

2010_03_КР ТеорМех
.pdf
|
m |
l |
é |
æ |
π |
|
2π |
t3 |
|
x = u0t + |
|
2 |
|
êsinç |
|
+ |
|
||
m1 |
|
|
3 |
3 |
|||||
|
+ m2 ë |
è |
|
|
|||||
ö |
- sin |
π ù |
(6) |
|
÷ |
3 |
ú . |
||
ø |
|
û |
|
|
Полагая здесь t=1 с, найдем искомое перемещение х1.
Ответ: х1=0,33 м.
б) Определение ускорения а1.
Проделав те же рассуждения и выкладки, что и в предыдущем примере, получим уравнение (1) и формулу (2). Для определения а1 продифференцируем дважды по времени обе части равенства (2). Получим
|
|
|
|
& |
|
|
|
|
& |
|
|
|
|
|
2 |
æ |
π |
|
|
2π |
|
3 |
ö |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosç |
|
+ |
|
|
|
|
t |
|
÷ ; |
|
|
|
|
|
|
||||
|
|
MxC = ( m1 + m2 )x - 2m2lπt |
|
|
3 |
|
3 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|||
&& |
|
|
|
|
&& |
|
|
æ π |
|
2π |
|
|
3 |
ö |
|
|
|
|
2 |
|
|
4 |
|
|
æπ |
|
2π |
|
3 |
ö |
||||
|
+ m2 |
- 4m2lπt cosç |
|
|
+ |
|
t |
|
÷ + 4m2lπ |
|
t |
|
sinç |
|
+ |
|
t |
|
÷, |
|||||||||||||||
MxC = ( m1 |
)x |
3 |
3 |
|
|
|
|
3 |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
è 3 |
|
|
|
ø |
||||||
где x = a - ускорение тележки. Но согласно уравнению (1) |
|
|
Mx&&C = 0; в результа- |
|||||||||||||||||||||||||||||||
&& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
те находим следующую зависимость а от времени: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
m |
l |
|
é |
|
æ π |
|
2π |
|
|
ö |
|
|
|
|
|
|
æ |
π |
|
|
|
2π |
öù |
|
|
|
|
|
|||||
a = |
|
2 |
|
|
ê |
4πt cosç |
+ |
|
|
t3 ÷ |
- 4π 2t4 sinç |
|
|
+ |
|
|
|
|
|
t3 ÷ |
|
. |
|
|
|
|
||||||||
m |
+ m |
|
3 |
|
3 |
|
|
|
3 |
|
|
|
|
|
|
|||||||||||||||||||
|
2 |
|
è 3 |
|
|
|
ø |
|
|
|
|
|
|
è |
|
|
|
|
øú |
|
|
|
|
|
||||||||||
|
1 |
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
|
|
|
|
|
Полагая здесь t=1с, определим искомое уравнение а1.
Ответ: а1=–2,51 м/с2. Знак минус указывает на то, что ускорение тележки направлено влево.
в) определение скорости u1. Чтобы определить u1, воспользуемся теоремой об изменении количества движении системы Q в проекции на ось х. Так как
все действующие на систему внешние силы вертикальны (рис. Д5, б), то |
|
||||||||||
åFkx = 0 и теорема дает |
dQx |
= åFkxe = 0 , откуда Qx = C1 . |
(7) |
||||||||
|
|||||||||||
|
dt |
|
|||||||||
Для рассматриваемой механической системы |
|
= |
|
Т + |
|
D , где |
|
Т |
= m u , |
||
Q |
Q |
Q |
Q |
||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
Q D = m2 vD - количества движения тележки и груза D соответственно (u – скорость тележки, vD - скорость груза по отношению к осям Оху). Тогда из равенства (7) следует, что
Q |
Т + Q |
D = C |
1 |
или m u |
x |
+ m |
v |
Dx |
= C |
. |
(8) |
x |
x |
|
1 |
2 |
|
1 |
|
|
Для определения vDx рассмотрим движение груза D как сложное, считая
его движение по отношению к тележке относительным (это движение, совершаемое при вращении стержня AD вокруг оси А), а движение самой тележки – переносным. Тогда vD = vDпер + vDотн и
|
|
|
|
vDx = vDxпер + vDxотн . |
|
(9) |
|||
Но |
v |
Dпер = u |
и, следовательно, vDxпер = ux . Вектор |
v |
Dотн направлен перпенди- |
||||
|
|
|
отн |
= lωAD = lϕ = 2lπt |
2 |
. |
|
||
кулярно стержню и численно vD |
|
|
|
||||||
|
|
|
|
|
& |
|
|
|
|
Изобразив |
этот вектор на |
|
рис. Д5,б с учетом знака φ, найдем, что |
||||||
vотнDx = -vDотн cosϕ . Окончательно из равенства (9) получим
41
отн |
cosϕ = ux - |
2lπt |
2 |
|
æπ |
|
2π |
|
3 |
ö |
|
vDx = ux - vD |
|
cosç |
+ |
|
t |
|
÷ . |
(10) |
|||
|
3 |
|
|||||||||
|
|
|
|
|
è 3 |
|
|
|
ø |
|
|
(В данной задаче величину vDx можно еще найти другим путем, определив |
|||||||||||
абсциссу xD груза D, Для которой, как |
видно |
из |
рис. |
|
Д.2,а, |
получим |
|||||
xD = x − l sinϕ ; тогда vDx = x&D = x& − lϕ& cosϕ , где x& = ux , а ϕ& = 2πt 2 .)
При найденном значении vDx равенство (8), если учесть, что ux = u , примет вид
m1u + m2u - m2 2lπt |
2 |
æ |
π |
|
2π |
|
3 |
ö |
|
|
|
cosç |
|
+ |
|
t |
|
÷ |
= C1 . |
(11) |
|
|
3 |
3 |
|
|||||||
|
|
è |
|
|
|
ø |
|
|
Постоянную интегрирования С1 определим по начальным условиям: при t=0 и u=0. Подстановка этих величин в уравнение (11) дает C1 = ( m1 + m2 )u0 и
тогда из (11) получим
( m1 + m2 )u - m2 2lπt |
2 |
æ |
π |
|
2π |
|
3 |
ö |
|
|
|
|
cosç |
|
+ |
|
t |
|
÷ |
= ( m1 |
+ m2 |
)u0 . |
|
|
3 |
3 |
|
||||||||
|
|
è |
|
|
|
ø |
|
|
|
Отсюда находим следующую зависимость скорости u тележки от времени:
|
|
2lπm |
2 |
æ |
π |
|
2π |
|
ö |
|
||
u = u0 |
+ |
|
|
t 2 cosç |
|
+ |
|
t3 |
÷. |
(12) |
||
m1 |
+ m2 |
3 |
3 |
|||||||||
|
|
è |
|
|
ø |
|
||||||
Положив в уравнении (12) t=1с, определим искомую скорость u1.
Ответ: u1=– 0,76 м/с. Знак минус указывает, что скорость тележки направлена влево.
г) определение реакции N1. Для определения реакции N1 воспульзаемся теоремой о движении центра масс системы. Составим дифференциальное урав-
нение его движения в проекции на ось y (см. рис. Д2,а): |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
&& |
= |
e |
|
|
|
&& |
|
′ |
+ N |
′′ |
− P1 − P2 . |
|
|
|
|
(13) |
|||||||||||
|
MyC |
|
åFky |
или MyC = N |
|
|
|
|
|
|
|
|||||||||||||||||
Отсюда, полагая N ′ + N′′ = N , получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
N = M&y&C + P1 + P2 . |
yС |
|
|
|
|
|
|
|
|
|
(14) |
|||||||||||||
Из формулы, |
определяющей |
|
ординату |
|
центра масс системы |
|||||||||||||||||||||||
MyC = m1 yA + m2 yD , где |
yA и yD |
- соответственно ординаты центра масс А тележки и |
||||||||||||||||||||||||||
груза D. В нашем случае yA = A0 O = const , |
|
yD = A0O − l cosϕ . Тогда |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ π |
|
2π |
|
3 ö |
|
|
|
|
|
|||||
|
MyC = ( m1 |
+ m2 )A0O - m2l cosç |
|
|
|
+ |
|
|
t |
÷ . |
|
|
|
|
||||||||||||||
|
|
|
|
|
3 |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è 3 |
|
|
|
ø |
|
|
|
|
|
|||||
Продифференцировав обе части этого равенства два раза по времени, по- |
||||||||||||||||||||||||||||
лучим |
|
|
|
|
|
|
|
|
|
æ π |
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
& |
|
2m2lπt |
2 |
|
|
|
3 ö |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
= |
|
sinç |
|
+ |
|
|
|
|
|
t |
÷ ; |
|
|
|
|
|
|
|
|||||||
|
|
|
MyC |
|
|
|
3 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
è 3 |
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|||||
&& |
|
|
æ |
π |
|
2π |
|
|
3 |
ö |
|
|
|
2 |
|
4 |
|
|
æ π |
|
2π |
|
3 |
ö |
||||
= 4m2lπt sinç |
|
+ |
|
|
t |
|
÷ + 4m2lπ |
|
|
t |
|
|
cosç |
|
+ |
|
|
t |
|
÷ . |
||||||||
MyC |
3 |
3 |
|
|
|
|
|
|
|
|
3 |
|
||||||||||||||||
|
|
|
è |
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
è 3 |
|
|
|
|
ø |
||||
42

Подставив найденное выражение M&y&C в уравнение (8), получим зависимость N от t:
æ |
π |
|
2π |
|
3 |
ö |
|
2 |
|
4 |
æ |
π |
|
2π |
|
3 |
N = 4m2lπt sinç |
|
+ |
|
t |
|
÷ |
+ 4m2lπ |
|
t |
|
cosç |
|
+ |
|
t |
|
3 |
3 |
|
|
|
3 |
3 |
|
|||||||||
è |
|
|
|
ø |
|
|
|
|
è |
|
|
|
Полагая здесь t=1с, найдем искомую реакцию N1. Ответ: N1=68,9 Н.
ö |
+ ( m1 |
+ m2 |
)g . |
÷ |
|||
ø |
|
|
|
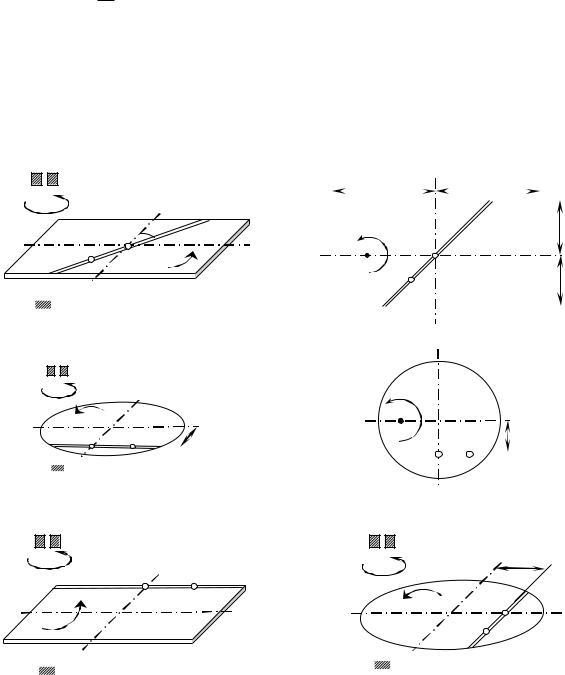
Задача Д3. Теорема об изменении кинетического момента системы.
Условие. Однородная горизонтальная платформа (круглая радиуса R или прямоугольная со сторонами R и 2R, где R = 1,2 м) массой m1=24 кг вращается с угловой скоростью ω0=10 с-1 вокруг вертикальной оси z, отстоящей от центра масс С платформы на расстоянии ОС=b (рис. Д3.0 – Д3.9, табл. Д3); размеры для всех прямоугольных платформ показаны на рис. Д3.0а (вид сверху).
В момент времени t0=0 по желобу платформы, начинает двигаться (под действием внутренних сил) груз D массой m2=8 кг по закону s=AD=F(t), где s выражено в метрах, t – в секундах. Одновременно на платформы, изображённые на рис. 0–4, начинает действовать пара сил с моментом М (задан в ньютонметрах; при M<0 его направление противоположно показанному на рисунках); для платформ, изображенных на рис. 5–9, М = 0.
Определить: для платформ, изображенных на рис. 0–4, зависимость ω=f(t), т. е. угловую скорость платформы, как функцию времени; для платформ, изображенных на рис, 5–9 – угловую скорость ω1 платформы в момент времени
t1=1 с.
Форма желоба на рис. 0–4 прямолинейная (желоб КE), на рис. 5, 6, 7 – окружность радиуса R (обод платформы), на рис 8, 9 – окружность радиуса r = 0,5 R. На всех рисунках груз D показан в положении, при котором s>0 (когда s<0, груз находится по другую сторону от точки А); на рис. 5–9 расстояние s=АО отсчитывается по дуге окружности. Изображая чертеж решаемой задачи, провести ось z на заданном расстоянии ОС=b от центра С.
Указания. Задача Д3 – на применение теоремы об изменении кинетического момента системы. При применении теоремы к системе, состоящей из платформы и груза, кинетический момент Кz системы относительно оси z определяется как сумма моментов платформы и груза. При этом следует учесть, что абсолютная скорость v груза складывается геометрически из относительной vот и переносной vпер скоростей, т.е. v = vот + vпер . Поэтому и количество движения
этого груза mv = mvот + mvпер . Тогда можно воспользоваться теоремой Варинь-
она (статика), согласно которой mz ( mv ) = mz ( mvот ) + mz ( mvпер ) ; эти моменты вычисляются так же, как моменты сил. Подробнее ход решения для случая, когда надо ω=f(t), разъяснен в примере Д3.
В случае, когда М = 0 и надо определить ω1, воспользоваться законом сохранения кинетического момента (показав, что он здесь имеет место). При этом
43
следует сначала найти и показать на чертеже положения D0 и D1 груза в моменты времени t0=0 и t1=1c (найти, чему равен угол ACD при t0=0 и t1=1c), а также определить, чему равна и как направлена скорость vот в эти моменты времени. После этого, так же как в примере Д3, надо вычислить Кz, но не для произвольного момента времени, а сначала для момента t0=0 (когда груз в положении D0 и ω=ω0), а затем для момента t1=1c (когда груз в положении Dt и ω=ω1) и использовать закон сохранения Кz.
Момент инерции прямоугольной пластины с массой m и сторонами а1 и а2 относительно оси Сz, перпендикулярной пластине и проходящей через ее центр
масс С, равен 12m ( a12 + a22 ) .
При решении задачи полезно изобразить на вспомогательном чертеже вид на платформу сверху (с конца оси z), как это сделано в качестве примеров
для рис. Д3.0 и Д3.1 |
(рис. Д3.0а и Д3.1а). |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунки к заданию Д3 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
ωo |
|
|
|
|
|
|
K |
|
|
|
|
|
|
R |
|
|
R |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
O |
|
|
C |
300 |
|
|
|
|
|
|
|
ωo |
|
300 |
|
|
K |
|
|
|
R/2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
A |
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
E |
|
|
|
|
O |
D |
A |
|
|
|
|
|
|
|
R/2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д 3.0 |
|
|
|
|
|
|
|
|
|
|
Рис. Д 3.0а |
||||||||||||||
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
M |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
R/2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
K |
O |
|
A |
D |
|
|
|
R/2 |
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
A |
|
|
E |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д 3.1 |
|
|
|
|
|
|
|
|
|
|
Рис. Д 3.1а |
||||||||||||||
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
ωo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωo |
|
|
|
|
R/2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
K |
|
|
A |
|
|
|
|
D |
Е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
O |
|
M |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
A K |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
C |
|
|
D |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д 3.2 |
|
|
|
|
|
|
|
|
|
|
Рис. Д 3.3 |
||||||||||||||
44

z |
|
|
z |
|
|
|
|
ωo |
|
|
ωo |
|
|
|
|
|
Е |
|
D |
|
|
|
|
D |
|
||
O |
M |
|
|
|
||
A |
O |
C |
A |
|||
|
C |
|||||
|
|
K |
|
|
|
|
Рис. Д 3.4 |
|
|
|
Рис. Д 3.5 |
|
z |
|
|
|
z |
|
ωo |
|
|
|
ωo |
|
A |
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
O |
|
|
|
|
C |
|
|
O |
|
|
|
|
|
|
D |
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
Рис. Д 3.6 |
|
|
|
Рис. Д 3.7 |
|
|
z |
|
z |
|
|
|
|
ωo |
|
ωo |
|
|
|
|
|
|
|
|
|
|
|
D |
A |
r |
O |
|
A |
r |
D |
C |
|
|
O |
C |
|
|
|
|
|
|
|
Рис. Д 3.8 |
|
|
|
Рис. Д 3.9 |
Таблица Д3
Номер усло- |
вия |
|
Рис. 0–4 |
|
|
Рис. 5–7 |
|
|
Рис. 8,9 |
|||||||
b |
s=f(t) |
M |
|
|
|
s |
= f (t ) |
|
|
s |
= f (t ) |
|||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
R |
0,6cos(2t) |
8 |
|
|
|
πR |
(t2-1) |
|
πR |
|
(4t2-1) |
|||
|
|
|
6 |
|
3 |
|||||||||||
1 |
|
R/2 |
0,8t2 |
2+4t |
|
πR |
|
(4t2-1) |
|
πR |
|
(2-5t2) |
||||
|
3 |
6 |
||||||||||||||
2 |
|
R |
0,4(1-t3) |
8t2-2 |
|
|
πR |
(4-t2) |
|
πR |
|
(7t2-4) |
||||
|
|
6 |
6 |
|||||||||||||
|
|
|
- |
|
|
πR |
2 |
|
πR |
2 |
||||||
3 |
|
R/2 |
0,8cos(2t) |
-12 |
|
3 |
|
|
(t +2) |
|
4 |
|
(1+t ) |
|||
4 |
|
R |
0,4t3 |
-6t2 |
|
πR |
(5t2-2) |
|
|
πR |
(4-t2) |
|||||
|
6 |
6 |
||||||||||||||
5 |
|
R/2 |
-0,6t2 |
12t |
|
|
πR |
(1-t2) |
|
πR |
(4-7t2) |
|||||
|
|
3 |
6 |
|||||||||||||
45
6 |
R |
0,4cos(3t) |
10 |
|
|
πR |
|
(t2+2) |
|
πR |
(5t2-1) |
|||
|
6 |
|
3 |
|||||||||||
7 |
R/2 |
0,6(2-t2) |
6t |
|
πR |
(1-4t2) |
|
πR |
(3t2-1) |
|||||
6 |
4 |
|||||||||||||
|
|
- |
|
|
πR |
2 |
|
πR |
2 |
|||||
8 |
R/2 |
0,5cos(3t) |
12 |
|
6 |
|
(7t -4) |
|
6 |
|
(2+t ) |
|||
9 |
R |
0,8(t3+1) |
-9t2 |
|
|
2πR |
(t2-1) |
|
|
πR |
(1-t2) |
|||
|
3 |
3 |
||||||||||||
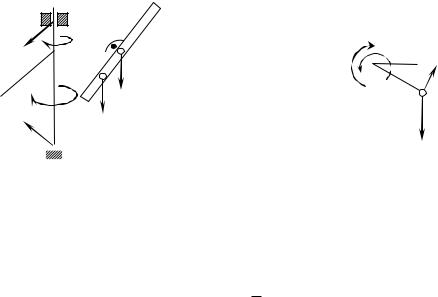
Пример Д3. Горизонтальная трубка АВ массой m1 (рис. Д.6а) с помощью стержня ОС жестко скреплена с вертикальным валом ЕН, который вращается вокруг оси z с угловой скоростью ω0 (на рис. Д3.б показан вид сверху). В середине С трубки находится шар D массой m2. В момент времени t0=0 на вал начинает действовать вращающий момент М (момент относительно оси z) и одно-
временно шар начинает двигаться вдоль трубки по закону CD=s=f(t).
Дано: m1=15 кг; m2= 10 кг, АС= СВ=СО =l=1 м, ω0=2c-1, s=0,4t2 (s – в мет-
рах; t – в секундах), М=kt где k =6 Н∙м/с.
Определить: ω= f(t) —закон изменения угловой скорости трубки, пренебрегая массой стержня ОС и вала.
Решение. Рассмотрим механическую систему, состоящую из трубки АВ и шара D. Для определения ω применим теорему об изменении кинетического момента системы относительно оси z:
|
|
|
|
|
|
|
|
|
|
dKz |
= åmz ( |
|
|
|
|
|
|
|
(1) |
|||
|
|
|
|
|
|
|
|
|
|
Fke ). |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
z |
H |
|
A |
|
|
|
A |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
RH |
|
|
|
|
|
|
ωo |
|
|
|
y |
|
M |
ωo |
|
C y |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
D |
O |
|
|
|
|
|||||||||
x |
|
|
|
|
|
|
|
|
|
O |
S |
|
vпер |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
M |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
||||||||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
B |
|
|
|
||
|
RE |
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vот |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д3.а |
|
|
Рис. Д3.б |
||||||||||||||
Изобразим действующие на систему внешние силы: силы тяжести Р1, Р2, реакции RЕ, RН и вращающий момент М. Так как силы Р1 и Р2, параллельны оси z, а реакции RЕ и RН эту ось пересекают, то их моменты относительно оси z равны нулю. Тогда, считая для момента положительны направление ω0 (т.е. против хода часовой, стрелки), получим åmz( Fke ) = −M = −kt и уравнение (1) примет та-
кой вид:
dKz |
= −kt . |
(2) |
|
dt |
|||
|
|
46

Умножая обе части этого уравнения на dt и интегрируя, получим
|
|
|
Kz = - |
k |
t2 |
+C1 . |
|
|
|
(3) |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
2 |
|
|
|
|
|
|
|
Для рассматриваемой механической системы |
|
|
|
||||||||
|
|
|
Kz |
= Kzтр + KzD , |
|
|
|
(4) |
|||
где Kzтр и KzD кинетические |
моменты |
трубки и шара D соответственно. |
|||||||||
Так как трубка вращается вокруг оси z, то Kzтр = Jzω . Значение Jz найдем |
|||||||||||
по теореме Гюйгенса: J |
z |
= J ' + m ( OC )2 = J ' + m l2 |
( J |
Cz |
' – момент инерции отно- |
||||||
|
|
Cz |
1 |
|
|
Cz |
1 |
|
|
||
сительно оси z’ , параллельной оси z и проходящей через центр масс С трубки). Рассматривая трубку как однородный стержень длиной АВ=2l, получим
J ' = |
m1( 2l )2 |
= |
m1l2 |
|
и Jz = |
m1l2 |
+ m1l2 |
= |
4 |
m1l2 . |
||
|
|
|
|
|||||||||
Cz |
12 |
3 |
|
3 |
|
3 |
|
|||||
Следовательно, |
|
|
|
|||||||||
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
Kzтр = |
|
m1l2ω . |
|
(5) |
||||||
|
|
3 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||
Для определения KzD обратимся к рис. Д3.б и рассмотрим движение шара D как сложное, считая его движение по трубке относительным, а вращение самой трубки вокруг оси z – переносным движением. Тогда абсолютная скорость
шара |
v |
= |
v |
от |
+ v |
пер |
. Поскольку шар |
D движется по закону s=CD=0,4t2 , то |
|||||
vот |
= s = 0,8t |
|
|
|
|
на рис. Д3.б с учетом знака s (при s<0 на- |
|||||||
; изображаем вектор vот |
|||||||||||||
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
правление vот было бы противоположным). Затем, учитывая направление ω,
изображаем вектор |
v |
пер ( |
v |
пер |
┴ OD); численно |
v |
пер = ω ∙OD. Тогда, по теореме Ва- |
||||||||||||||
риньона, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
K D = m |
( m |
v |
) = m ( m |
v |
)+ m ( m |
v |
) = |
|
|||||||||||
|
|
z |
z |
|
2 |
|
|
z |
2 от |
|
|
z |
2 пер |
|
|||||||
|
|
= -m |
v |
|
|
×OC + m |
v |
×OD = -m ×0,8tl + m ω(OD )2 . |
(6) |
||||||||||||
|
|
|
2 от |
2 |
пер |
|
|
|
2 |
2 |
|
||||||||||
Но из рис. Д3.б видно, что OD2 |
= l2 + s2 |
= l2 +0,16t4 . Подставляя эту величину |
|||||||||||||||||||
в равенство (6), а затем значения Kzтр и KzD из (6) и (5) в равенство (4), получим с учетом данных задачи
Kz = |
4 |
m1l2ω + m2ω( l2 + 0,16t4 ) - m2 |
×0,8tl |
= ( 30 |
+ 1,6t4 )ω - 8t . |
(7) |
3 |
||||||
Тогда уравнение (3), где k=6, примет вид |
|
|
|
|
||
|
|
( 30 + 1,6t4 )ω - 8t = -3t2 + C1 . |
|
(8) |
||
Постоянную интегрирования определяем по начальным условиям: при t=0, ω0=0. Получим C1=30, ω0 = 60. При этом значении С1 из уравнения (8) находим искомую зависимость ω от t.
Ответ: ω = (60 + 8t - 3t2 ) /( 30 + 1,6t4 )c−1 (где t в секундах).
47
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА.
1.Тарг С.М. Краткий курс теоретической механики. Учебник для втузов, М.: Высш. шк., 2000-415с. (и другие годы издания)
2.Яблонский А. А., Никифорова В. М. Курс теоретической механики. Учебник для вузов, М., Ч.1., 2 , 1998.-343с. (и другие годы издания)
3.Шацкий В.П., Гулевский В.А. Краткий курс теоретической механики. ВГАУ, 2010 – 179с.
4.Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. Т. 1,2 – М., 1975г (и более поздние годы издания)
5.Сборник заданий для курсовых работ по теоретической механике: Учеб. пособ. Для техн. вузов. – 5-е изд., исп.–М.: Интеграл-Пресс, 2000.–384 с.
48
Подписано в печать 20.04.2010 г. Формат 60х841/16 Бумага кн.-журн. Усл. п.л. 3,0. Гарнитура Таймс.
Тираж 110 экз. Заказ №4385
Федеральное государственное образовательное учреждение высшего профессионального образования
«Воронежский государственный аграрный университет имени К.Д. Глинки» Типография ФГОУ ВПО ВГАУ 394087, Воронеж, ул. Мичурина, 1 Информационная поддержка: http://tipograf.vsau.ru
Отпечатано с оригинал-макета заказчика. Ответственность за содержание предоставленного оригинал-макета типография не несет.
Требования и пожелания излагайте авторам данного издания.
49