

Тесты по теории автоматического регулирования (ТАР). Кафедра “Системы автоматического управления” / ТАР тесты косвенные оценки(7)
.docПереходные процессы и косвенные оценки.
№1
Что определяют с помощью построенного процесса регулирования (убрать неправильный ответ):
1. Время регулирования
2. Колебательность
![]() системы.
системы.
3. Вид процесса (апериодический, колебательный).
4. Перерегулирование.
№2
Дифференциальное уравнение системы
имеет вид:
![]() .
При каком входном сигнале в момент
.
При каком входном сигнале в момент
![]() координата и ее производная
координата и ее производная
![]() не будут иметь разрывы первого рода:
не будут иметь разрывы первого рода:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.
![]() .
.
№3
В момент времени
![]() левые и правые начальные условия по
управляемой переменной и ее производным
не совпадают. Возможно ли в этом случае
аналитическое решение дифференциального
уравнения САУ и, если да, то как:
левые и правые начальные условия по
управляемой переменной и ее производным
не совпадают. Возможно ли в этом случае
аналитическое решение дифференциального
уравнения САУ и, если да, то как:
1. Решение невозможно.
2. Да, при этом в изображениях по Лапласу
производных функций
![]() должны учитываться левые начальные
условия.
должны учитываться левые начальные
условия.
3. Да, при этом в изображениях по Лапласу
производных функций
![]() должны учитываться левые начальные
условия по
должны учитываться левые начальные
условия по
![]() и правые по
и правые по
![]() .
.
4. Да, при этом в изображениях по Лапласу
производных функций
![]() должны учитываться правые начальные
условия по
должны учитываться правые начальные
условия по
![]() и левые по
и левые по
![]() .
.
№4
Дифференциальное уравнение системы
имеет вид:
![]() .
При каком входном сигнале в момент
.
При каком входном сигнале в момент
![]() координата или ее производная
координата или ее производная
![]() будут иметь разрывы первого рода:
будут иметь разрывы первого рода:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.
![]() .
.
№5
При частотном методе построения
переходного процесса управляемая
переменная определяется зависимостью
![]() .
В числителе подынтегрального выражения
на пустом месте находится:
.
В числителе подынтегрального выражения
на пустом месте находится:
1. Вещественная частотная характеристика замкнутой системы.
2. Вещественная частотная характеристика разомкнутой системы.
3. Мнимая частотная характеристика замкнутой системы.
4. Мнимая частотная характеристика разомкнутой системы.
№6
При частотном методе построения
переходного процесса управляемая
переменная определяется зависимостью
![]() .
В числителе подынтегрального выражения
на пустом месте находится:
.
В числителе подынтегрального выражения
на пустом месте находится:
1. Вещественная частотная характеристика замкнутой системы.
2. Вещественная частотная характеристика разомкнутой системы.
3. Мнимая частотная характеристика замкнутой системы.
4. Мнимая частотная характеристика разомкнутой системы.
№7
Дифференциальное уравнение САУ имеет
вид
![]() .
Входной сигнал
.
Входной сигнал
![]() .
В какие моменты времени возникают скачки
по управляемой переменной
.
В какие моменты времени возникают скачки
по управляемой переменной
![]() или
ее производной:
или
ее производной:
1. При
![]() 3.
При
3.
При
![]()
2. При
![]() и
и
![]() 4.
При
4.
При
![]() .
.
№8
Дифференциальное уравнение САУ имеет
вид
![]() .
Входной сигнал
.
Входной сигнал
![]() .
В некоторые моменты времени возникают
скачки по управляемой переменной
.
В некоторые моменты времени возникают
скачки по управляемой переменной
![]() или ее производной. Для выполнения
численного расчета переходного процесса
данное уравнение должно быть приведено
к виду:
или ее производной. Для выполнения
численного расчета переходного процесса
данное уравнение должно быть приведено
к виду:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.
![]() .
.
№9
Дифференциальное уравнение САУ имеет
вид
![]() .
Входной сигнал
.
Входной сигнал
![]() .
В некоторые моменты времени возникают
скачки по управляемой переменной
.
В некоторые моменты времени возникают
скачки по управляемой переменной
![]() или ее производной. Для выполнения
численного расчета переходного процесса
данное уравнение должно быть приведено
к виду:
или ее производной. Для выполнения
численного расчета переходного процесса
данное уравнение должно быть приведено
к виду:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.
![]() .
.
№10
АФЧХ замкнутой системы
![]() .
Установившееся значение переходной
характеристики
.
Установившееся значение переходной
характеристики
![]() равно:
равно:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.
![]() .
.
№11
АФЧХ замкнутой системы
![]() .
Достаточным условием того, что
перерегулирование %
не превышает 18%, является выполнение
условия:
.
Достаточным условием того, что
перерегулирование %
не превышает 18%, является выполнение
условия:
1.
![]() может быть представлена как разность
3 положительных не возрастающих функций
частоты.
может быть представлена как разность
3 положительных не возрастающих функций
частоты.
2.
![]() -
положительная не возрастающая функция
частоты.
-
положительная не возрастающая функция
частоты.
3.
![]() - положительная не возрастающая функция
частоты.
- положительная не возрастающая функция
частоты.
4.
![]() может быть представлена как разность
2 положительных не возрастающих функций
частоты.
может быть представлена как разность
2 положительных не возрастающих функций
частоты.
№12
Если ВЧХ замкнутой САУ является положительной не возрастающей функцией частоты, то:
1. Переходная характеристика
![]() является монотонно возрастающей
функцией.
является монотонно возрастающей
функцией.
2. Импульсная переходная функция
![]() является монотонно возрастающей
функцией.
является монотонно возрастающей
функцией.
3. В переходном процессе перерегулирование не превышает 18%.
4. Процесс регулирования будет заведомо немонотонной функцией времени.
№13
Для того, чтобы переходный процесс был монотонным достаточно, чтобы:
1. Вещественная частотная характеристика
![]() являлась положительной не возрастающей
функцией.
являлась положительной не возрастающей
функцией.
2. Производная
![]() была отрицательной, убывающей по модулю
функцией и
была отрицательной, убывающей по модулю
функцией и
![]() .
.
3. Производная
![]() была положительной, убывающей по модулю
функцией и
была положительной, убывающей по модулю
функцией и
![]() .
.
4. Вещественная частотная характеристика
![]() может быть представлена как разность
2 положительных не возрастающих функций
частоты.
может быть представлена как разность
2 положительных не возрастающих функций
частоты.
№14
Если вещественная частотная характеристика
![]() (
(![]() ,
,
![]() -
максимальное значение ВЧХ) может быть
представлена как разность 2 положительных
не возрастающих функций частоты, то:
-
максимальное значение ВЧХ) может быть
представлена как разность 2 положительных
не возрастающих функций частоты, то:
1. Переходная характеристика
![]() является монотонно возрастающей
функцией.
является монотонно возрастающей
функцией.
2. В переходном процессе перерегулирование не превышает 18%.
3. Перерегулирование
![]() не превышает
не превышает
![]() .
.
4. Процесс регулирования будет заведомо немонотонной функцией времени.
№15
Степень устойчивости
![]() это:
это:
1. Модуль вещественной части корня, ближайшего к вещественной оси.
2. Модуль вещественной части корня, ближайшего к мнимой оси.
3. Модуль мнимой части корня, ближайшего к мнимой оси.
4. Модуль мнимой части корня, ближайшего к вещественной оси.
№16
Характеристическое уравнение системы
имеет следующие корни:
![]() .
Степень устойчивости
.
Степень устойчивости
![]() равна:
равна:
1. -2 2. 0,6 3. 6 4. 1/2.
№17
Характеристическое уравнение системы
имеет следующие корни:
![]() .
Степень устойчивости
.
Степень устойчивости
![]() равна:
равна:
1. 1 2. 2,5 3. 1,2 4. -1.
№18
Пусть
![]() -
величина «коридора», определяющего
окрестность установившегося значения
управляемой величины, по которой
находится время регулирования
-
величина «коридора», определяющего
окрестность установившегося значения
управляемой величины, по которой
находится время регулирования
![]() ,
,
![]() - степень устойчивости. Приближенная
оценка времени регулирования имеет
вид:
- степень устойчивости. Приближенная
оценка времени регулирования имеет
вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.
![]() .
.
№19
Пусть
![]() -
величина «коридора», определяющего
окрестность установившегося значения
управляемой величины, по которой
находится время регулирования
-
величина «коридора», определяющего
окрестность установившегося значения
управляемой величины, по которой
находится время регулирования
![]() ,
,
![]() - степень устойчивости. При
- степень устойчивости. При
![]() приближенная оценка времени регулирования
имеет вид:
приближенная оценка времени регулирования
имеет вид:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.
![]() .
.
№20
Номограмма Солодовникова определяет:
1. Зависимость
перерегулирования
![]() и времени регулирования
и времени регулирования
![]() от максимального значения ВЧХ
от максимального значения ВЧХ
![]() .
.
2. Зависимость установившейся ошибки
от максимального значения ВЧХ
![]() .
.
3. Зависимость избытка по амплитуде и
избытка по фазе от максимального значения
ВЧХ
![]() .
.
4. Зависимость избытка по амплитуде и
избытка по фазе от минимального значения
ВЧХ
![]() .
.
№21
Характеристическое уравнение системы
третьего порядка имеет следующие корни:
![]() .
Колебательность системы
.
Колебательность системы
![]() определяется выражением:
определяется выражением:
1.
![]() 3.
3.
![]()
2.
![]() 4.
4.
![]() .
.
№22
С увеличением колебательности
![]() :
:
1. Колебания в системе затухают сильнее.
2. Затухание колебаний не зависит от этого параметра.
3. Апериодическая составляющая процесса регулирования затухает сильнее.
4. Колебания в системе затухают слабее.
№23
В системе заданы ограничения на степень
устойчивости
![]() ,
так что выполняется условие
,
так что выполняется условие
![]() и колебательность
и колебательность
![]() ,
так что выполняется условие
,
так что выполняется условие
![]() .
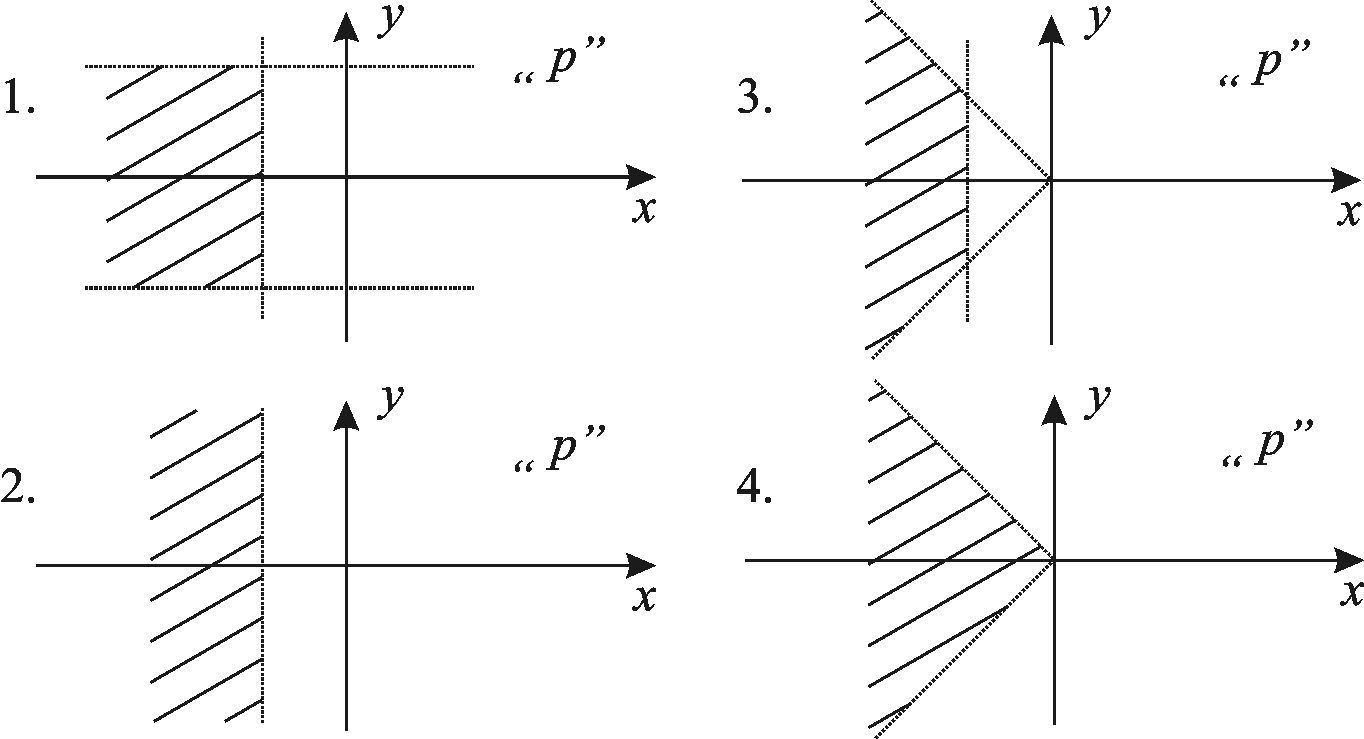
При этом область возможного расположения
корней характеристического уравнения
на комплексной плоскости «р» имеет
вид:
.
При этом область возможного расположения
корней характеристического уравнения
на комплексной плоскости «р» имеет
вид:
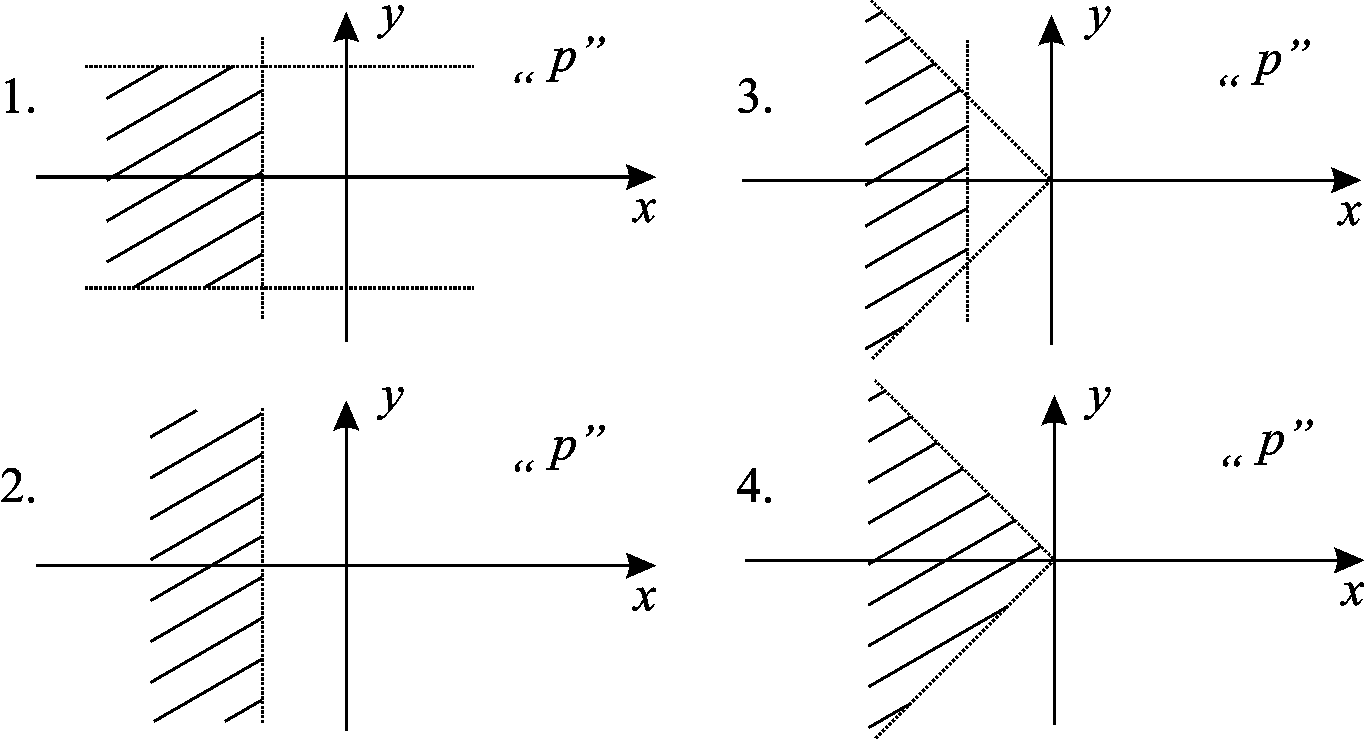 4
4
№24
В системе заданы ограничения на степень
устойчивости
![]() ,
так что выполняется условие
,
так что выполняется условие
![]() .
При этом область возможного расположения
корней характеристического уравнения
на комплексной плоскости «р» имеет
вид:
.
При этом область возможного расположения
корней характеристического уравнения
на комплексной плоскости «р» имеет
вид:
 2
2
№25
В системе заданы ограничения на
колебательность
![]() ,
так что выполняется условие
,
так что выполняется условие
![]() .При
этом область возможного расположения
корней характеристического уравнения
на комплексной плоскости «р» имеет
вид:
.При
этом область возможного расположения
корней характеристического уравнения
на комплексной плоскости «р» имеет
вид:
 4
4
№26
Характеристическое уравнение системы
имеет следующие корни:
![]() .
Колебательность системы
.
Колебательность системы
![]() равна:
равна:
1. 2 2. 16 3. 8 4. 4.
№27
Характеристическое уравнение системы
имеет следующие корни:
![]() .
Колебательность системы
.
Колебательность системы
![]() равна:
равна:
1. 21 2. 7/3 3. 3/7 4. 7.
№28
При выборе нулей и полюсов передаточной
функции
![]() системы желательно:
системы желательно:
1. Удалять нули передаточной функции от полюсов.
2. Относительное расстояние нулей и полюсов не влияет на переходные процессы в системе.
3. Сближать нули и полюсы передаточной функции.
4. Удалять нули друг от друга.