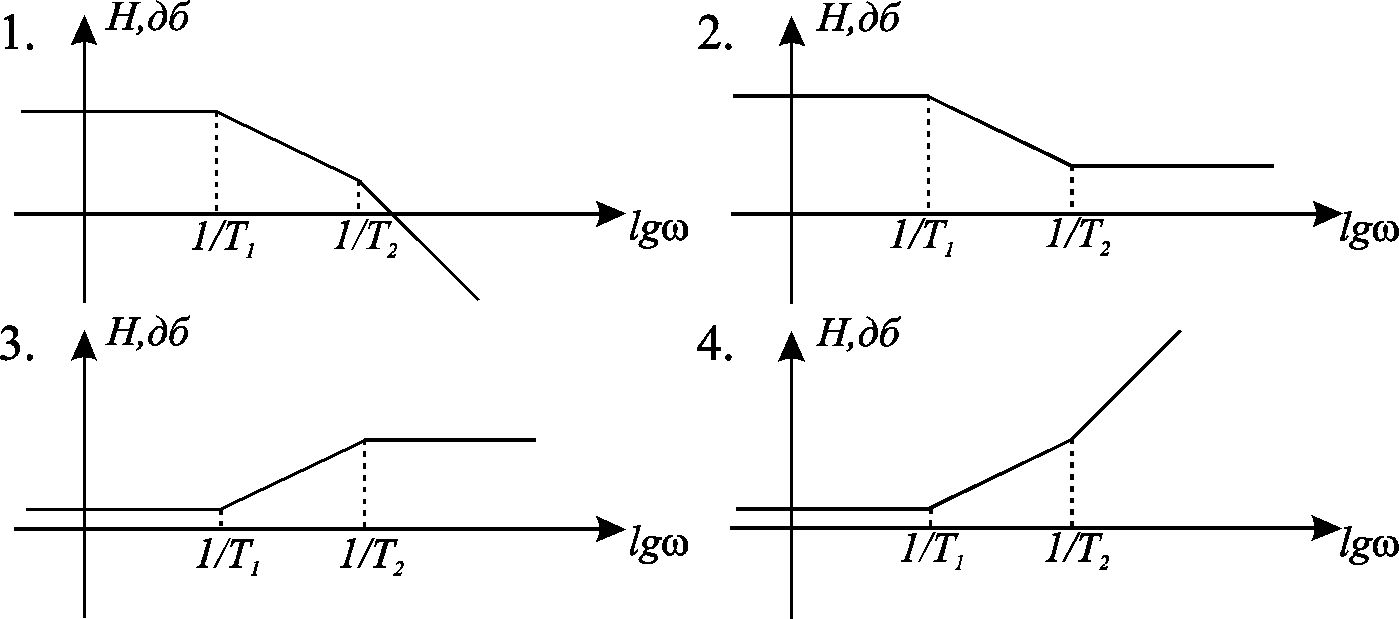
№ 36
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 2
2
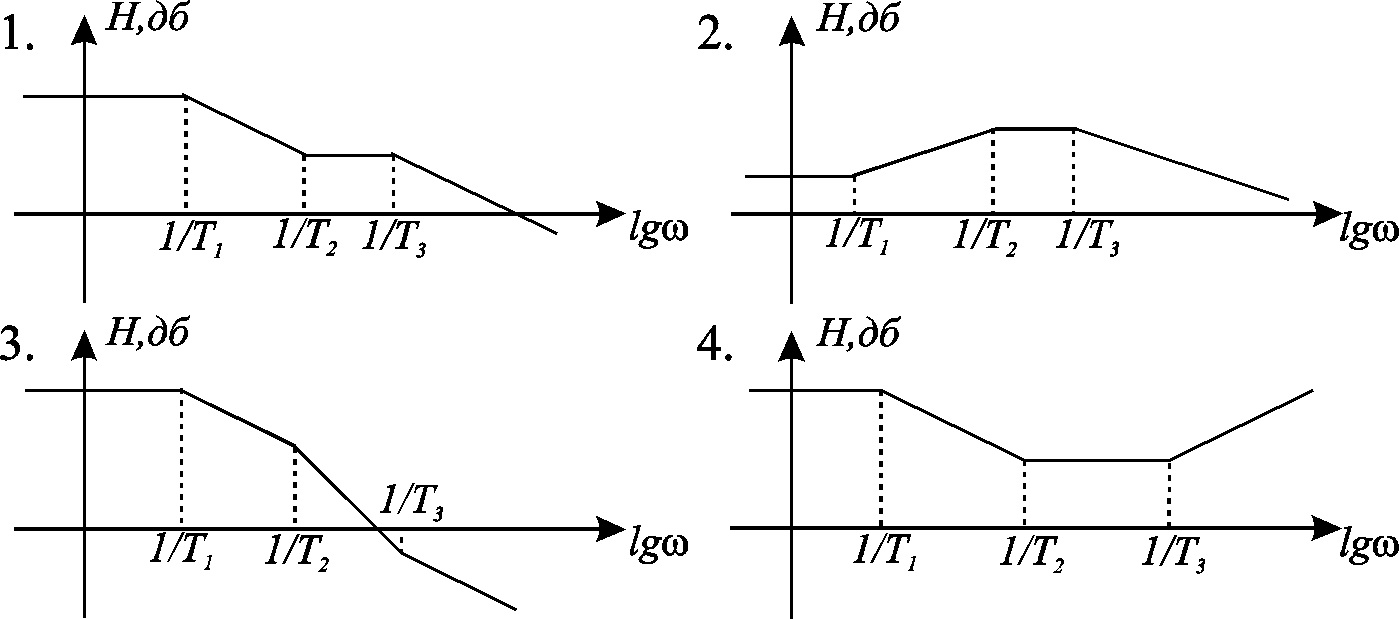
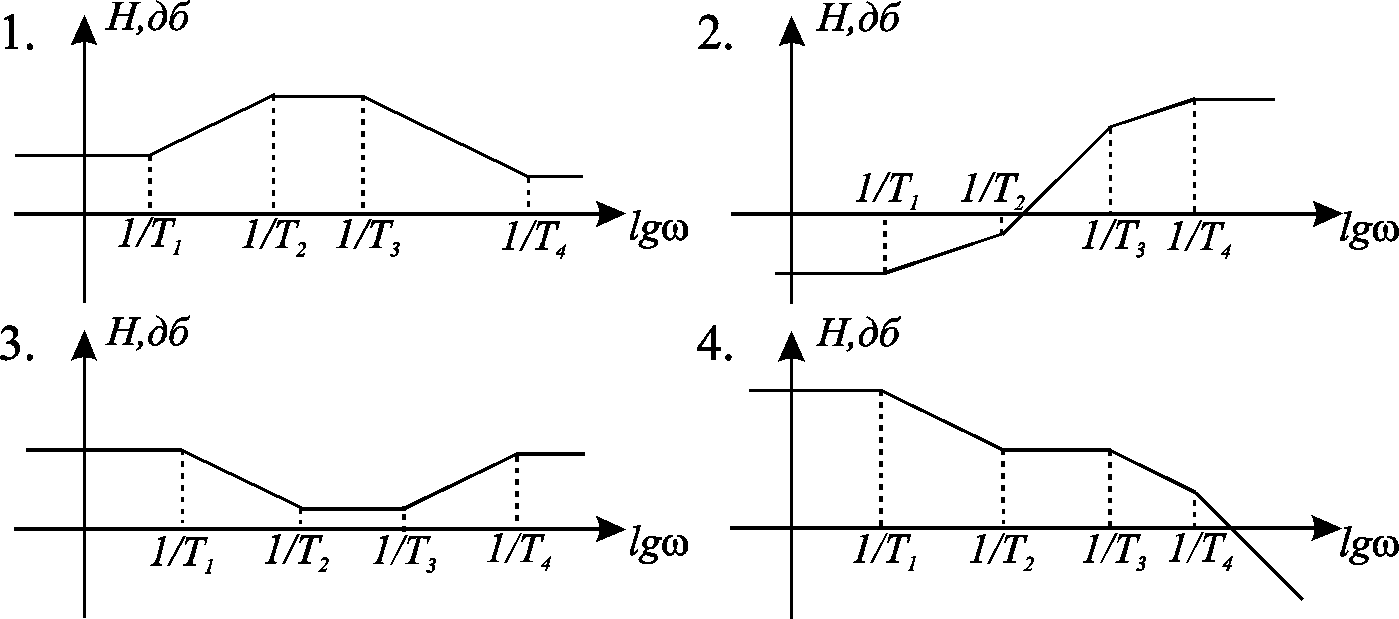
№ 37
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 4
4
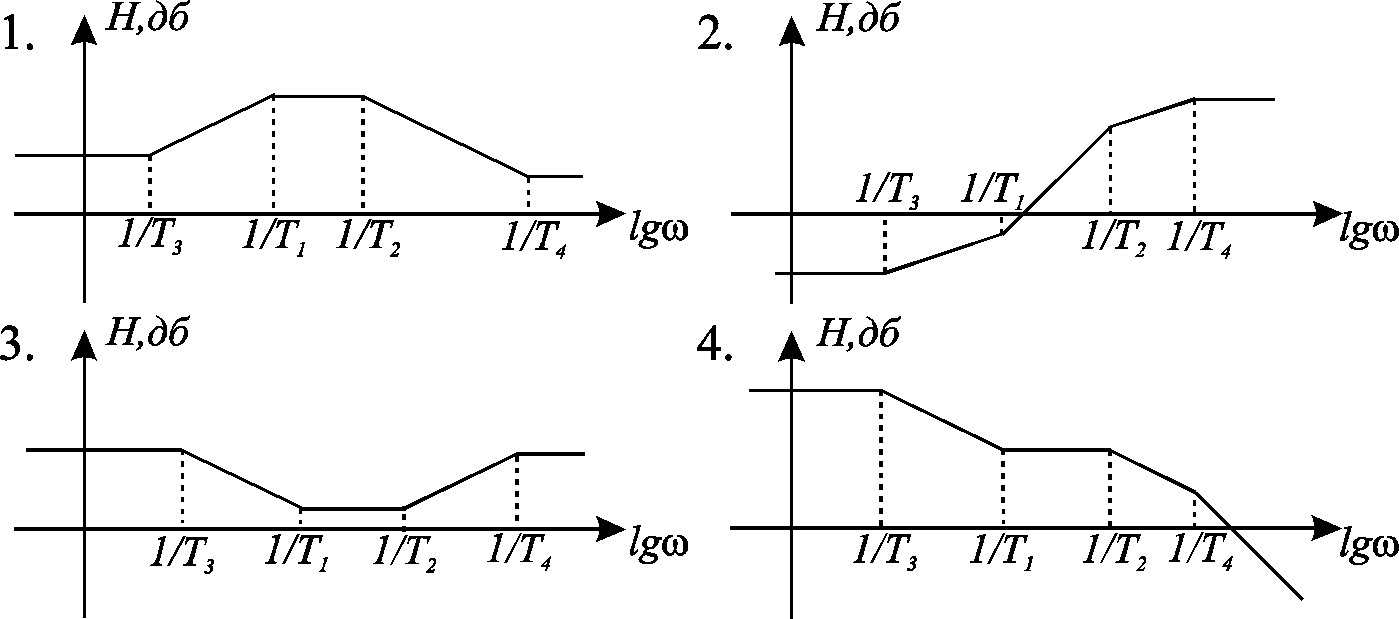
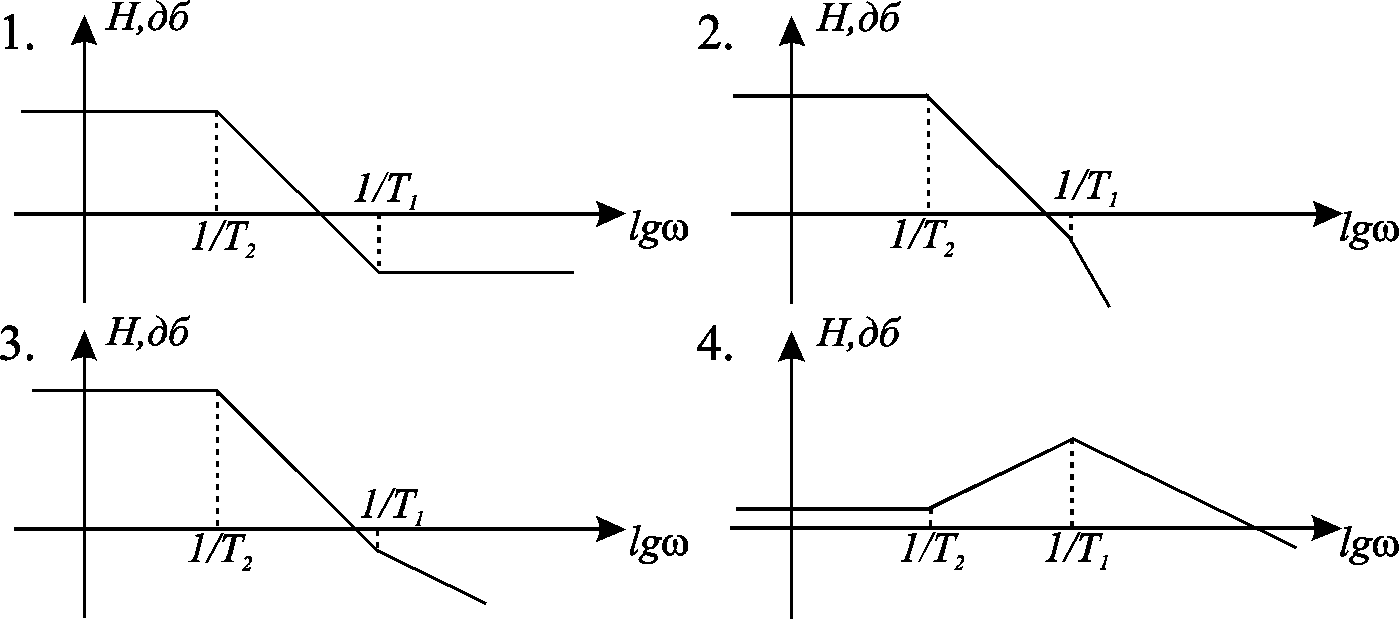
№ 38
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 2
2
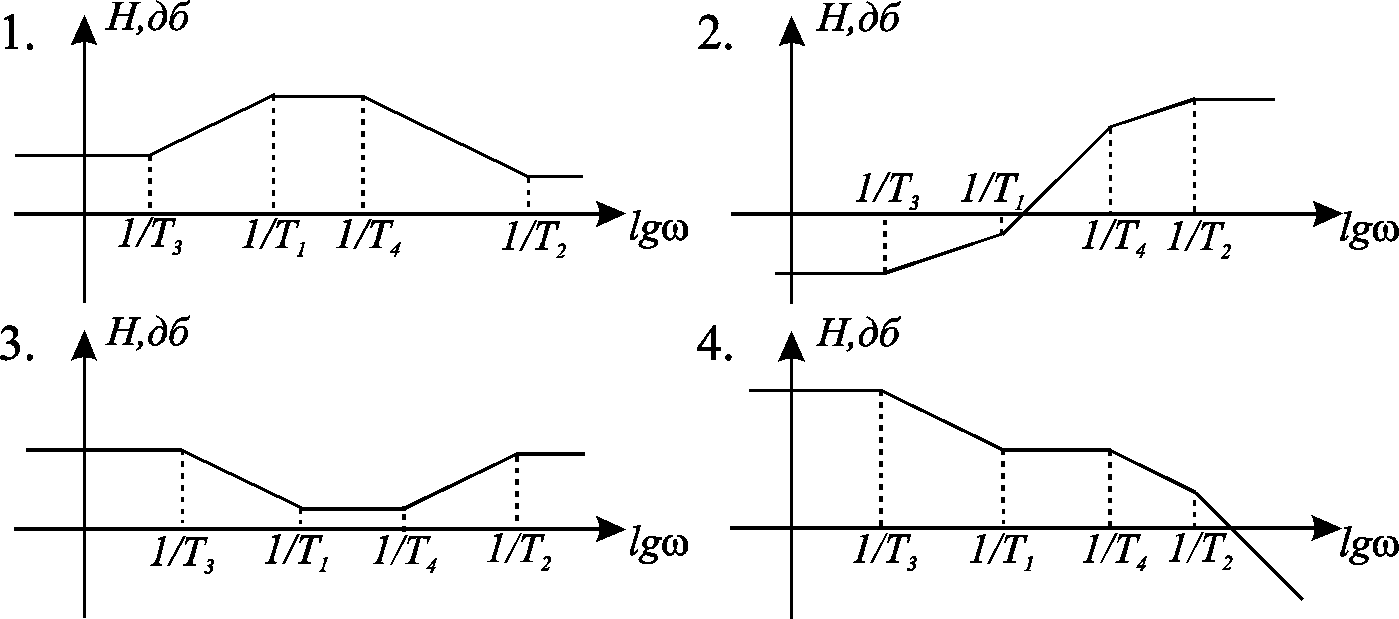
№ 39
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 2
2
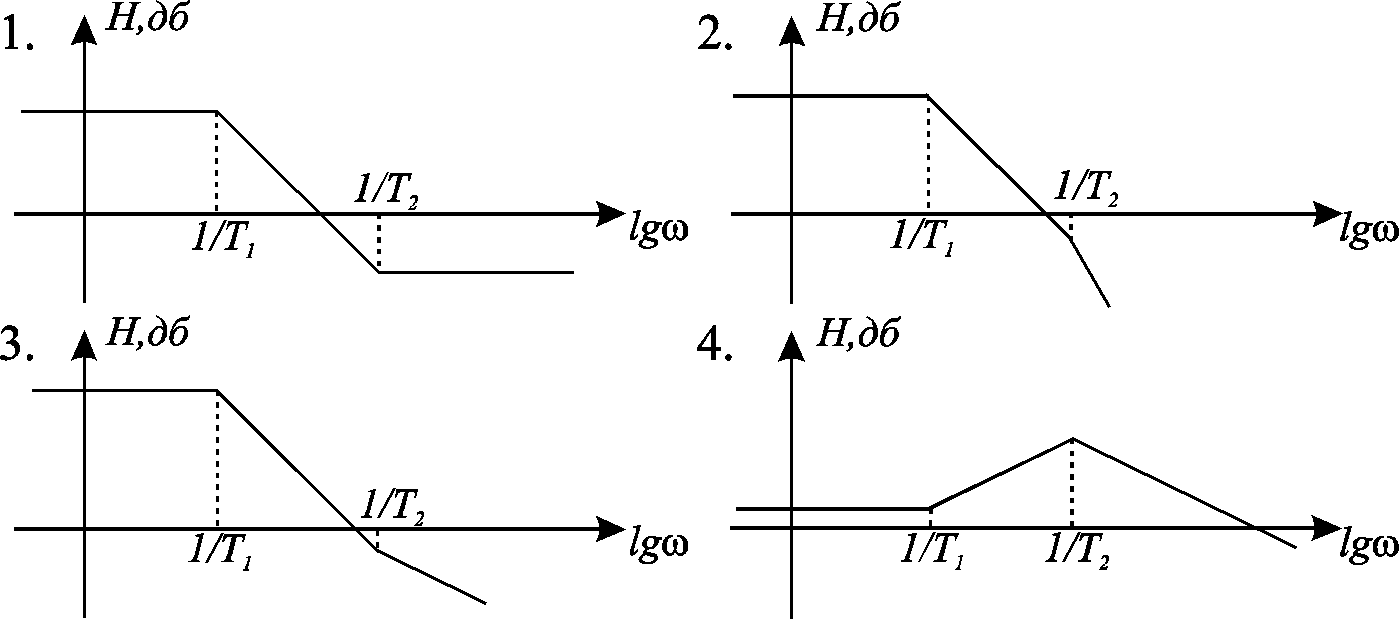
№ 40
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 4
4
№ 41
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 3
3
№ 42
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 2
2
№ 43
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 2
2
№ 44
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 3
3
№ 45
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 1
1
№ 46
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 ?
?
№ 47
![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 1
1
№ 48
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 1
1
№ 49
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 3
3
№ 50
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 4
4
№ 51
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 2
2
№ 52
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 3
3
№ 53
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 2
2
№ 54
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 4
4
№ 55
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 2
2
№ 56
![]() ,
,![]() .
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
.
Какой вид имеет асимптотическая ЛАЧХ
данного звена:
 1
1
№ 57
ФЧХ апериодического звена имеет вид:
 1
1
№ 58
ФЧХ форсирующего звена имеет вид:
 4
4
№ 59
ФЧХ колебательного звена имеет вид:
 3
3
№ 60
ФЧХ интегрирующего звена имеет вид:
 2
2
№ 61
В асимптотической ЛАЧХ апериодического звена высокочастотная асимптота представляет собой:
1. Луч с наклоном -20 дб/дек
2. Горизонтальную прямую с ординатой
![]()
3. Луч с наклоном +20 дб/дек
4. Луч с наклоном -40 дб/дек
№ 62
В асимптотической ЛАЧХ форсирующего звена высокочастотная асимптота представляет собой:
1. Луч с наклоном -20 дб/дек
2. Горизонтальную прямую с ординатой
![]()
3. Луч с наклоном +20 дб/дек
4. Луч с наклоном -40 дб/дек
№ 63
В асимптотической ЛАЧХ колебательного звена высокочастотная асимптота представляет собой:
1. Луч с наклоном -20 дб/дек
2. Горизонтальную прямую с ординатой
![]()
3. Луч с наклоном +20 дб/дек
4. Луч с наклоном -40 дб/дек
№ 64
АЧХ звена постоянного запаздывания с
передаточной функцией
![]() ,
,![]() определяется
выражением:
определяется
выражением:
1.
![]()
2.
![]()
3.
![]()
4. 1
№ 65
ФЧХ звена постоянного запаздывания с
передаточной функцией
![]() ,
,![]() определяется
выражением:
определяется
выражением:
1.
![]()
2.
![]()
3.
![]()
4. 1
№ 66
Имеются ЛАФЧХ апериодического звена с
передаточной функцией
![]() .
Какие изменения в них произойдут при
увеличении
.
Какие изменения в них произойдут при
увеличении![]() в 2 раза:
в 2 раза:
1. ЛФЧХ увеличится в 2 раза, ЛАЧХ не изменится
2. ЛАЧХ уменьшится на
![]() дб,
ЛФЧХ не изменится
дб,
ЛФЧХ не изменится
3. ЛАЧХ поднимется на
![]() дб,
ЛФЧХ не изменится
дб,
ЛФЧХ не изменится
4. ЛАЧХ увеличится в 2 раза, ЛФЧХ не изменится
№ 67
Имеются ЛАФЧХ апериодического звена с
передаточной функцией
![]() .
Какие изменения в них произойдут при
уменьшении
.
Какие изменения в них произойдут при
уменьшении![]() в 2 раза:
в 2 раза:
1. ЛФЧХ увеличится в 2 раза, ЛАЧХ не изменится
2. ЛАЧХ уменьшится на
![]() дб,
ЛФЧХ не изменится
дб,
ЛФЧХ не изменится
3. ЛАЧХ поднимется на
![]() дб,
ЛФЧХ не изменится
дб,
ЛФЧХ не изменится
4. ЛАЧХ увеличится в 2 раза, ЛФЧХ не изменится
№ 68
В асимптотической ЛАЧХ апериодического
звена
![]() низкочастотная асимптота представляет
собой:
низкочастотная асимптота представляет
собой:
1. Луч с наклоном -20 дб/дек
2. Горизонтальную
прямую с ординатой
![]()
3. Луч с наклоном +20 дб/дек
4. Луч с наклоном -40 дб/дек
№ 69
В асимптотической ЛАЧХ колебательного
звена
![]() низкочастотная асимптота представляет
собой:
низкочастотная асимптота представляет
собой:
1. Луч с наклоном -20 дб/дек
2. Горизонтальную
прямую с ординатой
![]()
3. Луч с наклоном +20 дб/дек
4. Луч с наклоном -40 дб/дек
№ 70
ЛАЧХ интегрирующего звена представляет собой:
1. Прямую с наклоном +20 дб/дек, проходящую
на плоскости (![]() ,
,![]() )
через точку (
)
через точку (![]() ,1)
,1)
2. Прямую с наклоном +20 дб/дек, проходящую
на плоскости (![]() ,
,![]() )
через точку (
)
через точку (![]() ,0)
,0)
3. Прямую с наклоном
-20 дб/дек, проходящую на плоскости (![]() ,
,![]() )
через точку (
)
через точку (![]() ,0)
,0)
4. Прямую с наклоном -20 дб/дек, проходящую
на плоскости (![]() ,
,![]() )
через точку (
)
через точку (![]() ,1)
,1)
Вспомогательный лист к частотным характеристикам
1-24 вопросы общего характера – могут даваться по 2 в задании.
Вопросы 25-33 (9 шт.) – характеристики отдельных звеньев
Вопросы 34-56 – ЛАФЧХ соединений
Устойчивость.
Общие вопросы и D–разбиение.
№1
В устойчивой системе:
1. Реакция на любое воздействие ограничена.
2. Реакция на любое ограниченное воздействие ограничена.
3. Реакция на неограниченное воздействие ограничена.
4.Найдется хотя бы одно ограниченное воздействие, реакция на которое неограниченна.
№2
Какое из приведенных ниже условий
является необходимым и достаточным
условием устойчивости линейной системы
(![]() - передаточная функция,
- передаточная функция,![]() - переходная характеристика,
- переходная характеристика,![]() - импульсная переходная функция):
- импульсная переходная функция):
1.
![]() для всех
для всех![]() 3.
3.
![]()
2.
![]() 4.
4.![]() для всех
для всех![]() :
:![]() .
.
№3
Какое из приведенных ниже условий
является необходимым и достаточным
условием устойчивости линейной системы
(![]() - передаточная функция,
- передаточная функция,![]() - переходная характеристика,
- переходная характеристика,![]() - импульсная переходная функция):
- импульсная переходная функция):
1.
![]() для всех
для всех![]() :
:![]() 3.
3.![]()
2.
![]() 4.
4.![]() для всех
для всех![]()
№4
Передаточная функция системы имеет
вид:
 .
Характеристическое уравнение данной
системы имеет вид:
.
Характеристическое уравнение данной
системы имеет вид:
1.
![]()
2.
![]()
3.
![]()
4.
![]() =0.
=0.
№5
Для того, чтобы система была устойчивой,
корни характеристического уравнения
![]() должны удовлетворять условию:
должны удовлетворять условию:
1.
![]()
![]() 3.
3.
![]()
![]()
2.
![]()
![]() 4.
4.![]()
![]() .
.
№6
Заданы 4 набора значений корней характеристического уравнения. Указать, какой набор корней соответствует устойчивой системе:
1.
![]()
![]()
![]()
2.
![]()
![]()
![]()
3.
![]()
![]()
![]()
4.
![]()
![]()
![]() .
.
№7
Заданы 4 набора значений корней характеристического уравнения. Указать, какой набор корней соответствует устойчивой системе:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№8
Заданы 4 набора значений корней характеристического уравнения. Указать, какой набор корней соответствует устойчивой системе:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№9
Из приведенных характеристических уравнений, не решая их, выделить уравнение, соответствующее заведомо неустойчивой системе:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№10
Из приведенных характеристических уравнений, не решая их, выделить уравнение, соответствующее заведомо неустойчивой системе:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№11
Из приведенных характеристических уравнений, не решая их, выделить уравнение, соответствующее заведомо неустойчивой системе:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№12
Выделить верное утверждение:
1. Если коэффициенты характеристического уравнения имеют одинаковые знаки, то система устойчива.
2. Если система устойчива, то коэффициенты характеристического уравнения имеют одинаковые знаки.
3. Если характеристическое уравнение не имеет кратных корней, то система устойчива.
4. Если система неустойчива, то коэффициенты характеристического уравнения имеют различные знаки.
№13
Выделить неверное утверждение:
1.Если система устойчива, то коэффициенты характеристического уравнения имеют одинаковые знаки.
2. Если коэффициенты характеристического уравнения имеют различные знаки, то система неустойчива.
3. Если коэффициенты характеристического уравнения имеют одинаковые знаки, то система устойчива.
4. Для системы второго порядка положительность коэффициентов характеристического уравнения является необходимым и достаточным условием устойчивости.
№14
Выделить неверное утверждение:
1. Для систем 2-го порядка положительность коэффициентов характеристического уравнения является достаточным условием устойчивости.
2. Для систем 2-го порядка положительность коэффициентов характеристического уравнения является необходимым условием устойчивости.
3. Для систем 3-го и более высоких порядков положительность коэффициентов характеристического уравнения является достаточным условием устойчивости.
4. Для систем 3-го и более высоких порядков положительность коэффициентов характеристического уравнения является необходимым условием устойчивости.
№15
Структурная схема системы имеет вид:
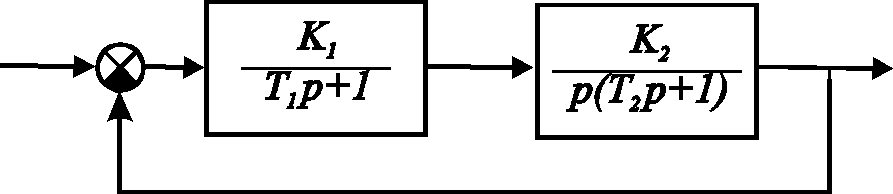 .
.
Характеристическое уравнение этой системы имеет вид:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№16
При проведении D-разбиения решается задача:
1. Анализа устойчивости при заданных параметрах системы.
2. Выделение областей устойчивости в пространстве параметров системы.
3. Выделение областей равных значений корней характеристического уравнения в пространстве параметров системы.
4. Выделение областей действительных значений корней характеристического уравнения в пространстве параметров системы.
№17
Если при проведении D-разбиения
в пространствеDточка
находится на поверхности, разделяющей
области![]() и
и![]() ,
то при этом один из корней характеристического
уравнения:
,
то при этом один из корней характеристического
уравнения:
1. Находится на единичной окружности.
2. Находится на действительной оси
3. Находится на мнимой оси.
4. Находится в бесконечно удаленной точке.
№18
Передаточная функция разомкнутой САУ
имеет вид:
![]() .
Характеристическое уравнение замкнутой
системы с единичной обратной связью
имеет вид:
.
Характеристическое уравнение замкнутой
системы с единичной обратной связью
имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№19
Передаточная функция замкнутой САУ по
ошибке имеет вид:
![]() .
Характеристическое уравнение замкнутой
системы имеет вид:
.
Характеристическое уравнение замкнутой
системы имеет вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]()
№20
Дифференциальное уравнение системы
имеет вид:
![]() .
Характеристическое уравнение для
анализа устойчивости данной системы
имеет вид:
.
Характеристическое уравнение для
анализа устойчивости данной системы
имеет вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№21
Дифференциальное уравнение системы
имеет вид:
![]() .
Характеристическое уравнение для
анализа устойчивости данной системы
имеет вид:
.
Характеристическое уравнение для
анализа устойчивости данной системы
имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
№22
Дифференциальное уравнение системы
имеет вид:
![]() .
Характеристическое уравнение для
анализа устойчивости данной системы
имеет вид:
.
Характеристическое уравнение для
анализа устойчивости данной системы
имеет вид:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№23
Передаточная функция разомкнутой САУ
имеет вид:
![]() .
Характеристическое уравнение замкнутой
системы с единичной обратной связью
имеет вид:
.
Характеристическое уравнение замкнутой
системы с единичной обратной связью
имеет вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]()
№24
В устойчивой линейной системе:
1. Любому входному сигналу всегда соответствует ограниченная реакция системы.
2. Можно подобрать ограниченный входной сигнал, реакция на который будет неограниченной.
3. Собственные движения системы всегда ограничены.
4. Можно подобрать неограниченный входной сигнал, реакция на который будет ограниченной.
№25
Передаточная функция системы имеет
вид:
 .
Система заведомо неустойчива, если:
.
Система заведомо неустойчива, если:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.
![]() .
.
Алгебраические критерии устойчивости.
№26
Критерий Рауса является:
1. Необходимым и достаточным условием устойчивости.
2. Только необходимым условием устойчивости.
3. Только достаточным условием устойчивости.
№27
Характеристическое уравнение системы
имеет вид:
![]() .
Третья сверху строка таблицы Рауса для
этого случая имеет вид:
.
Третья сверху строка таблицы Рауса для
этого случая имеет вид:
1.
-
2
16
14
4
0
2.
-
2
16
-14
0
0
3.
-
2
-16
14
4
0
4.
-
2
-16
-14
4
0
№28
Характеристическое уравнение системы
имеет вид:
![]() .
Третий слева направо столбец определителя
Гурвица для этого случая имеет вид:
.
Третий слева направо столбец определителя
Гурвица для этого случая имеет вид:
1. 4 2. 13. 1 4. 1
1 1616 4
16 1212 16
12 88 12
8 12 8
2 20 2
№29
Характеристическое уравнение системы
имеет вид:
![]() .
Будет ли устойчивой данная система:
.
Будет ли устойчивой данная система:
Да
Нет.
№30
Характеристическое уравнение системы
имеет вид:
![]() .
Определитель Гурвица для этого уравнения
имеет вид:
.
Определитель Гурвица для этого уравнения
имеет вид:
1.
 2.
2.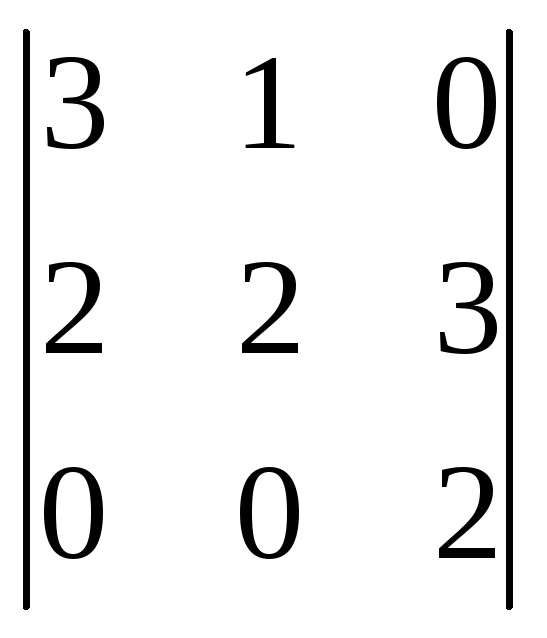 3.
3. 4.
4. .
.
№31
Характеристическое уравнение системы
имеет вид:
![]() .
При каких значениях параметра
.
При каких значениях параметра![]() система будет устойчивой:
система будет устойчивой:
1.
![]() 2.
2.![]() 3.
3.
![]() 4.
4.![]() .
.
№32
Характеристическое уравнение системы
имеет вид:
![]() .
При каких значениях параметра
.
При каких значениях параметра![]() система будет устойчивой:
система будет устойчивой:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№33
Передаточная функция разомкнутой
системы равна
![]() .
При каких значениях
.
При каких значениях![]() будет устойчива система, полученная
замыканием данной передаточной функции
единичной обратной связью:
будет устойчива система, полученная
замыканием данной передаточной функции
единичной обратной связью:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№34
Характеристическое уравнение системы
имеет вид:
![]() .
Четвертая сверху строка таблицы Рауса
для этого случая имеет вид:
.
Четвертая сверху строка таблицы Рауса
для этого случая имеет вид:
1.
-
1
4
3
0
2.
-
0
6
4
0
3.
-
1,5
1,5
0
0
4.
-
1,5
3
1
0
№35
Характеристическое уравнение системы
имеет вид:
![]() .
Будет ли устойчивой данная система:
.
Будет ли устойчивой данная система:
Да
Нет.
№36
Характеристическое уравнение системы
имеет вид:
![]() .
Определитель Гурвица для этого уравнения
имеет вид:
.
Определитель Гурвица для этого уравнения
имеет вид:
1.
 2.
2. 3.
3. 4.
4.

№37
Характеристическое уравнение системы
имеет вид:
![]() .
Третья сверху строка таблицы Рауса для
этого случая имеет вид:
.
Третья сверху строка таблицы Рауса для
этого случая имеет вид:
1.
-
0
4
3
12
2.
-
0
6
4
0
3.
-
2/3
4
0
0
4.
-
1
6
3
0
№38
Характеристическое уравнение системы
имеет вид:
![]() .
Первый диагональный минор определителя
Гурвица для этого случая имеет вид:
.
Первый диагональный минор определителя
Гурвица для этого случая имеет вид:
1.
![]() 2.
2.
![]() 3.
3.![]() 4.
4.![]() .
.
№39
Характеристическое уравнение системы
имеет вид:
![]() .
Будет ли устойчивой данная система:
.
Будет ли устойчивой данная система:
1. Да
2. Нет
№40
Критерий Гурвица является:
1. Необходимым и достаточным условием устойчивости.
2. Только необходимым условием устойчивости.
3. Только достаточным условием устойчивости.
№41
Характеристическое уравнение системы
имеет вид:
![]() .
Определитель Гурвица для этого уравнения
имеет вид:
.
Определитель Гурвица для этого уравнения
имеет вид:
1.
 2.
2. 3.
3.
 4.
4. .
.
№42
Характеристическое уравнение системы
имеет вид:
![]() .
Определитель Гурвица для этого уравнения
имеет вид:
.
Определитель Гурвица для этого уравнения
имеет вид:
1.
 2.
2.
 3.
3. 4.
4. .
.
№43
Характеристическое уравнение системы
имеет вид:
![]() .
Определитель Гурвица для этого уравнения
имеет вид:
.
Определитель Гурвица для этого уравнения
имеет вид:
1.
 2.
2. 3.
3. 4.
4.
 .
.
№44
Характеристическое уравнение системы
3-го порядка имеет вид:
![]() .
Необходимое и достаточное условие
устойчивости для этого случая имеет
вид:
.
Необходимое и достаточное условие
устойчивости для этого случая имеет
вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№45
Передаточная функция разомкнутой
системы имеет вид:
![]() .
Условие устойчивости замкнутой единичной
обратной связью САУ имеет вид:
.
Условие устойчивости замкнутой единичной
обратной связью САУ имеет вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.![]() .
.
№46
Передаточная функция разомкнутой
системы равна
![]() .
При каких значениях
.
При каких значениях![]() будет устойчива система, полученная
замыканием данной передаточной функции
единичной обратной связью:
будет устойчива система, полученная
замыканием данной передаточной функции
единичной обратной связью:
1.
![]() 3.
3.![]() ?
?
2.
![]() 4.
4.![]() .
.
№47
Передаточная функция разомкнутой
системы равна
![]() .
При каких значениях
.
При каких значениях![]() будет устойчива система, полученная
замыканием данной передаточной функции
единичной обратной связью:
будет устойчива система, полученная
замыканием данной передаточной функции
единичной обратной связью:
1.
![]() 3.
3.![]()
2.
![]() 4.
4.![]() .
.
№48
Передаточная функция разомкнутой
системы имеет вид:
![]() .
Условие устойчивости замкнутой единичной
обратной связью САУ имеет вид:
.
Условие устойчивости замкнутой единичной
обратной связью САУ имеет вид:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.
№49
Передаточная функция разомкнутой
системы имеет вид:
![]() .
Условие устойчивости замкнутой единичной
обратной связью САУ имеет вид:
.
Условие устойчивости замкнутой единичной
обратной связью САУ имеет вид:
1.
![]()
2.
![]()
3.
![]()
4.
![]() .
.