

2010_03_КР ТеорМех
.pdfставляя по три уравнения равновесия и учитывая при изображении реакций в точке В аксиому о равенстве действия и противодействия; 2) сначала рассмотреть равновесие всей конструкции, составляя для нее три уравнения равновесия, а затем рассмотреть равновесие какой-либо из частей конструкции, составляя для него тоже три уравнения равновесия.
Оси координат Аxy указаны на рисунках.
Составляя условия равновесия желательно учесть, что уравнение моментов будет более простым (содержать меньше неизвестных), если брать моменты сил относительно точек, где пересекаются линии действия двух реакций связей. При вычислении момента сил, не параллельных осям координат часто удобно разложить их на составляющие параллельно осям координат, и воспользоваться теоремой Вариньона: mO (F ) = mO (Fx ) + mO (Fy ) .
|
|
|
|
|
|
|
|
|
|
|
Таблица С2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Последняя цифрашифра |
|
|
|
|
Исходные данные |
|
|
|
|
|||
G , Н |
|
|
|
P , Н |
× |
q |
, Н/м |
b |
, град |
|
a |
|
|
F , Н |
|
||||||||||
|
М, Н м |
|
|
|
|
, град |
||||||
|
|
|
|
|
|
|
|
|
|
|
||
0 |
15 |
10 |
40 |
10 |
|
12 |
|
30 |
|
45 |
||
|
|
|
|
|
|
|
|
|
|
|
||
1 |
25 |
20 |
30 |
20 |
|
8 |
|
45 |
|
60 |
||
|
|
|
|
|
|
|
|
|
|
|
||
2 |
35 |
30 |
20 |
30 |
|
6 |
|
60 |
|
45 |
||
|
|
|
|
|
|
|
|
|
|
|
||
3 |
15 |
40 |
10 |
40 |
|
4 |
|
45 |
|
30 |
||
|
|
|
|
|
|
|
|
|
|
|
||
4 |
25 |
10 |
40 |
50 |
|
2 |
|
30 |
|
45 |
||
|
|
|
|
|
|
|
|
|
|
|
||
5 |
35 |
20 |
30 |
60 |
|
12 |
|
45 |
|
60 |
||
|
|
|
|
|
|
|
|
|
|
|
||
6 |
15 |
30 |
20 |
70 |
|
8 |
|
60 |
|
45 |
||
|
|
|
|
|
|
|
|
|
|
|
||
7 |
25 |
40 |
10 |
80 |
|
6 |
|
45 |
|
30 |
||
|
|
|
|
|
|
|
|
|
|
|
||
8 |
35 |
10 |
40 |
9 |
|
4 |
|
30 |
|
45 |
||
|
|
|
|
|
|
|
|
|
|
|
||
9 |
15 |
20 |
30 |
10 |
|
2 |
|
45 |
|
60 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
11
|
|
|
|
|
|
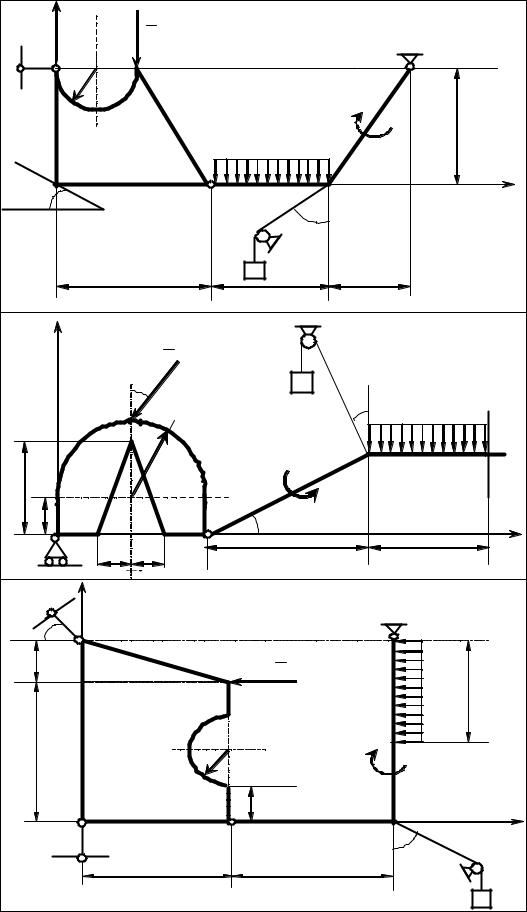
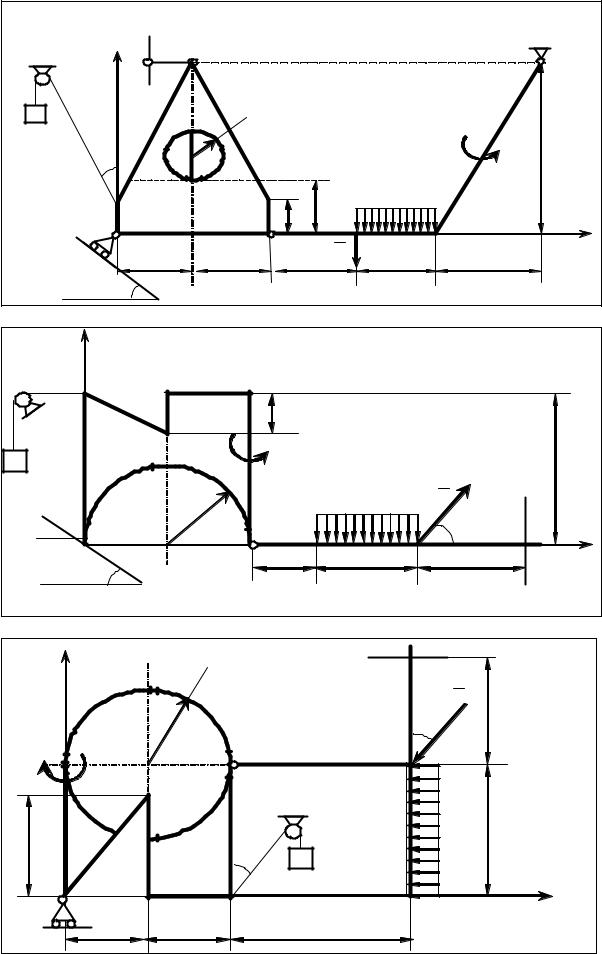
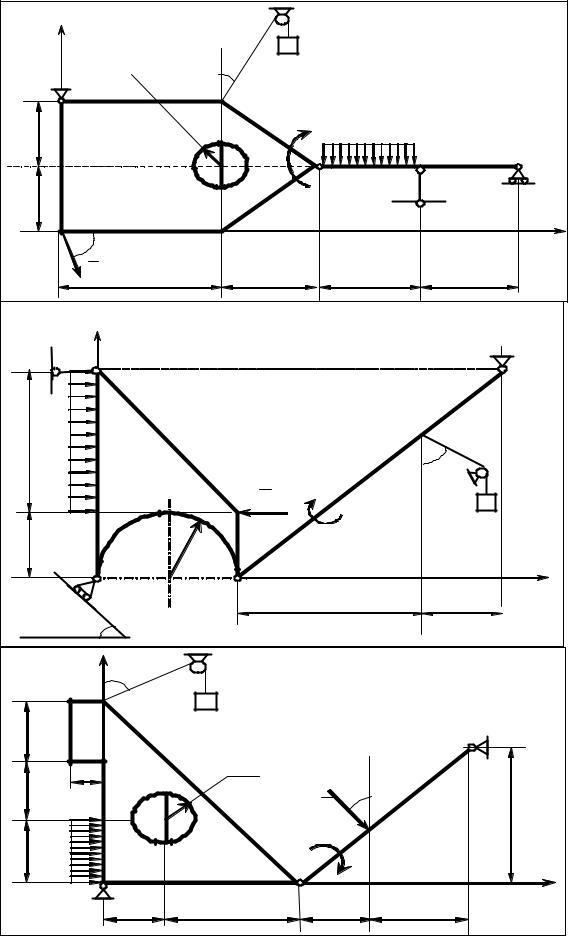
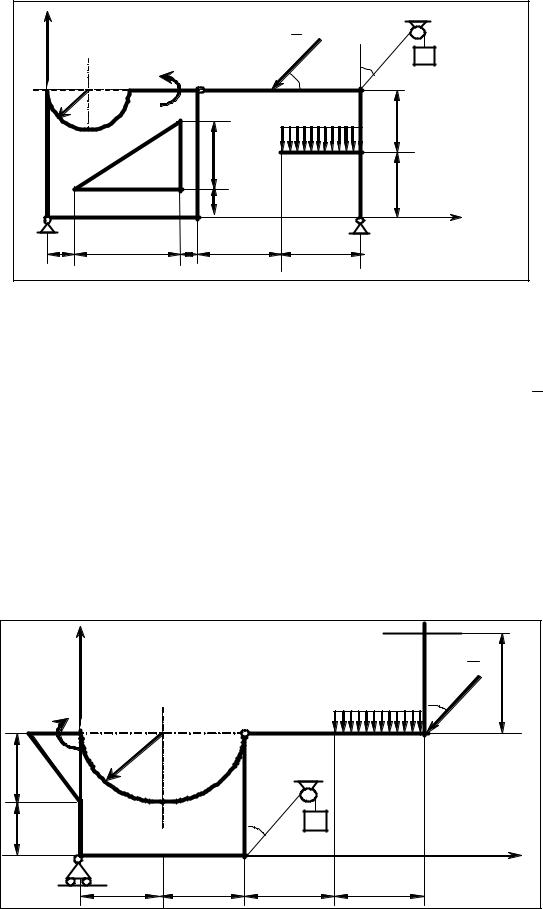
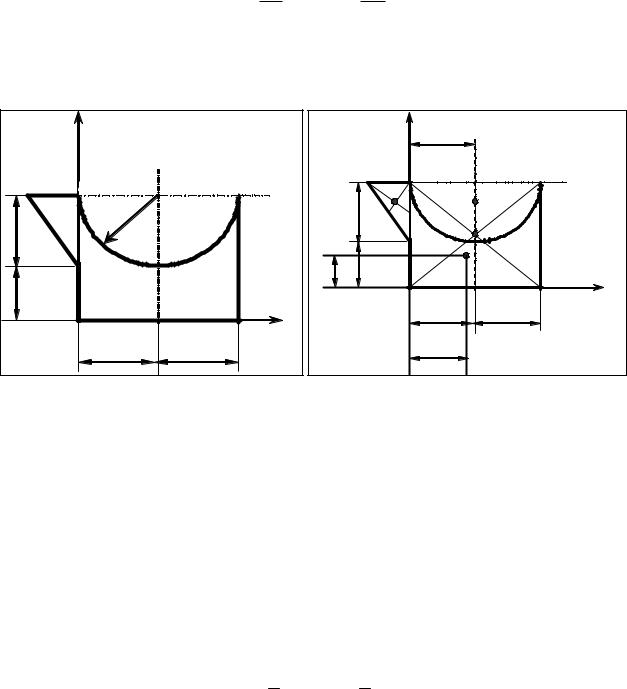
Рисунки к заданию С2 |
y |
|
F |
|
|
|
С 2 .0 |
|
|
|
|
|
|
|
D |
|
|
|
|
|
Е |
|
R 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
10 |
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
А |
|
|
|
|
|
x |
|
|
|
|
|
|
|
α |
|
|
|
В |
β |
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
12 |
|
|
9 |
5 |
|
|
y |
|
|
|
|
С2.1 |
|
|
|
F |
|
|
|
|
|
α |
|
P |
β |
|
|
D |
|
R5 |
|
q |
|
|
|
|
|
|||
6 |
|
|
|
|
|
Е |
|
|
|
|
M |
|
|
2 |
|
|
|
30° |
x |
|
|
|
|
|
|||
А |
|
|
|
|
||
2 |
2 |
В |
10 |
|
9 |
|
|
|
|
||||
|
y |
|
|
|
|
С2.2 |
α |
D |
|
|
|
Е |
|
2 |
|
|
|
F |
|
q |
|
|
|
|
|
||
|
|
|
|
|
|
7 |
10 |
|
|
|
R3 |
M |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
x |
|
А |
|
|
В |
|
|
|
|
9 |
|
11 |
|
β |
|
|
|
|
|
||
|
|
|
|
|
|
P |
|
|
|
|
|
12 |
|
|
|
|
|
|
|
С2 .3 |
y |
D |
|
|
|
|
Е |
|
|
|
|
|
||
|
|
|
|
|
|
|
P |
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
|
|
|
15 |
|
|
|
|
|
M |
|
|
|
|
|
q |
|
|
А |
|
|
3 |
|
|
|
|
2 |
|
|
x |
||
|
|
|
|
|||
|
|
|
|
|
||
4 |
4 |
В |
|
F |
|
|
|
|
|
|
|
||
α |
|
|
5 |
5 |
|
7 |
y |
|
|
|
|
|
С2.4 |
|
D |
|
|
|
|
|
|
|
3 |
|
|
|
|
P |
|
M |
|
|
|
12 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
R6 |
|
|
q |
F |
|
|
|
|
α |
Е |
||
А |
|
|
|
|
||
β |
В |
3 |
|
5 |
5 |
x |
|
|
|
y |
R3 |
|
|
С2.5 |
|
|
|
|
|
|
|
Е |
F |
4 |
M |
|
|
α |
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
q |
5 |
4 |
β |
P |
|
|
А |
D |
8 |
|
x |
3 |
3 |
|
|
|
|
|
13 |
|
|
y |
|
|
|
|
|
С 2.6 |
|
|
|
P |
|
|
|
|
|
|
β |
|
|
|
|
|
R1,5 |
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
4,5 |
|
|
|
M |
q |
|
|
|
|
|
Е |
||
|
|
|
|
|
|
|
4 ,5 |
|
|
|
В |
|
|
|
|
|
|
|
|
|
А |
α |
|
|
|
|
x |
|
F |
1 0 |
|
6 |
5 |
5 |
|
|
|
||||
|
|
|
|
|
|
С 2.7 |
|
y |
|
|
|
|
|
|
|
D |
|
|
|
Е |
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
M |
|
β |
|
|
|
|
|
|
|
|
|
|
|
F |
|
P |
|
|
|
|
|
|
|
6 |
А |
|
R 6 |
|
|
|
|
|
|
|
x |
||
|
|
|
|
|
|
|
|
|
|
В |
9 |
|
6 |
|
|
|
|
|
||
|
α |
|
|
|
|
|
|
y |
β |
|
|
|
С2 .8 |
|
|
P |
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
Е |
|
|
|
|
|
|
|
4 |
2 |
|
R 2 |
α |
|
|
|
|
|
|
|
||
|
|
|
|
F |
|
9 |
|
|
|
|
|
|
|
q |
|
|
|
M |
|
|
4 |
|
|
|
|
|
|
|
А |
4 |
8 |
В |
|
x |
|
|
4 |
|
5 |
||
|
|
|
|
14 |
|
|
y |
|
|
|
|
|
С 2 .9 |
|
|
|
|
F |
|
P |
|
|
|
M |
В |
β |
|
D |
R 3 |
|
α |
|
||
|
|
|
||||
|
|
|
|
|
||
|
|
|
|
q |
|
6 |
|
|
|
|
7 |
|
|
|
|
|
|
|
|
6 |
|
|
|
|
2 |
Е |
x |
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
9 |
1 |
4 |
4 |
|
Пример С2.
Дано: На рис. С2.1 показана схема конструкции, состоящей из тела ADB веса G и невесомой части BE . Способ соединения конструкции – шарнир В. Конструкция закреплена с помощью шарнирной опоры на катках и жесткой заделки. На конструкцию кроме силы тяжести действуют сосредоточенная сила F , подвешенный груз веса P , пара сил с моментом М и равномерно распределенная нагрузка интенсивности q . F = 4 Н, P = 16 Н, M = 5 кН×м, q = 2 кН/м, G = 12
Н, α = 30o , β = 45o .
Найти:
1.положение центра тяжести тела ADB (точка С с координатами (xC ,yC ), в которой приложен вес тела G );
2.реакции опор в точках А и Е;
3.давление в соединительном шарнире B ;
|
y |
|
|
Е |
|
|
|
|
|
F |
5 |
|
M |
|
q |
α |
|
D |
|
В |
|
|
|
|
|
|
|
||
3 |
R 3 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
β |
|
|
|
|
P |
|
x |
|
|
|
|
|
||
|
А |
|
4 |
|
|
|
3 |
3 |
4 |
|
|
|
|
|
|||
|
|
|
Рис. С2.1 |
|
|
|
|
|
15 |
|
|
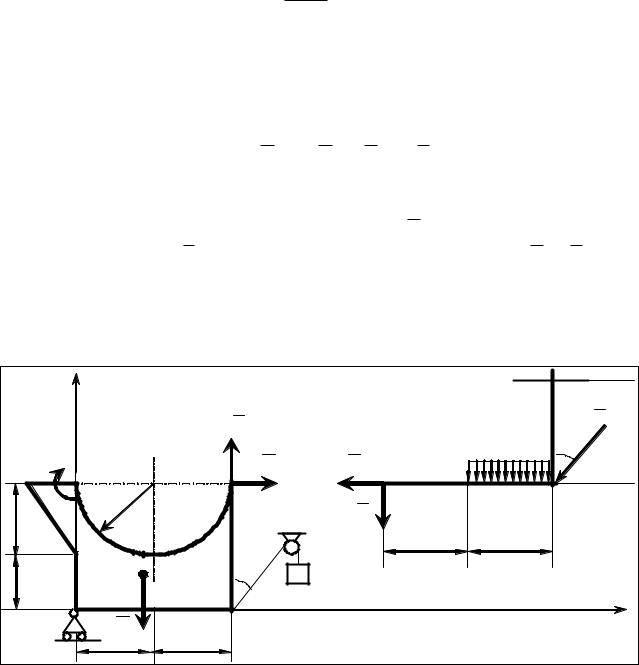
Решение: 1) Рассмотрим тело ADB для определения положения его цен- |
||||||||||||
тра тяжести. Оси координат Аxy заданы на рис. С2.1. Координаты центра тяже- |
||||||||||||
сти плоской фигуры определяем по формулам |
|
|
|
|
|
|||||||
|
|
|
xC = |
Sy |
; |
yC = |
S |
x , |
|
|
|
(1) |
|
|
|
S |
|
|
|
|
|||||
|
|
|
|
|
|
S |
|
|
|
|
||
где Sy |
= åSi xi , |
Sx |
= åSi yi |
– |
статические моменты фигуры относительно |
|||||||
осей координат y и x, S – площадь всей фигуры. |
|
|
|
|
||||||||
|
y |
|
|
|
|
|
|
y |
R3 |
|
|
|
D |
K |
O |
В |
|
|
|
D |
|
K |
O |
В |
|
|
|
|
|
С2 |
|
С3 |
|
|
||||
|
R3 |
|
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
3 |
|
|
С1 |
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
L |
|
|
|
|
yС |
3 |
|
|
С |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
А |
|
N |
H |
|
||
|
|
|
x |
|
|
|
|
x |
||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
3 |
3 |
||
|
А |
N |
H |
|
|
|
|
|
|
|||
|
|
|
|
|
хС |
|
|
|||||
|
3 |
|
3 |
|
|
|
|
|
|
|
||
|
Рис. С2.2 |
|
|
|
|
|
|
Рис. С2.3 |
|
|||
Разделим плоскую фигуру на более простые, для которых легко опреде- |
||||||||||||
ляются площади Si |
и координаты центров тяжести xi |
и yi . Для нашей фигуры |
||||||||||
такими частями будут прямоугольник |
AKBH , треугольник LKD и полукруг |
|||||||||||
(рис. С2.2). Так как полукруг вырезан из прямоугольника, то его площадь счи- |
||||||||||||
таем отрицательной. |
|
|
|
|
|
|
|
|
|
|
||
1.Прямоугольник AKBH : площадь: S1 = AH ×FH = 6×6 = 36 см2 и коорди-
наты центра тяжести x1 = AH / 2 = 3 см , |
y1 = HD / 2 = |
3 см . |
||
2. Треугольник LKD : площадь S2 = |
1 |
LK ×KD = |
1 |
3×2 = 3 см 2 и координа- |
2 |
|
|||
|
2 |
|
||
ты центры тяжести x2 = −(LK / 3) = −1 см , |
y2 = AK − KD / 3 = 5 см . |
|||
3.Полукруг: площадь S3 = - 12 p×R 2 = - 12 3,14 ×32 = -14,13 см 2 отрицатель-
на так как полукруг вырезан. Так как полукруг симметричная фигура относи-
тельно прямой ОN , |
то |
координата x3 центра тяжести данной части |
||||
x3 = 3 см , y3 = ON - |
4R |
= ON - |
|
4×3 |
= 6 -1,28 = 4,72 см . |
|
3p |
3 |
×3,14 |
||||
|
|
|
||||
Для удобства занесем расчетные данные в таблицу:
16
Простая |
2 |
xi , см |
yi , см |
2 |
2 |
фигура |
Si , см |
Siy = Si xi , см |
Six = Siyi , см |
||
AKBH |
36 |
3 |
3 |
108 |
108 |
LKD |
3 |
–1 |
5 |
–3 |
15 |
полукруг |
–14,13 |
3 |
4,72 |
–42,39 |
–66,7 |
å |
24,87 |
– |
– |
62,61 |
56,3 |
|
По формулам (1) получаем |
|
|
|
|
|
|
|||
|
xC = |
62,61 |
= 2,52 см , |
yC = |
56,3 = 2,27 см , |
|
(2) |
|||
|
|
24,87 |
|
|
|
24,87 |
|
|
|
|
Центр тяжести С указан на рис. С2.3. Вес тела ADB приложен в этой точке. |
||||||||||
|
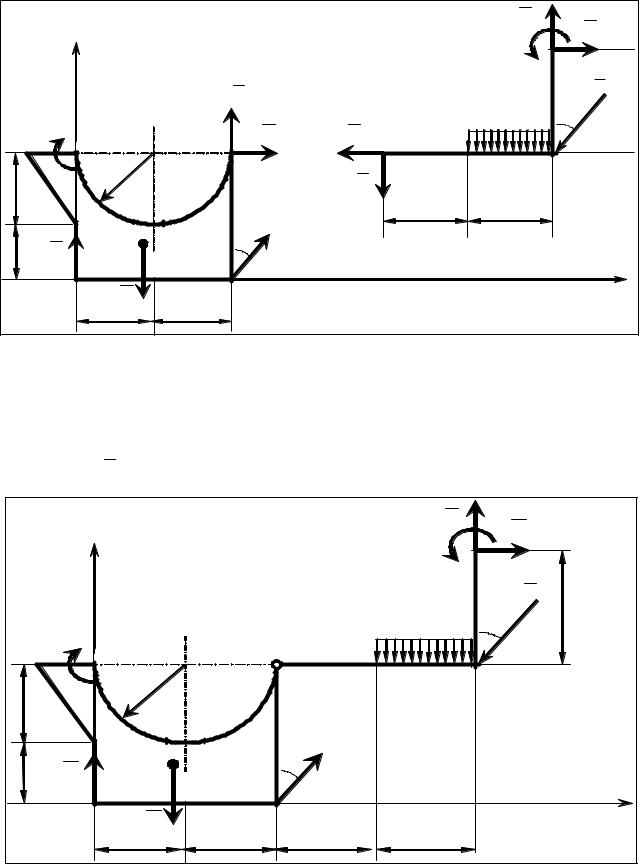
2) Определим реакции опор заданной конструкции. Для этого разобьем |
|||||||||
систему на две части ADB и BE и рассмотрим равновесие каждой из частей |
||||||||||
отдельно, |
составляя для них по три уравнения равновесия. |
|
|
|||||||
|
Будем учитывать при изображении реакций в точке В аксиому о равенст- |
|||||||||
|
|
|
|
|
|
′ |
|
′ |
тела ADB , прило- |
|
ве действия и противодействия XB = −XB , |
YB = −YB . Вес |
|||||||||
жим в точке С, с найденными координатами (xC ,yC ) (рис. С2.4). |
|
|||||||||
|
Освободим каждую из рассматриваемых частей от связей и заменим их |
|||||||||
реакциями. Катковую опору |
в точке А реакцией RA , нить перекинутую через |
|||||||||
блок в точке Н силой P , жесткую заделку в точке Е реакциями XE , YE |
и мо- |
|||||||||
ментом M E (рис. С2.5). Далее составляем для каждой из частей системы по три |
||||||||||
уравнения равновесия, аналогично решению задачи С1. Полученные 6 уравне- |
||||||||||
ний объединяем в систему, из которой определяем неизвестные реакции. |
|
|||||||||
|
|
y |
|
|
|
|
|
|
Е |
|
|
|
|
|
YB |
|
|
|
|
|
F |
|
|
|
|
|
|
|
q |
α |
5 |
|
D |
M |
|
|
X |
|
X |
′ |
|||
|
В |
B |
В |
|
|
|||||
|
|
|
|
B |
|
|
||||
3 |
|
R3 |
|
|
|
YB′ |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
β |
|
|
|
4 |
|
|
3 |
|
С |
|
|
|
|
|
|
x |
|
|
|
|
P |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
|
А |
G |
|
|
|
|
|
|
|
|
|
|
3 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. С2.4 |
|
|
|
|
|
|
|
|
|
|
17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
YE |
|
X E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
M A |
Е |
|
|
|
|
|
|
|
|
|
|
|
|
F |
||
|
|
|
|
|
YB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
α |
5 |
|
D |
M |
|
|
|
X |
|
X |
′ |
|
|
|||
|
|
В |
B |
В |
|
|
|
|
|||||
|
|
|
|
|
B |
|
|
|
|
||||
3 |
|
R3 |
|
|
|
|
YB′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
4 |
|
|
||
|
|
|
|
|
β |
P |
|
|
4 |
|
|
||
3 |
R A |
С |
|
|
|
|
|
|
|
|
x |
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
А |
G |
|
3 |
Н |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. С2.5 |
|
|
|
|
|
|
|
|
Для ПРОВЕРКИ правильности вычисления неизвестных составляется |
||||||||||||
уравнение моментов для всей конструкции относительно точки В (рис. С2.6): |
|||||||||||||
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
åmB (Fk ) |
= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
k=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
YE |
|
X E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
Е |
|
|
|
|
|
|
|
|
|
|
|
|
|
M A |
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
M |
|
|
|
|
|
|
|
q |
α |
5 |
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
R3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
R A |
|
С |
|
|
β |
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
А |
|
G |
|
|
Н |
4 |
|
|
|
|
|
|
|
|
|
3 |
|
3 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
Рис. С2.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
18 |
|
|
|
|
|
|
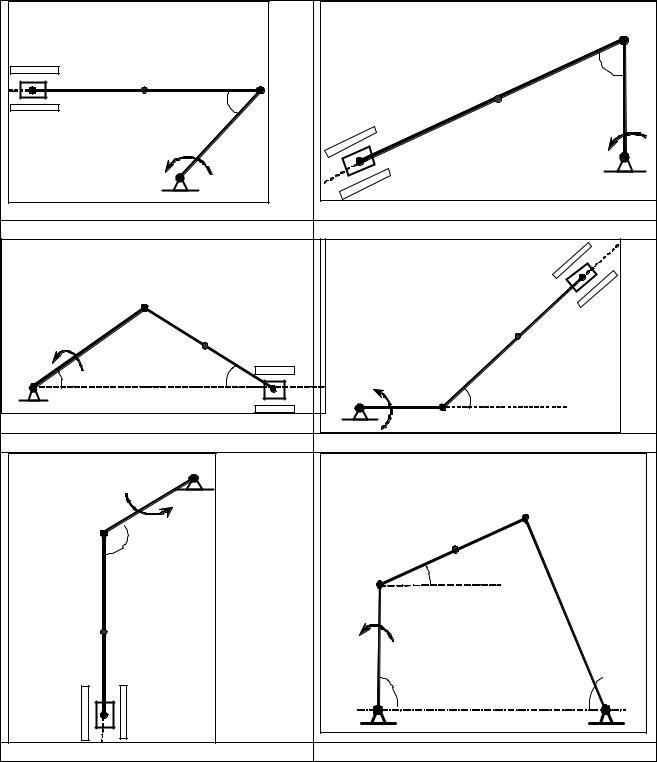
Задача К1. Плоское движение тела
Условие. Плоский механизм состоит из стержней и ползуна (рис. К1.0 – К1.4), стержней и колес (рис. К1.8, К1.9) и стержней (рис. К1.5 – К1.7) соединенных друг с другом и с неподвижными опорами шарнирами. Длины стержней и радиусы колес заданы в таблице К1. Кривошип ОА вращается с угловой
скоростью ωOA против часовой стрелки. Для заданного положения механизма найти:
1.Скорости и ускорения точек А,В и С;
2.Угловые скорости и угловые ускорения всех звеньев механизма.
Мгновенный центр скоростей и векторы скоростей точек изобразить на схеме механизма.
Указания. Задача К1 на исследование плоского движения тела. При ее решении скорости точек механизма и угловые скорости звеньев определяются с помощью теоремы о проекциях скоростей двух точек тела и с помощью мгновенного центра скоростей, применяя эти понятия к каждому звену механизма в отдельности. Учесть, что в вариантах К1.0 –К1.4ползун совершает поступательное движение вдоль направляющих, в вариантах К1.5 – К.17 звено О1В совершает вращательное движение вокруг точки О1, в варианте К1.8 колесо совершает плоское движение, в варианте К1.9 колесо вращается вокруг точки О1. Прежде чем производить расчеты, следует изобразить механизм, с учетом длины звеньев. Углы указаны на чертежах.
Таблица К1
Номер |
|
|
|
|
Последняя цифра шифра |
|
|
|
|||||
схемы, |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
предпо- |
Величина |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
следняя |
|
0 |
1 |
2 |
|
3 |
4 |
5 |
6 |
|
7 |
8 |
9 |
цифра |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шифра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OA, см |
15 |
20 |
25 |
|
30 |
40 |
20 |
30 |
|
40 |
15 |
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 – 4 |
АВ, см |
30 |
40 |
50 |
|
60 |
80 |
40 |
60 |
|
80 |
30 |
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωOA , рад/c |
0,5 |
1 |
1,5 |
|
2 |
2,5 |
3 |
1 |
|
2 |
2,5 |
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OA, см |
15 |
20 |
25 |
|
30 |
40 |
20 |
30 |
|
40 |
15 |
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 –7 |
АВ, см |
30 |
40 |
50 |
|
60 |
80 |
40 |
60 |
|
80 |
30 |
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О1В, см |
15 |
20 |
25 |
|
30 |
40 |
20 |
30 |
|
40 |
15 |
25 |
|
|
|
|
|||||||||||
|
ωOA , рад/c |
0,5 |
1 |
1,5 |
|
2 |
2,5 |
3 |
1 |
|
2 |
2,5 |
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OA, см |
50 |
20 |
60 |
|
30 |
40 |
20 |
30 |
|
40 |
50 |
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 – 9 |
АВ, см |
50 |
20 |
60 |
|
30 |
40 |
20 |
30 |
|
40 |
50 |
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R, см |
25 |
10 |
30 |
|
15 |
20 |
10 |
15 |
|
20 |
25 |
10 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωOA , рад/c |
0,5 |
1 |
1,5 |
|
2 |
2,5 |
3 |
1 |
|
2 |
2,5 |
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19
|
|
|
|
|
|
Рисунки к заданию К1 |
|
В |
|
|
|
|
|
А |
|
С |
А |
|
|
С |
|
||
|
|
|
|
|
|||
|
|
|
45° |
|
|
60° |
|
|
|
|
|
|
ωОА |
|
|
|
|
|
|
|
|
О |
|
|
εОА=2c-2 |
О |
ω |
|
В |
εОА= –1,5c-2 |
|
|
|
ОА |
|
|
|
|
|
|
|
К1.0 |
|
|
|
К1.1 |
|
|
|
А |
εОА=3c-2 |
|
εОА= –2,5c-2 |
|
|
|
|
|
|
|
|||
|
ωОА |
|
С |
|
|
В |
|
|
|
В |
|
|
С |
|
|
|
|
|
ωОА |
|
|
|
|
О |
30° |
|
30° |
А |
45° |
|
|
|
|
|
О |
|
|||
|
|
|
|
|
|
|
|
|
|
К1.2 |
|
|
|
К1.3 |
|
|
|
О |
|
|
|
|
|
|
|
ωО А |
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
А |
120° |
|
|
|
С |
|
|
|
|
А |
30° |
|
||
|
|
|
|
|
|||
εОА=1c-2 |
С |
|
ωОА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
О |
90° |
60° |
О1 |
|
|
|
|
|
|
|
|
|
|
К1.4 |
|
|
|
К1.5 |
|
|
|
|
|
20 |
|
|
|