

2010_03_КР ТеорМех
.pdfА |
|
|
В |
|
|
|
В |
О1 |
|
|
|
|
|
|
|||
ωОА |
|
С |
|
|
|
С |
|
|
|
|
|
|
|
|
|
||
|
|
|
60° |
|
А |
30° |
|
|
° |
|
|
О |
|
|
|
||
О 60 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
ωОА |
|
|
|
|
|
|
|
О |
|
|
|
|
|
|
К1.6 |
|
|
|
|
К1.7 |
|
|
|
|
|
|
|
А |
|
|
А |
|
В |
С |
|
ωОА |
С |
|
R |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
60° |
|
R |
О |
45° |
45° |
|
О1 |
|
|
|
|
В |
||||
|
|
|
|
|
|
|
|
|
О |
ωОА |
|
|
|
|
|
|
|
|
|
К1.8 |
|
|
|
|
К1.9 |
|
Пример К1. |
|
|
|
|
|
|
|
|
Дано: OA = 20 см , AB = 35 см ,ωOA = 2 рад/ c, εОА=3с–2
εОА=3с-2
В
С
|
ωОА |
|
О |
30° |
|
А |
||
|
Рис. К1.1 НАЙТИ: Для заданного положения механизма (рис. К1.1)
1.Скорость точки А;
2.Положение мгновенного центра скоростей и угловую скорость звена АВ;
21

3.Скорости точек В и С (средняя точка звена АВ);
4.Ускорения точек А, В и С;
5.Угловое ускорение звена АВ.
Мгновенный центр скоростей и векторы скоростей и ускорений точек изобразить на схеме механизма.
Решение. В кривошипно-ползунном механизме кривошип ОА совершает вращательное движение, шатун АВ – плоское и ползун В – поступательное. Вычисляем модуль скорости точки А при заданном положении механизма
υA = ωOA ×OA = 2 × 20 = 40 см с .
с .
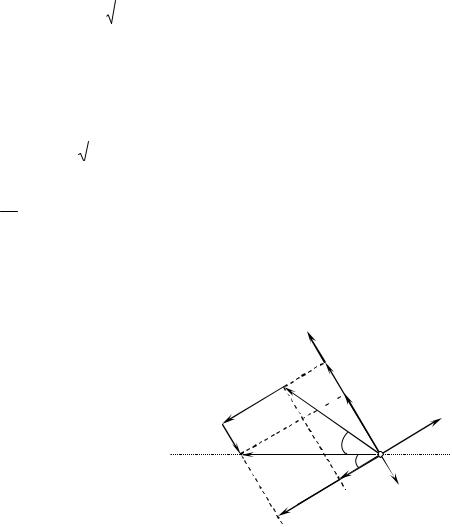
Вектор скорости точки А перпендикулярен кривошипу ОА. Скорость ползуна В направлена по горизонтали. Для ее определения воспользуемся мгновенным центром скоростей. Мгновенный центр скоростей РАВ шатуна АВ находится в точке пересечения перпендикуляров, проведенных из точек А и В к их скоростям (рис. К1.2).
Известно, что
υA = ωAB × APAB , υB = ωAB × BPAB , υC = ωAB ×CPAB
где ωAB – угловая скорость звена АВ.
Расстояния АРАВ, ВРАВ, СРАВ определим из треугольников АВРАВ, АСРАВ
APAB = AB × cos30o = 35 × 0,87 = 30,5см , ВPAB = AB ×sin 30o |
= 35 × 0,5 =17,5см CPAB =17,5см |
|||||
.Так как скорость υA известна, то ωAB = |
υA |
= |
40 |
|
=1,3 рад/с , следовательно |
|
AP |
30,5 |
|||||
|
|
|
||||
|
AB |
|
|
|
|
|
υB =1,3 ×17,5 = 22,8 см /c , υC =1,3×17,5 = 22,8 см /c . |
|
|
|
|||
r |
|
|
в сторону вращения звена |
|||
Вектор υC направлен перпендикулярно СРАВ |
||||||
АВ, т.е. по часовой стрелке (рис. К1.2).
Мгновенный центр скоростей и векторы скоростей точек указаны на рисунке К1.2.
В
vB
|
|
|
v |
A |
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωОА |
vC |
|
ωАВ |
|||||||
|
|
30° |
|
|||||||||
О |
|
|
А |
|
|
|
|
РАВ |
||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||
Рис. К1.2
22
Определение ускорений начнем с точки А. Известно, что эта точка вращается оп окружности радиусом ОА с угловой скоростью ωOA = 2 рад/ c и угло-
вым ускорением εOA =1 рад/ c2 . Следовательно, ее ускорение будет равно геометрической сумме:
|
|
|
r |
r |
|
r |
|
|
|
|
аА = |
аАn |
+ аАτ . |
||
При этом модуль ускорения точки А определим из теоремы Пифагора: |
|||||||
|
|
аА = |
|
, |
|||
|
|
(аАn )2 + (аτА)2 |
|||||
где аn |
= ω2 |
×OA = 22 × 20 = 80см/ с2 , а аτ = ε |
OA |
×OA = 3× 20 = 60см /с2 . Напомним, что |
|||
А |
OA |
|
А |
|
|
|
|
вектор нормального ускорения направлен по главной нормали от точки А к центру окружности О, а тангенциальное ускорение направлено по касательной
в сторону углового ускорения звена ОА. Таким образом, |
модуль ускорения |
|||||||||||
точки А будет равен |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аА = |
|
802 + 602 |
= 100см/ с2 . |
|
|
|
|
|
Для определения направления вектора ускорения точки А найдем |
|
|
||||||||||
r r |
r |
80 |
|
|
|
r |
rn |
|
|
|||
an |
|
|
|
о |
|
|||||||
сos(aA,aAn ) = |
rA |
= |
|
|
= |
0,8, следовательно, угол (aA |
,aA ) = 36 |
|
. |
|||
100 |
|
|||||||||||
|
aA |
|
|
|
|
|
|
|
|
|||
Направления всех найденных ускорений точки А покажем на рис. К1.3. |
||||||||||||
Замечание: в тех вариантах где εOA = 0 рад/ c2 , ускорение |
r |
r |
а его модуль |
|||||||||
аА |
= аАn , |
|||||||||||
аА = аnА .
|
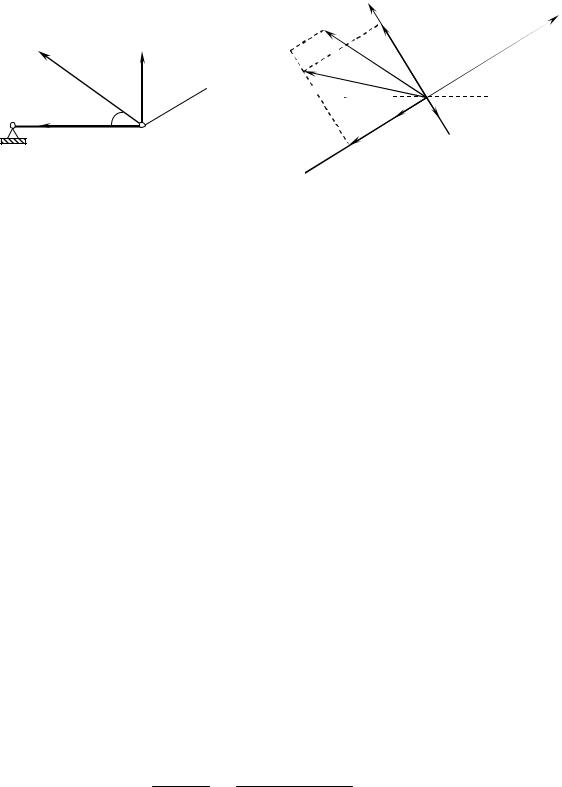
Перейдем к определению ускорения |
|
|
|
у |
|
|
|||||
точки В. Так как эта точка лежит на звене |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|||||||
АВ, которое совершает плоское движение, |
|
|
|
аAsin66 |
|
|||||||
то ее ускорение может быть найдено по |
aBAn |
|
|
|
||||||||
|
|
aA |
|
|
||||||||
формуле: |
|
|
|
|
|
r |
|
|
r |
|
|
|
r |
r |
r |
r |
|
|
|
|
|
аВsin30 |
|
||
|
|
аВ |
= а |
А + аВАn |
+ аВАτ , |
(1) |
r |
|
|
36o |
В |
х |
где |
r |
|
|
|
|
|
aBAτ |
r |
|
|
||
аА - это ускорение поступательного |
|
|
30o |
|
rτ |
|||||||
движения полюса, |
rn |
r |
ускорения |
|
a |
B |
|
|||||
а аВА и аВАτ , |
|
|
аAcos66 |
aBA |
||||||||
которые точка В получает вследствие |
|
|
|
|
||||||||
|
|
|
|
|
|
|||||||
вращения вокруг этого полюса. Модуль |
|
аВcos30 |
|
|
||||||||
ускорения |
r |
|
× АВ =1,32 × 35 = 59,2см/с2 . |
|
|
|
|
|
|
|||
аВАn = ωАВ2 |
|
|
Рис. К1.4 |
|
|
|||||||
Направлен вектор этого ускорения от точ- |
|
|
|
|
||||||||
ки В к точке А так как это показано на ри- |
|
|
|
|
|
|
||||||
сунке К1.4. Определить модуль ускорения |
|
|
|
|
|
|
||||||
r |
пока не можем, так как не известно угловое ускорение звена АВ. |
|
||||||||||
аВАτ |
|
|||||||||||
23
aA |
у |
х |
|
r |
|
|
rτ |
r |
асу |
аА |
|
||
aСA |
aС |
С |
|
|
|
|
О |
r |
36о |
асх |
|
А |
||
|
aСnA |
rτ
rn aСA
aСA
Рис. К1.3
|
|
Рис. К1.5 |
Для определения направления ускорений |
r |
r |
аВ |
и аВАτ выполним следующие |
построения. Из точки В последовательно в произвольном масштабе отложим
r r
векторы ускорений аА и аВАn , направления которых известны. Затем, через конец
r
вектора аВАn проведем перпендикуляр к звену АВ (именно вдоль него направлен вектор ускорения аrτВА ) и вдоль линии движения точки В проведем прямую. Там где прямая пересечется с перпендикуляром находятся концы двух векторов
r |
r |
|
|
|
|
|
|
аВ |
и аВАτ . Таким образом, направление этих ускорений найдено. |
||||||
|
Для того, чтобы определить модуль аВ спроецируем уравнение (1) на ось |
||||||
х. Получим: - аВ × сos30o |
|
|
r |
, отсюда |
|||
= -аА × cos66o - аВАn |
|||||||
|
|
|
|
r |
|
100 ×0,4 + 59,2 |
|
|
а |
В |
= |
аА ×cos 66o + аВАn |
= |
= 114см /с2 . |
|
|
сos30o |
|
|||||
|
|
|
0,87 |
|
|||
Прежде чем переходить к определению ускорения точки С, найдем угловое ускорение звена АВ. Для этого спроецируем уравнение 3.1. на ось у. Полу-
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
r |
|
|
чим: аВ ×sin 30o = аА ×sin 66o - аВАτ , учитывая что |
аВАτ = ε AB × AB , получим |
||||||||||||||||
|
|
εAB |
= |
аА ×sin 66o - аВ × sin 30o |
= |
100 × 0.91 -114 ×0.5 |
=1,1рад/ с2 . |
||||||||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
AB |
|
|
|
|
|
|
|
|
35 |
|
Ускорение точки С найдем как |
|
r |
|
|
r |
r |
|
||||||||||
|
|
|
|
|
|
|
|
|
r |
|
|
|
(2) |
||||
|
|
|
|
|
|
|
|
|
а |
= а |
А |
+ аn |
+ аτ , |
||||
|
|
|
|
|
|
|
|
|
С |
|
|
|
СА |
СА |
|
||
где аn |
= ω2 |
×СА =1,32 |
×17,5 = 29,6см/с |
2 ; аτ |
= ε |
АВ |
×СА = 1,1×17,5 =19,3см/ с2 . Спроециро- |
||||||||||
СА |
АВ |
|
|
|
|
|
|
|
СА |
|
|
|
|
|
|||
вав уравнение (2) на координатные оси, найдем |
|
|
|||||||||||||||
|
|
а |
= -а |
A |
× сos66o - аn |
= -100 × 0,4 - 29,6 = -69,6cм/ с2 |
|||||||||||
|
|
Сх |
|
|
|
|
СА |
|
|
|
|
|
|
|
|
||
|
|
а |
= а |
А |
× sin 66o - аτ |
|
=100 × 0,91 - 21,2 = 69,8cм /с2 |
||||||||||
|
|
Сy |
|
|
|
СА |
|
|
|
|
|
|
|
|
|
||
Модуль ускорения точки С найдем по формуле
аС = 
 аСх2 + аСу2 =
аСх2 + аСу2 = 
 (-69,6)2 + (69,8)2 = 98,6см/ с2 .
(-69,6)2 + (69,8)2 = 98,6см/ с2 .
Направление ускорения точки С показано на рисунке К1.5.
24

Задача К2. Сложное движение точки.
Плоская фигура D вращается вокруг неподвижной оси, проходящей через точку О1 перпендикулярно плоскости рисунка. Вращение фигуры задано уравнением: ϕпер = ϕпер (t) (ϕ – в радианах, t – в секундах), таблица К2.
По фигуре D вдоль прямой ОА или по окружности радиуса R, (рис.0–9) движется точка М. Закон ее относительного движения s = s(t) (s – в санти-
метрах, t – в секундах) задан в таблице 6. Положительное направление отсчета расстояния s = OM от точки О к точке А (на всех рисунках точка М показана в положении, при котором s = OM положительно).
Определить абсолютную скорость и ускорение точки М в момент времени t1 = 1 c и изобразить полученные векторы скорости и ускорения на рисунке.
Указания. Задача К–4 на сложное движение точки. При ее решении движение точки по фигуре D считать относительным, а вращательное движение самой фигуры – переносным и воспользоваться теоремами о сложении скоростей и сложении ускорений. Прежде чем производить расчеты, следует изобразить точку М в том положении, в котором нужно определить ее абсолютную скорость (или ускорение), а не в произвольном положении, показанном на рисунке к задаче.
|
|
|
|
|
|
|
|
|
Таблица к заданию К2 |
||||||
|
|
|
Уравнение относительного |
|
|
||||||||||
|
ϕпер = ϕпер (t) , рад |
|
|
движения точки М |
|
R, |
|
||||||||
№ |
s = s(t) , см |
φ=φ(t), рад |
|
||||||||||||
см |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рис. |
рис. 3,4,9 |
|
|
||||||
|
|
|
0,1,2,5,6,7,8 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
2,5t 2 |
|
|
|
|
|
πt |
Rπsin |
π |
30 |
|
||||
0 |
|
R(1− sin 6 ) |
2 t |
|
|
||||||||||
1 |
1,5t2 |
|
R sin πt |
|
Rπt/2 |
20 |
|
||||||||
2 |
0,5t |
2 |
|
|
|
|
Rt2 |
|
R |
π |
2 |
10 |
|
||
|
4 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
t |
|
|
|||||
3 |
6t − t2 |
|
|
2Rt3 /3 |
|
Rπt/3 |
20 |
|
|||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2t − 3t2 |
|
2 |
|
|
R |
πt |
2 |
40 |
|
|||||
4 |
|
|
Rt /2 |
|
|
|
|
|
|
||||||
|
3 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
5 |
1,5t 2 + t |
R |
|
|
|
(t2 + t) /4 |
Rπ cosπt |
20 |
|
||||||
|
2 |
|
|||||||||||||
6 |
3t −t 2 |
|
|
|
|
Rt2 |
Rπ sin |
π t |
30 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
7 |
t − 3t 2 |
|
|
Rt 3 /2 |
|
|
R |
πt |
3 |
10 |
|
||||
|
|
6 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
8 |
0,5t 2 − 3t |
|
|
|
|
3 |
Rt2 |
Rπ cos π t |
20 |
|
|||||
|
4 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
4 |
|
|
||||
9 |
2t − 0,5t2 |
R |
|
|
|
(t2 + t) /6 |
|
Rπt/9 |
40 |
|
|||||
|
2 |
|
|
||||||||||||
25

|
|
|
|
|
|
|
|
Рисунки к заданию К2 |
|
|
|
М |
А |
|
|
|
R |
|
|
ОА=R |
|
|
А |
М |
О |
|
|||
|
|
|
|
|
D |
|
|||
|
|
|
|
|
|
|
|
|
|
О |
|
ϕпер |
|
|
|
ϕпер |
О1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
К2.0 |
|
|
|
|
К.2.1 |
|
|
|
|
|
|
|
А |
|
|
О |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
А |
|
|
|
|
|
|
D |
ϕпер |
М |
|
|
|
|
|
|
|
|
|
2R |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
О |
|
|
|
|
D |
М |
|
|
|
|
|
|
|
|
|
||
|
|
R |
|
|
|
ϕпер |
|
|
|
|
|
|
|
|
|
О1 |
|
|
|
|
|
|
К2.2 |
|
|
|
|
К.2.3 |
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
О |
|
|
|
|
|
|
ϕпер |
|
|
R |
|
М |
R |
D |
М |
|
|
|
|
|
|
|
|
|
|
|
О1 |
R |
|
D |
|
А |
|
90° |
45° |
О |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
ϕпер |
О1 |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К2.4 |
|
|
|
|
К.2.5 |
|
|
|
|
|
|
|
О |
|
|
|
|
D |
|
М |
|
|
|
А |
М |
О |
2R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
R |
D |
|
|
|
|
|
|
|
|
|
|
|||
30° |
|
|
|
|
|
|
|
||
|
|
|
|
|
ϕпер |
О1 |
|
|
|
|
|
|
|
|
|
2R |
|
||
R |
|
ϕпер |
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
О1 |
|
|
|
|
|
|
|
|
|
К2.6 |
|
|
|
|
К.2.7 |
|
|
|
|
|
|
|
26 |
|
|
|

А |
М |
О |
|
||
|
|
|
D |
|
М |
2R |
|
R |
|
А |
|
|
|
D |
ϕпер |
О1 |
О |
|
||
|
ϕпер |
|
R |
R |
|
|
К2.8 |
К.2.9 |
Пример К2. |
|
O2 |
|
|
||
ДАНО: R = 25 см , |
|
|
||||
D |
|
О |
||||
|
|
= 4t - 0,2t 2 рад , OM = π t2 |
|
|
||
j |
|
см |
|
|
||
пер |
|
4 |
|
|
|
|
t1 |
= 5 c . |
|
М |
|
||
|
R |
|
||||
|
|
|
|
|
|
|
Найти в заданный момент времени абсо- |
|
|
||||
лютную скорость и абсолютное ускоре- |
|
|
||||
ние точки М. Показать на чертеже поло- |
|
|
||||
жение точки в момент времени t1, а так- |
|
|
||||
же найденные |
векторы скорости и уско- |
|
|
|||
рения. |
|
А |
ϕпер |
О1 |
||
|
|
|
|
|||
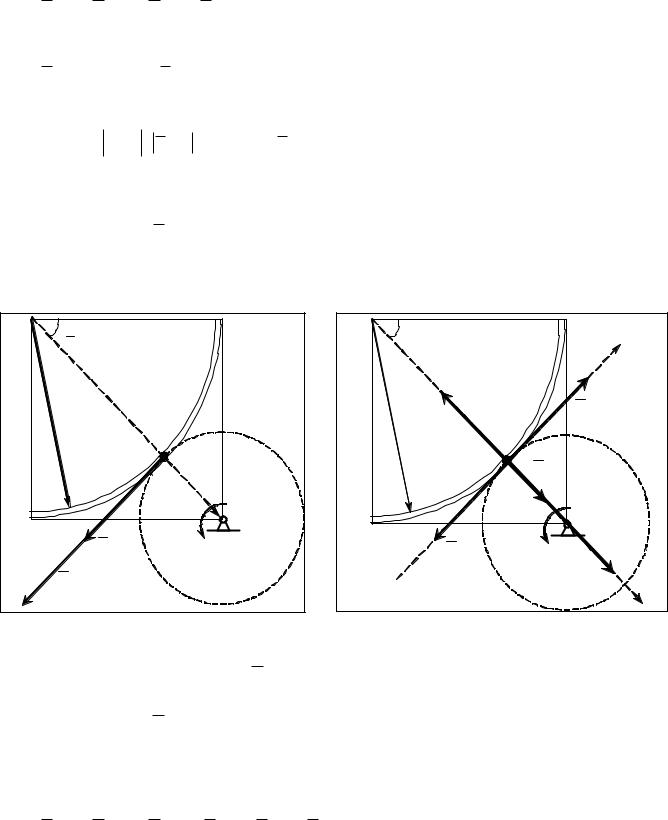
Решение. Абсолютное движение точки |
|
|
||||
М относительно неподвижной плоскости, в которой вращается рамка D, явля- |
||||||
ется сложным и состоит из двух движений: относительного по |
рамке и пере- |
|||||
носного вместе с рамкой. |
|
|
|
|||
|
|
Для определения относительного движения мысленно остановим рамку |
||||
(исключим переносное движение), тогда точка движется по дуге окружности |
||||||
OM, т.е. эта дуга траектория относительного движения точки М. Относительное |
||||||
движение точки заданно естественным способом. Найдем положение точки М |
||||||
на относительной траектории: |
|
|
|
|||
sотн = OM (t = 5) = p4 ×52 = 254× p (см ).
Угол на который повернулась точка М за 5 сек вокруг центра О2
ÐOO2M = |
sотн (5сек) |
= |
25p 4 |
= p (рад ), |
|
R |
25 |
||||
|
|
4 |
|||
|
|
|
|
27 |

т.е. точка в рассматриваемый момент времени находится на биссектрисе ÐOO2M в положении М1.
Относительная скорость точки М
vотн = dsотн |
= p |
×2t = p |
×t |
d t |
4 |
2 |
|
В заданный момент времени
æ см ö ç ÷ . è c ø
vотн (5) = |
p |
æ |
см ö |
|
2 |
×5 = 2,5p = 7,85 ç |
|
÷ , |
|
|
||||
|
è |
c ø |
||
причем вектор vотн направлен по касательной к траектории относительного движения, т.е. перпендикулярно O2M вправо (vотн > 0 ) (рис. К4.2).
Относительное ускорение точки М
aотн = aотнτ + aотнn .
Касательное относительное ускорение
τ |
dvотн |
æ p |
ö/ |
|
p |
æ |
см ö |
|||
aотн = |
|
= ç |
|
×t ÷ |
= |
|
=1,57 ç |
|
|
÷ |
d t |
2 |
2 |
|
c 2 |
||||||
|
è |
ø |
|
è |
|
ø |
||||
и aотнτ направлено так же как и относительная скорость (рис.К3.3). Так как касательное относительное ускорение не зависит от времени и vотн > 0 и
aотнτ > 0, то относительное движение точки равноускоренное. Нормальное относительное ускорение
aотнn = |
vотн2 |
, |
|
r |
|||
|
|
где ρ = R – радиус кривизны относительной траектории точки (в случае прямолинейного относительного движения ρ = ∞ и aотнn = 0).
aотнn = |
v2 |
|
(2,5p)2 |
= 0,25p2 |
æсм ö |
||
отн |
= |
|
= 2,46 ç |
|
÷, |
||
R |
25 |
|
|||||
|
|
|
è c 2 |
ø |
|||
и aотнn направлено к центру кривизны относительной траектории от М к О2
(рис.К1.3).
Для определения переносного движения точки М мысленно остановим в рассматриваемый момент времени точку на относительной траектории в положении М1 (исключим относительное движение). Тогда вращаясь вместе с телом D точка М1 описывает окружность радиуса М1О1 с центром в точке О1. эта окружность переносная траектория точки в момент времени t1 = 5 c . Найдем ра-
диус этой окружности
M1O1 = O1O2 -O2M1 = R 
 2 - R = R ×0,41см .
2 - R = R ×0,41см .
28
Переносную скорость и переносное ускорение точки найдем как скорость и ускорение точки М1, принадлежащей вращающемуся телу D:
vпер = wпер × M1O1 ;
aпер = aперτ + aперn ,
где a τ |
= e |
пер |
×M O , |
an |
= w2 |
×M O . |
пер |
|
1 1 |
пер |
пер |
1 1 |
Найдем угловую скорость и угловое ускорение переносного движения:
|
|
djпер |
|
|
|
æ |
рад ö |
||
wпер = |
|
|
|
= 4 - 0,2×2t = 4 |
- 0,4×t ç |
|
÷. |
||
|
dt |
|
|||||||
|
|
|
|
|
è |
c ø |
|||
|
dwпер |
æ |
рад ö |
|
|
|
|||
eпер = |
|
|
|
= -0,4 ç |
|
÷ . |
|
|
|
|
dt |
|
|
|
|
||||
|
|
è |
c 2 ø |
|
|
|
|||
Поскольку ωпер > 0, εпер < 0 и εпер не зависит от времени, то переносное вра-
щение равнозамедленное.
В рассматриваемый момент времени
vпер (5) = wпер (5)×M1O1 = 2×25×0,41= 20,5
æсм ö ç ÷. è c ø
Вектор vпер направлен перпендикулярно М1О1 в сторону переносного враще-
ния (рис. К4.2).
Касательное переносное ускорение
a τ |
|
|
(5) ×M O = 0,4×25 ×0,41 = 4,1 |
æсм ö |
||
= e |
пер |
ç |
|
÷ . |
||
|
||||||
пер |
|
1 1 |
è c 2 |
ø |
||
|
|
|
|
|||
Вектор aперτ направлен противоположно vпер (рис.К4.2). Нормальное переносное ускорение
n |
2 |
|
2 |
æ |
см ö |
|
aпер = (wпер (5)) |
× M1O1 = 2 |
|
× 25× 0,41 = 41 ç |
|
÷. |
|
|
c2 |
|||||
|
|
|
|
è |
ø |
|
Вектор aперn направлен от точки М1 к О1 (рис.К4.3).
Для определения абсолютной скорости применим теорему о сложении скоростей в сложном движении
vабс =vотн +vпер .
В данной задаче векторы vотн и vпер направлены в одну сторону вдоль одной прямой (рис. К4.2), следовательно, модуль vабс :
29
æ |
см ö |
||||||||
vабс =vотн +vпер = 7,85 + 20,5 = 28,35 ç |
|
÷ . |
|||||||
|
|||||||||
è |
c ø |
||||||||
Абсолютное ускорение найдем по теореме Кориолиса |
|||||||||
a |
абс = |
a |
отн + |
a |
пер + |
a |
кор . |
(1) |
|
Ускорение Кориолиса
aкор = 2×[wпер ,vотн ].
Определим модуль ускорения Кориолиса
aкор = 2 wпер × vотн ×sin (wпер ,vотн ).
Переносное вращение происходит вокруг оси, перпендикулярной плоскости рамки D, поэтому угол между переносной угловой скоростью wпер и относи-
тельной линейной vотн равен 90°, тогда
æсм ö |
||
aкор = 2× 2×7,85×1 = 31,4 ç |
|
÷ . |
|
||
è c 2 |
ø |
|
O2 |
π |
|
|
О |
O2 |
π |
|
О |
Х |
4 |
|
|
|
||||||
|
|
|
|
|
4 |
|
|
|
|
|
R |
|
|
|
|
aотнn |
|
aперτ |
|
|
|
|
|
|
R |
|
|
||
|
D |
М1 |
|
|
|
D |
|
М1 |
|
|
|
|
|
|
|
|
aперn |
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
О1 |
А |
|
|
|
О1 |
|
vпер |
jпер |
a |
τ |
jпер |
a |
|||
|
|
|
|
|
|
|
|
кор |
|
|
|
|
|
|
|
отн |
|
|
|
|
vотн |
|
|
|
|
|
|
|
Y |
|
|
Рис. К2.3 |
|
|
|
Рис. К2.3 |
|
||
Для определения направления aкор |
в данной задаче, вектор относительной ско- |
||||||||
рости необходимо повернуть на прямой угол в направлении переносного вра- |
|||||||||
щения, т.е. вектор aкор |
направлен от М1 к О1 (рис.К1.3). |
|
|
|
|||||
Абсолютное ускорение найдем методом проекций, для чего ось Х напра-
вим по М1О1.
В развернутом виде (1) можно записать
a |
абс = |
a |
отнτ + |
a |
отнn + |
a |
перτ + |
a |
перn + |
a |
кор . |
(2) |
Запишем выражение (2) в проекциях на оси М1ХУ
30